Изобретение относится к информа- 1Д1ОННО. -измерительной технике и может найти применение в различных областях, связанных с измерением массы тел.
Цель изобретения - повышение быстродействия весов путем не- посредственного преобразования сигнала некомпенсации в сигнал уравновешивания.
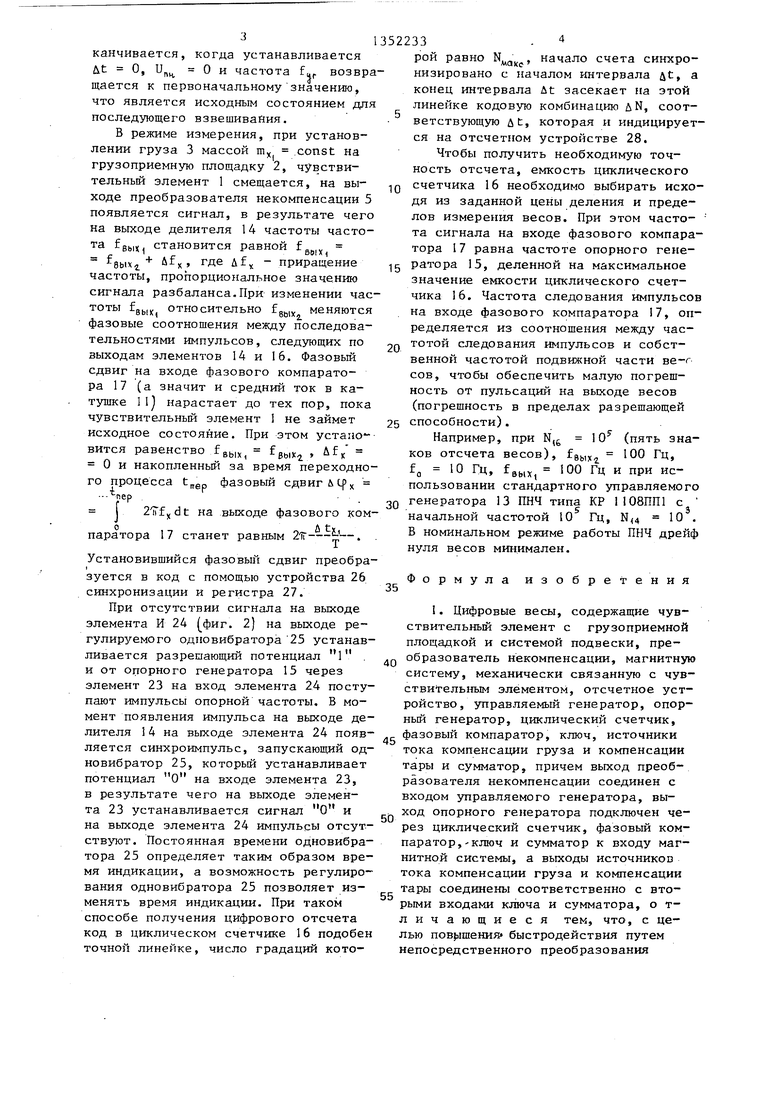
На фиг. 1 изображена структурная схема весов;на фиг.2 и 3 - функциональная схема устройства синхронизации и его временная диаграмма.
Весы содержат чувствительный элемент 1 с грузоприемной площадкой 2 и грузом 3, систему 4 подвески, преобразователь 5 некомпенсации, состоящий из светодиода 6, фотоприемника 7 и щелевой диафрагмы 8, магнитную систему 9, состоящую из постоянного магнита 10 и измерительной катзтпки 1 1 регистр 12, управляемый генератсУр 13, делитель 14 частоты, опорный генератор 15, циклический счетчик 16, компаратор 17, ключ 18, источники тока компенсации груза 19 и компенсации тары 20, сумматор 21, устройство 22 синхронизации, состоящее из двух элементов И 23, 24 и регулируемого од- новибратора 25, и отсчетное устройство 26.
