Ё

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СБОРА И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 1990 |
|
SU1825189A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОЧНОСТИ КРЫЛА ВОЗДУШНОГО СУДНА | 2011 |
|
RU2469289C1 |
| УСТРОЙСТВО ДЛЯ СБОРА, РЕГИСТРАЦИИ И СТАТИСТИЧЕСКОЙ ОБРАБОТКИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 1996 |
|
RU2115163C1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Устройство для отладки программно-аппаратных блоков | 1985 |
|
SU1315984A1 |
| Устройство для отладки программно-аппаратных блоков | 1983 |
|
SU1242965A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| ИМИТАТОР СИГНАЛОВ УПРАВЛЕНИЯ ПОЗИЦИОНИРОВАНИЕМ МАГНИТНЫХ ГОЛОВОК ОТНОСИТЕЛЬНО МАГНИТНЫХ ДИСКОВ | 1991 |
|
RU2017239C1 |
| Многоканальное регистрирующее устройство | 1988 |
|
SU1698899A1 |
| Устройство для отладки программно-аппаратных блоков | 1984 |
|
SU1290329A1 |

Изобретение относится к технике контроля и позволяет повысить качество испытаний турбины по различным параметрам. Система с помощью датчика 1 оборотов, связанного через формирователь 2 и коммутатор 3 с блоком 5 регистров памяти и индикации, измеряет параметры вращения ротора турбины, оценивает их и принимает решение о достоверности информации и необходимых мерах воздействия на системы регулирования и защиты турбины, осуществляемых путем выдачи сигналов на испол- нительный механизм 13 и звуковое
Os СО О Ч| О
О
сигнальное устройство 12 и отображения информации на индикаторах блока 5. Работа системы синхронизируется сигналами с генератора 4 опорной частоты и делителя 11 частоты. Параметры вращения турбины формируются в блоке 6 измерения параметИзобретение относится к технике контроля и регулирования и предназначено для проведения испытаний для противоразгон- ной защиты турбины повышением частоты вращения,испытаний на сброс нагрузки и других испытаний, при которых необходимо контролировать скорость вращения или другие производные от периода роторов турбины параметры, может быть использовано для дублирования механических автоматов безопасности турбины.
