54) .ЭЛЕКТРОМАГНИТНЫЕ ВЕСЫ

| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитные весы | 1979 |
|
SU838388A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Электронные цифровые весы | 1981 |
|
SU991175A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1394055A1 |
| Электромагнитные весы | 1983 |
|
SU1150492A1 |
| Электромагнитные весы | 1988 |
|
SU1627854A1 |
| Электромагнитные весы | 1979 |
|
SU800666A1 |
| Электромагнитные весы | 1986 |
|
SU1337671A1 |
| Весы с электромагнитным уравновешиванием | 1981 |
|
SU993036A1 |
1
Изобретение относится к технике измерения массы, а более конкретно к точным весам с электромагнитным уравновешиванием-.
Известны электромагнитные весы, содержащие две подвижные катушки, расположенные в зазоре магнитной системы и связанные с двумя преобразователями некомпенсации и двумя электрическими системами уравнрвешивания l .
Однако известные весы имеют недостаточную точность.
Наиболее близки1Ш по технической сущности к предложенному являются электромагнитные весы, содержащие упруго подвешенный чувствительный с грузоприемной чашкой, связан ый с системой уравновешивания в виде катушки силовой компенсации, расположенной в поле магнитной системы, источника линейного изменяющегося тока, стабилизатора тока тар блока управления с его ключом и коммутатором и эталонную катушку опорного веса с ее : источником тока и коммутатором р.
Однако указанные весы также имею ограничения по точности, обусловленные погрешностью чувствительности
от дрейфа нуля, вызываемого эталонной системой, а также сложны по конструкции и имеют низкую технологичность из-за наличия второй, эталонной катушки системой ее подвески, второй электрической схемой уравновешивания, датчиком перемещения эталонной катушки и т.д.
Цель изобретения -.повышение точ0ности и наделсности весов.
Цель достигается тем, что весы снабжены дискриминаторами верхнего и нижнего по оси действия силы тяжести положения эталонной катушки,
5 фиксатором нижнего положения чувствительного элемента, при этом дискриминаторы верхнего и нижнего положения соединены через блок управления с управляющими входами коммутато0ра и источника линейно изменяющегося тока, соединенного через ключ с катушкой силовой компенсации, причем дискриминатор нижнего положения контактирует с посадочными упорами
5 чувствительного элемента.
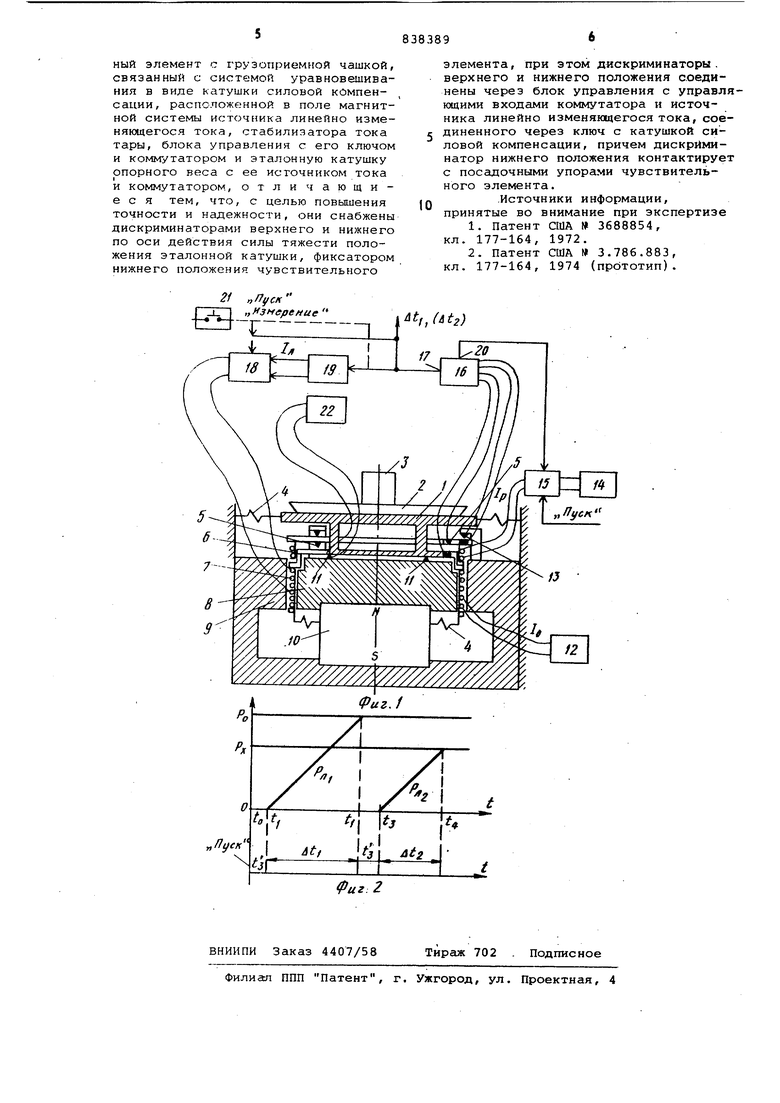
На фиг. 1 схематически изображены электромагнитные весы; на фиг; 2 диаграмма, поясняющая их работу.