Чувствительный элемент 1 механически связан с измерительной катушкой 11 магнитной системы 9. Выход преобразователя некомпенсации 5 соединен с входом управляемого генератора 13. Выход опорного генератора 15 подключен через циклический счет- чик 16, фазовый компаратор 17,ключ 18 и сумматор 21 к выводу измерительной катушки 11 магнитной системы 9. Выходы источников тока компенсации груза 19 и компенсации тары 20 соединены соответственно с вторыми входами ключа 18 и сумматора 21. Информационный выход циклического счетчика 16 соединен через регистр 12 с одноименным входом отсчетного устройства 26, а выход управляемого генератора I3 подключен к входу делителя 14 частоты, выход которого соединен со вторы входом фазового компаратора 17 и первым входом устройства синхронизации 22, подключенного своим вторым входо и выходом соответственно к выходу опорного генератора и счетному входу регистра 12.
0
5
0
25
0
35 и
Первый вход устройства синхронизации 22 соединен с первым входом второго элемента И 24, выход которого подключен к выходу устройства 22 син-i хронизации и входу регулируемого од- новибратора 25, подключенного своим выходом к первому входу первого элемента И 23, а второй вход устройства синхронизации 22 соединен с вторым входом элемента И 23, выход которого подключен к второму входу элемента И 24.
Весы работают следующим образом.
Предварительно в процессе изготовления .и поэлементной ластройки весов частоту управляемого генератора 13 fnp регулируют при нулевом управляющем напряжении до выполнения условия
f.tr f
N7. N,e
частота следования импульсов на выходе опорного генератора 15;
числа импульсов на выходах соответственно делителя 14 частоты и циклического счетчика 16.
Выходной ток источника 20 тока компенсации тары регулирзтот при отсутствии груза 3 на грузоприемной площадке 2 и запертом ключе 18 до достижения равновесия подвижной части весов, при котором выходное напряжение преобразователя некомпенсации 5
где
N
14
f. N,6 пн
равно нулю.
40
При включении настроенных таким образом весов между сигналами равных
частот и --,-- на входах фазо- NH N,6
вого компаратора I7 вначале возникает произвольный фазовый сдвиг, и импульсы на первом входе фазового компаратора 17 оказываются задержанными 45 по отношению к импульсам на его втором.входе, следующим с постоянным периодом
Т некотором интерва
50
ле. На выходе ключа 18 получают импульсы тока, создающие в катушке 11 компенсатора дополнительную силу, пропорциональнзто среднему току 1 --При этом равновесие нарушается, становится и„ О и частота fup возрастает, что приводит в свою очередь к уменьшению задержки t и уменьшению
среднего тока
I о j
Этот процесс за3
канчивается, когда устанавливается ut О, и О и частота f возвращается к первоначальному значению, что является исходным состоянием для последующего взвешивания.
В режиме измерения, при установлении груза 3 массой т const на грузоприемную площадку 2, чувствительный элемент 1 смещается, на выходе преобразователя некомпенсации 5 появляется сигнал, в результате чего на выходе делителя 14 частоты частота fsbix, становится равной выч,, uf, где д - приращение частоты, пропорциональное значению сигнала разбаланса.При изменении частоты fgbiK, относительно fg меняются фазовые соотношения между последовательностями импульсов, следующих по выходам элементов 14 и 16. Фазовьш сдвиг на входе фазового компаратора 17 (а значит и средний ток в катушке lj нарастает до тех пор, пока чувствительный элемент I не займет исходное состояние. При этом устано
вится равенство fgbix, О и накопленный за время переходного процесса фазовый сдвиг л Lp ...inep на выходе фазового компаратора 17 станет равным .
Установившийся фазовый сдвиг преобразуется в код с помощью устройства 26 синхронизации и регистра 27.
При отсутствии сигнала на выходе элемента И 24 фиг. 2) на выходе ре- гулирз емого одновибратора 25 устанавливается разрешающий потенциал 1 . и от опорного генератора 15 через элемент 23 на вход элемента 24 поступают импульсы опорной частоты. В момент появления импульса на выходе делителя 14 на выходе элемента 24 появляется синхроимпульс, запускающий од- новибратор 25, которьш устанавливает потенциал О на входе элемента 23, в результате чего на выходе элемента 23 устанавливается сигнал О и на выходе элемента 24 импульсы отсут- CTBJTOT. Постоянная времени одновибра- тора 25 определяет таким образом время индикации, а возможность регулирования одновибратора 25 позволяет изменять время индикации. При таком способе получения цифрового отсчета код в циклическом счетчике 16 подобен точной линейке, число градаций кото52233-
рой равно , начало счета синхронизировано с началом интервала дй, а конец интервала At засекает па этой линейке кодовую комбинацию дН, соответствующую At, которая и индицируется на отсчетном устройстве 28.