Цель изобретения - повышение надежности работы системы,
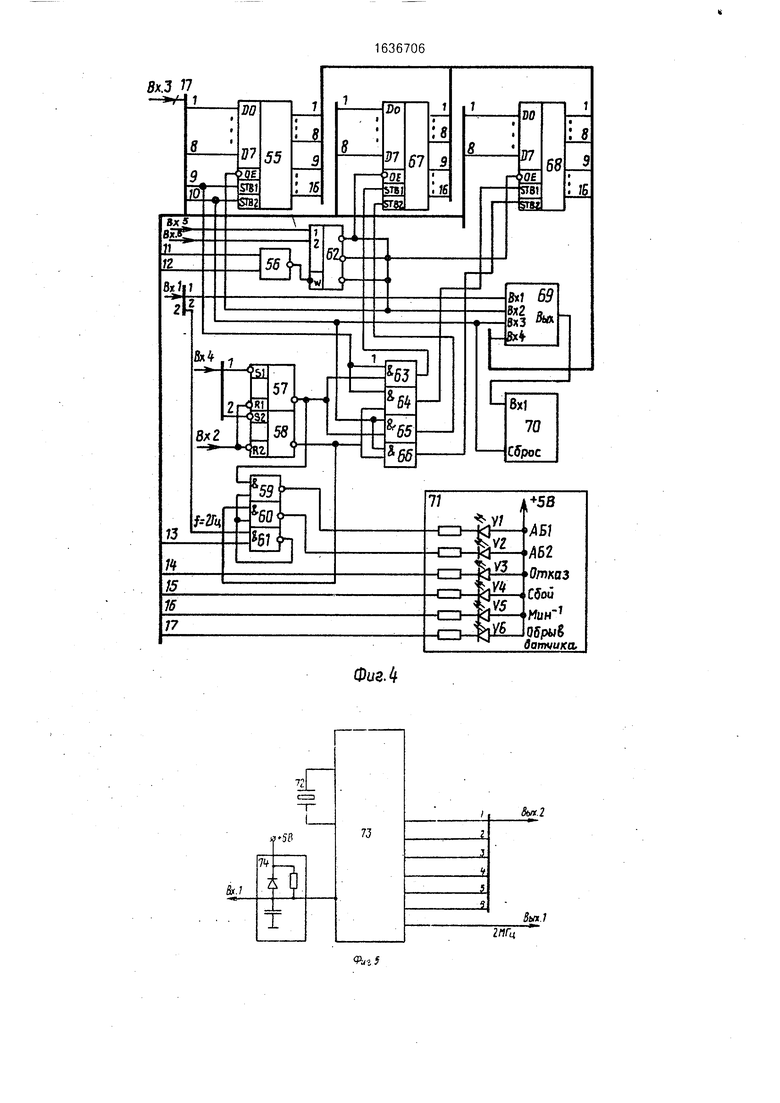
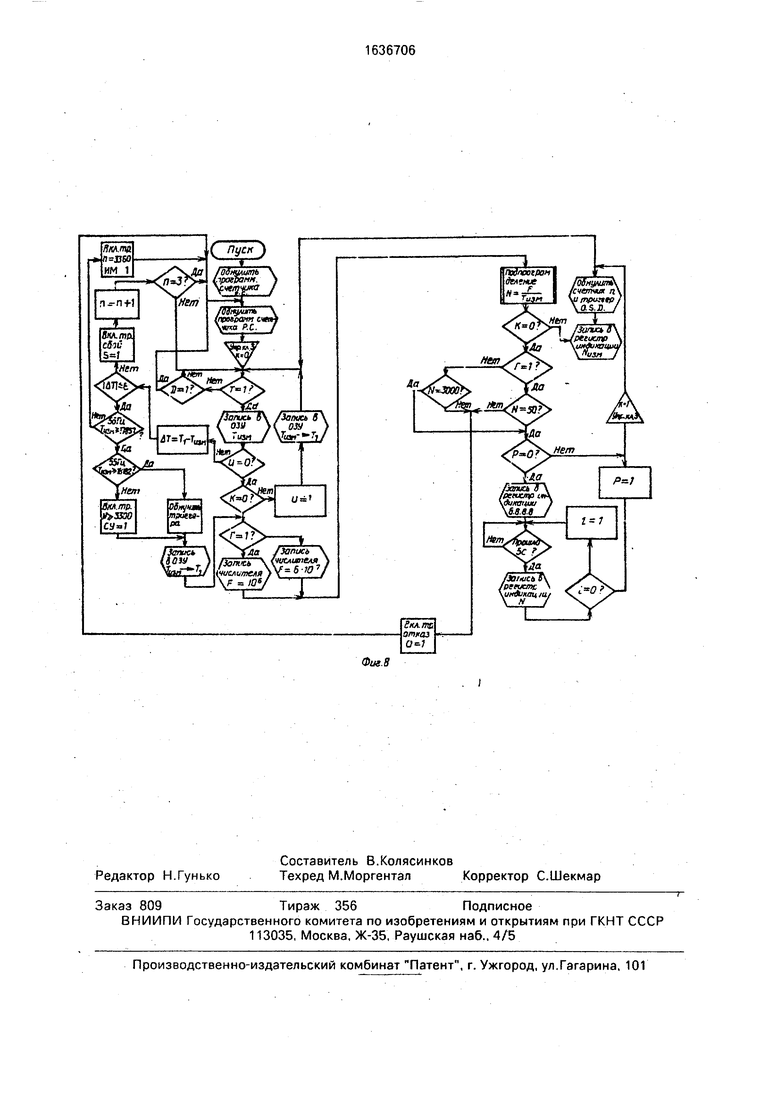
На фиг. 1 представлена структурная схема системы; на фиг. 2 - блок измерения параметров вращения (БИПВ); на фиг. 3 - блок вычислений и фиксации состояний параметров турбины (БВФС); на фиг. 4 - блок регистров памяти и индикации (БРПИ); на фиг. 5 - генератор опорной частоты (ГОЧ); на фиг. 6 - блок управления памяти (БУП), расположенный в БВФС; на фиг. 7 - блок преобразования кодов (ВПК), расположенный в БРПИ; на фиг. 8-блок-схемаалгоритма работы системы.
Система для проведения испытаний турбины (фиг. 1) содержит датчик 1 оборотов, подключенный к входу формирователя 2 импульсов, первый коммутатор 3, генератор 4 опорной частоты, БРПИ 5, БИПВ 6, два датчика 7 и 8 срабатывания бойков автомата безопасности турбины, подключенные к входам блока 9 фиксации начала торможения. Кроме того, система содержит БВФС 10, делитель 11 частоты, сигнальное устройство 12, исполнительный механизм 13, ключ 14, кнопочный переключатель 15 и второй коммутатор 16.
Выход формирователя 2 импульсов подключен к первому входу первого коммутатора 3, второй вход которого подключен к первому выходу делителя 11 частоты, второй выход которого подключен к первым входам БРПИ 5 регистров памяти и индикации БИПВ 6 измерения параметров вращения, а вход - к первому выходу генератора 4 опорной частоты, второй выход которого подключен к первому входу БВФС 10, кнопочный переключатель 15 подключен к входу генератора 4 опорной частоты и второму
ров вращения, а информация о срабатывании автомата безопасности турбины сдатчиков 7 и 8 срабатывания бойков автомата безопасности турбины вводится через блок 9 фиксации начала торможения в блок 5 регистров памяти и индикации. 8 ил.