Весы содержат чувствительный эле0 мент 1 с грузоподъемной чашкой 2 для
измеряемого груза 3 с массой т, систему упругой подвески 4 чувствительного элемента 1, упоры 5 на эталонной катушке 6 дискриминатора нижнего положения катушки, силовую катушку If расположенную в середине (Рабочего зазора магнитной системы, о полисными наконечниками 8, магнитопроводом 9 и постоянным магнитом 10.
Чувствительный элемент 1 расположен на упорах 11 фиксатора его нижнего положения и вывешивается с помощью стабилизированного тока .1, подаваемого в катушку 7 от стабилизатора 12 тока тары. Эталонная катушка 6 расположена в краевой области зазора в крайнем верхнем положении, зафиксированном упорами 13 дисриминатора верхнего положения катушки с помощью постоянного тока от источника 14, соединенного с катушкой б через коммутатор 15. Упоры 5 и 13 с соответствующими им посадоными упорами (пластинами) на чувствительном элементе 1 и эталонной катушке б образуют контактные пары,, подключенные ко входам схемы 16 управления , формирующей управляющие импульсы напряжения. Один из выходо 17 схемы 16 управления соединен с управляющим входом ключа 18, которы коммутирует выход источника 19 (генратора) линейно возрастающего тока с силовой катушкой 7, а также с тактовым входом источника 19 тока
Другой выход 20 схемы 16 управле ия соединен с управляющим входом коммутатора 15. Выход 17 является одновременно выходом временных интервалов предлагаемого устройства. Входы ключа 18 и источника 19 сединены с лусковой кнопкой 21, формирующей сигнал на начало измерения Упоры 11 электрически соединены со входом индикатора 22 вывешивания тапы.
Работа весов осуществляется следующим образом.
В исходном положении при Р О катушка 6 опорного веса находится в крайнем верхнем положении и прижата током IP при включенном коммутаторе 15 к упорам 13. Ток 1 стабилизатора 12 тары регулируется до .т.ех пор, пока чувствительный элемент не снимается с упоров 11, о свидетельствует индикатор 22 разиыкания контактов упора 11 с чувствительным элементом 1.
После того, как тара вывешена, нажатием кнопки 21 ПУСК, коммутатор 15 выключает ток 1р и катушка 6 опускается на чувствительный элемен 1, фиксируя на нем свое положение в направляющих упорах 5. При эакыкании контактной пары 5 формируетсяв схеме 16 управления импульс замыкания ключа 18 и начала формирования
линейно возрастающего тока в генераторе 19. Ток 1 в катушке 6 (фиг.2) линейно растет и вместе с ним линейно возрастает усилие Рд 1к. течение времени At, (где: длина е ВИТКОВ катушки; BQ - индукция), до величины равной Рд РО когда чувствительный элемент 1 вместе с опорным весом РО поднимается в верхнее крайнее положение и фиксируется в нем,
Q в момент времени t (фиг. 2) по замыканию контактной пары упора 13. Схемой 16 формируется сигнал, по которому ключ 18 закрывается, катушка 7 обесточивается, а кату.щка 6 запитывается через коммутатор 15 от источника 14 тока, оставаясь в верхнем положении.
Чувствительный элемент 1 опускается на упоры 11, и на чашку 2 весов устанавливается измеряемый вес Р .
0 после нажатия кнопки 21 ИЗМЕРЕНИЕ ключ 18 замыкается и в момент времени t- запускается генератор 18 (фиг. 1) линейно изменякмцегося тока Тд. в катушке 7. Электромагнитное
5 усилие Рдг 1„Вд1д линейно возрастает в течение времени utg пока усилие Рд2 не достигнет величины Р , и чувствительный элемент, перемещаясь вверх, замыкает контактную
Q пару с упором 5. При этом схема 16 формирует импульс t, по которому ключ 18 размыкается, а генератор 19 прекращает формирование линейно изменяющегося тока 1д и чувствительный элемент 1 опускается в нижнее положение на упоры 11.
Выходные интервалы времени it и Atj далее измеряются и запоминаются. Таким образом, в течение первого такта измеряется опорный вес.
° РС РМ 4BolA. ., ,
где Кц - чувствительность гене° ратора (постоянная интегратора тока). . В течение второго такта измеряется вес
РХ РА4 кВо1Аа LK, .
Измеряя отношение временных интервалов, находим
&t2
Т.е.
At.
измеряемый вес -Р пропорционален отitoношению временных интервалов -гг
и не зависит ни от магнитной индукции BO, ни от коэффициента преобразования К„.
Электромагнитные весы просты по своей конструкции и имеют малую погрешность измерения по сравнению с известными.
Формула изобретения
Электромагнитные весы, содержащие упруго подвешенный чувствительный элемент с грузоприемной чашкой, связанный с системой уравновешивания в виде катушки силовой компенсации, расположенной в поле магнитной системы источЕ1ика линейно изменяющегося тока, стабилизатора тока тары, блока управления с его ключом и коммутатором и эталонную катушку опорного веса с ее источником тока и коммутатором, отличающиеся тем, что, с целью повышения точности и надежности, они снабжены дискриминаторами верхнего и нижнего по оси действия силы тяжести положения эталонной катушки, фиксатором нижнего положения чувствительного
21 пПуск
элемента, при этом дискриминаторы . верхнего и нижнего положения соединены через блок управления с управляющими входами коммутатора и источника линейно изменяквдегося тока, соединенного через ключ с катушкой си ловой компенсации, причем дискриминатор нижнего положения контактирует с посадочными упорами чувствительного элемента.
.Источники информации, принятые во внимание при экспертизе