Чтобы получить необходимую точность отсчета, емкость циклического
Q счетчика 16 необходимо выбирать исходя из заданной цены деления и пределов измерения весов. При этом частота сигнала на входе фазового компаратора 17 равна частоте опорного гене g ратора 15, деленной на максимальное значение емкости циклического счетчика 16. Частота следования импульсов на входе фазового компаратора 17, определяется из соотношения между час2Q тотой следования импульсов и собственной частотой подвижной части ве-г сов, чтобы обеспечить малую погрешность от пульсаций на выходе весов (погрешность в пределах разрешающей
25 способности).
Например, при N, 10 (пять знаков отсчета весов), fenxi fg 10 Гц, fsь( 100 Гц и при использовании стандартного управляемого
3Q генератора 13 ПНЧ типа КР 1108ПП1 с начальной частотой 10 Гц, N 10 . В номинальном режиме работы ПНЧ дрейф нуля весов минимален.
5
0
Формула изобретения
1. Цифровые весы, содержащие чувствительный элемент с грузоприемной площадкой и системой подвески, преобразователь нёкомпенсации, магнитную систему, механически связанную с чувствительным элементом, отсчетное устройство, управляемый генератор, опорный генератор, циклический счетчик, фазовый компаратор, ключ, источники тока компенсации груза и компенсации тары и сумматор, причем выход преобразователя некомпенсации соединен с входом управляемого генератора, выход опорного гезшратора подключен через циклический счетчик, фазовый компаратор, -ключ и сумматор к входу магнитной системы, а выходы источников тока компенсации груза и компенсации тары соединены соответственно с вторыми входами ключа и сумматора, о т- личающиеся тем, что, с целью пов 11шения« быстродействия путем непосредственного преобразования
0
5
сигнала некомпенсации в сигнал управления, в них введены регистр, делитель частоты и устройство синхронизации, причем информационный вькод циклического счетчика соединен через регистр с одноименным входом отсчетно- го устройства, а выход управляемого генератора подключен к входу делителя частоты, выход которого соединен с вторыми входами фазового компаратора и первым входом устройства синхронизации , подключенного своим
вторым входом и выходом COOT.ветственно к выходу опорного генератора и счетному входу регистра.
фиг.2
П П п п п п п п п п
/у iiitHiiniiiiiiiiiiiiiiiiiiHiiiiiiiiiitiiiiHiHiiiiiiiiiiiiiiiiiHiniiiiii
5Л
t/Hduffatfuu
Редактор М.Товтин
Фиг.:
Составитель С, Шакин Техред М.Моргентал
Заказ 5553/36Тираж 694Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
2. Be сы по п. 1, отличающиеся тем, что их устройство синхронизации содержит первьш и второй элементы И и регулируемьй одно- вибратор, причем первый вход устройства синхронизации соединен с первьм входом второго элемента И, выход которого подключен к выходу устройства синхронизации и входу регулируемого одновибратора, подключенного своим выходом к первому входу первого элемента И, а второй вход устройства синхронизации соединен с вторым входом первого элемента И, выход которого подключен к второг у входу второго элемента И.