входу БРПИ 5 и БВФС 10, третий и четвертый входы последнего подключены к ключу 14, а пятый вход- к выходу БИПВ 6, второй вход которого подключен к выходу первого
коммутатора 3, третий вход которого подключен к первому выходу БВФС 10, второй, третий, четвертый и пятый входы которого подключены соответственно к третьему входу БИПВ 6, входу исполнительного механизма 13, входу сигнального устройства 12 и третьему входу БРПИ 5, четвертый вход последнего подключен к выходу блока 9 фиксации начала торможения, а пятый и шестой входы - к второму коммутатору 16.
БИПВ 6 может быть выполнен в виде
(фиг, 2) схемы И 17 и двойных счетчиков 18-23, схемы И-НЕ 24-26, регистров 27-29, одновибратора 30, схемы НЕ 31.
БВФС 10 (фиг. 3) может быть выполнен
в виде микропроцессора 32,триггеров 33-40, БУП 41, схем И-НЕ 42-46, перепрограммируемого постоянного запоминающего устройства (ППЗУ) 47, оперативного запоминающего устройства (ОЗУ) 48, схемы
И-НЕ 49, трехстабильного буфера 50, состоящего из трех стабильных схем 51-53 и схемы И 54. На входы LA2...LA14 подаются сигналы LA2...LA14 выборки портов ввода- вывода (регистров системы),формируемые в
блоке 41 управления памяти.
БРПИ 5 (фиг. 4) может быть выполнен в виде основного регистра 55, схемы И-НЕ 56, триггеров 57 и 58, схем И-НЕ 59-61, дешифратора 62, схем И 63-66, дополнительных регистров 67 и 68, блока 69 преобразования кодов, блока 70 семи сегментных индикаторов и блока 71 светодиодных индикаторов.
Генератор 4 опорной частоты (фиг. 5)
может быть выполнен в виде кварцевого резонатора 72, схемы 73 формирования сигналов управления и опорной частоты и схемы 74 начальной установки.
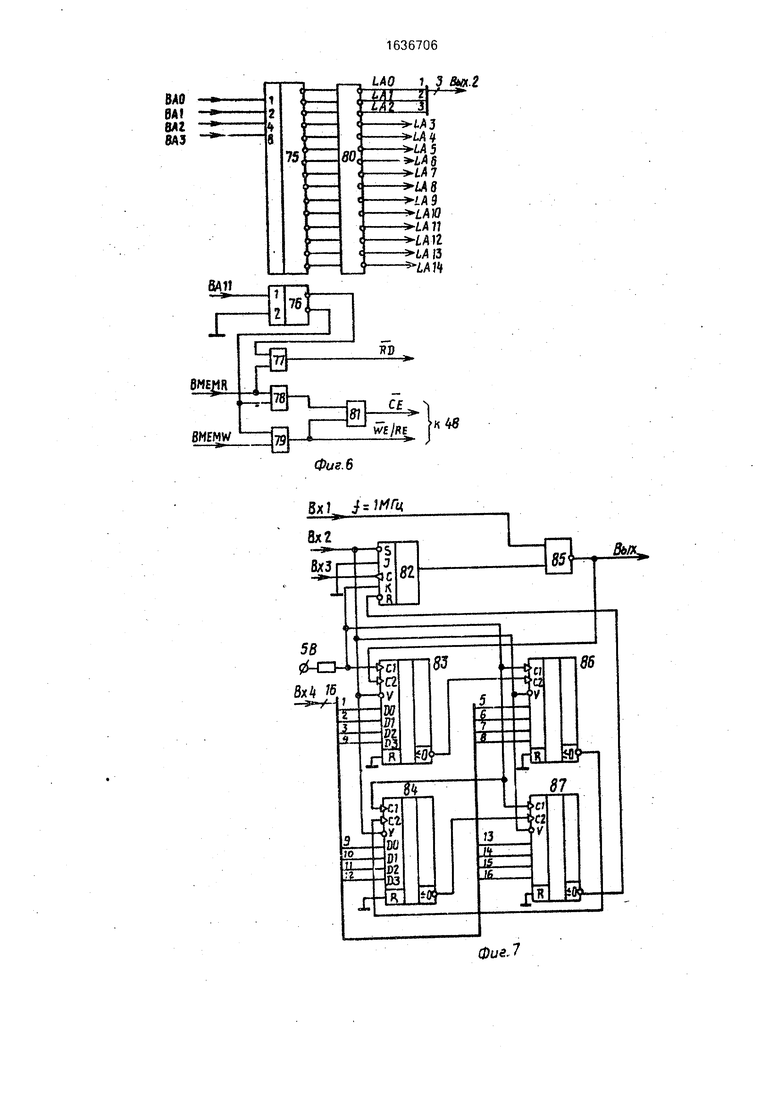
БУП 41 (фиг. 6) может быть выполнен в
виде дешифратора 75, триггера 76, схем 7779 или блока 80 схем НЕ и схемы И 81. На
выводах LA2...LA14 БУП 41 формируются
сигналы выборки портов ввода-вывода.