н Ьходу синхр. 27
п
Корректор И.Муска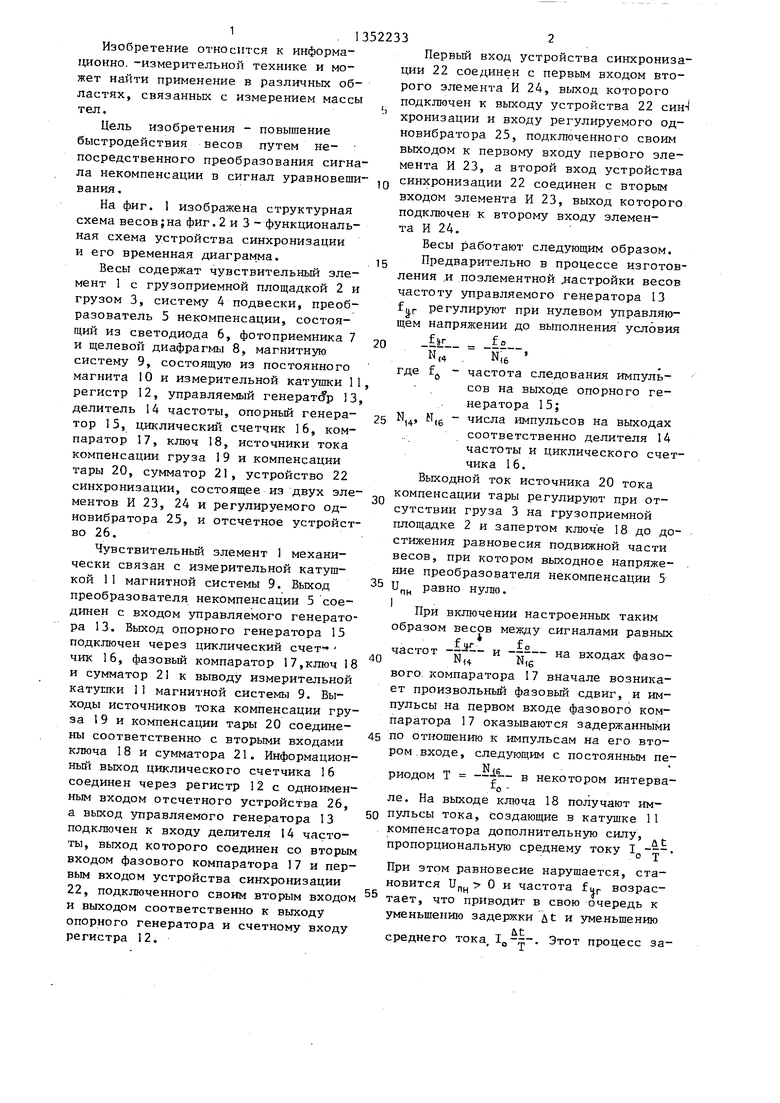
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровые весы | 1982 |
|
SU1089423A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Электронные цифровые весы | 1981 |
|
SU991175A1 |
| Весоизмерительное устройство | 1979 |
|
SU918793A1 |
| Устройство для измерения электрических величин | 1987 |
|
SU1525592A1 |
| Электронные цифровые весы | 1981 |
|
SU966502A1 |
| Автоматическое весоизмерительноеуСТРОйСТВО | 1979 |
|
SU851107A1 |
| Весоизмерительное устройство | 1988 |
|
SU1578497A1 |
| Электронные цифровые весы | 1980 |
|
SU943533A1 |
| Весоизмерительное устройство | 1986 |
|
SU1314233A1 |
Изобретение относится к области информационно-измерительной техники. Цель изобретения - повьшение быстродействия весов. Весы содержат чувствительный элемент 1, грузоприемиую площадку 2 с грузом 3, систему 4 подвески, преобразователь 5 некомпенсации, состоящий из светодиода 6, фотоприемника 7 и щелевой диафрагмы 8, магнитную систему 9, состоящую из постоянного магнита 10 и измерительной катушки 11, регистр, генератор 13, делитель 14 частоты, генератор 15, счетчик 16, компаратор 17, ключ 18, источник 19 тока компенсации груза и источник 20 компенсации тары, сумматор 21 и устройство 22 синхронизации. Введение новых элементов и образование новых связей между злемен- тами устройства позволяют производить непосредственное преобразование сигнала некомпенсации в сигнал уравновешивания. Частота следования импульсов на выходе компаратора 17 определяется из соотношения между частотой следования импульсов и собственной частотой подвижной части весов, чтобы обеспечить малую погрешность от пульсаций на выходе весов. 1 3.п. ф-лы, 3 ил. i (Л о in ю чЭ СО со
| Электронные цифровые весы | 1978 |
|
SU742719A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электронные цифровые весы | 1981 |
|
SU966502A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