Блок 69 преобразования кодов (фиг. 7)
может быть выполнен в виде триггера 82,
реверсивных счетчиков 83 и 84, схемы И-НЕ 85 , реверсивных счетчиков 86 и 87.
Все блоки и узлы системы могут быть выполнены на основе микропроцессорного комплекта большой интегральной схемы и цифровых микросхем средней и малой степени интеграции.
Система работает следующим образом.
При включении питания или при нажатии переключателя 15 Пуск в генераторе 4 (фиг. 5) вырабатываются импульсы RESET и RESIN, которые приводят схемы в исходное состояние и производят начальную установку микропроцессора 32 БВФС 10 (фиг. 3). Микропроцессор 32 начинает выполнять микропрограмму, записанную в ППЗУ 47, которая реализует аглоритм, представленный на фиг. 8.
Первым вырабатывается управляющий сигнал (триггер 33), подключающий выход делителя 11 через коммутатор 3 к входу БИПВ 6. При этом собственная частота генератора 4, поделенная в делителе 11 до 50 Гц ( мс), поступает на вход одновиб- ратора 30. Выходной сигнал одновибратора 30 совместно с другой поделенной в делителе 11 частотой (1 МГц) поступают на входы схемы И 17 и далее на двоичные счетчики 18-23. Счетчики считают количество п поступающих на С-вход импульсов( МГц)за время мс. После окончания Т-строба (одновибратор 30) БИПВ 6 передает информацию в БВФС 10 на шину данных и к триггеру 40. Микропроцессор 33 анализирует окончание Т-строба (триггер 40, ), и по формулам вычисляются частота, (Гц)
F - п
и скорость ()
N
60 f
(2)
Полученные результаты сравниваются с эталонными величинами (50 Гц или 3000 ), хранящимися в памяти.
В случае совпадения результатов измерительная и вычислительная части системы признаются работоспособными и программа производит включение всех светодиодов блока 71 и сегментов цифрового индикатора блока 70 на 5 с для визуального контроля работоспособности индикации.В течение 5 с индицируется измеренное эталонное значение. Если результат проверки отрицательный (числа не совпали), зажигается индикатор Отказ, и проверка работоспособности циклически повторяется. После проверки устройство автоматически переводится в основной режим работы - контроль за скоростью (частотой) вращения
ротора турбины. При этом коммутатор 3 соединяет выход формирователя 2 с входом БИПВ 6. Производится измерение времени первого оборота ротора ТИэм и результат записывается в память (ОЗУ 48) как время
первого оборота Ti. Во время вычисления и перезаписи измеряется время второго оборота ротора, и после окончания второго Т-строба () сравнивают период первого и второго оборотов ротора. Если они отличаются на величину, меньшую, чем Б , то есть |Т1-Тизм1 Ј , где Ј - достаточно малая известная величина, определяемая по максимально-возможному ускорению ротора в процессе проводимых испытаний, то фиксируется достоверная информация.
Вычисляется по формулам (1) или (2) в зависимости от положения ключа 14 соответствующая измеренному периоду оборота ротора скорость (частота) вращения,
выводится на индикацию в БРПИ 5 и передается для анализа на достигнутую скорость. Величина ТИом записывается в ОЗУ 48 на место Ti, ожидается окончание третьего Т-строба, снова производится сравнение и
т.д. до тех пор, пока lTi-Тизм 1 Ј .При этом фиксируется сбой информации, срабатывает триггер 34, зажигается соответствующий индикатор блока 71. Блокируется передача этой информации (Тизм) к системам анализа
скорости и вычислений. Производится повторное измерение и сравнение с Ti. Если результат снова отрицательный, производится аналогичный цикл третий раз. Если снова I Ti-Тизм f , то вырабатывается
сигнал на самопроверк устройства по собственному эталонному сигналу, как это описано выше. Если при самопроверке числа не совпадают, включается триггер 38, индикатор Отказ блока 71 и звуковое
сигнальное устройство 12 с плавающим тоном, хорошо различным даже в условиях повышенного шума ГРЭС. Устройство переходит в режим непрерывной самопроверки до устранения неисправности.
Когда числа совпадают (подтверждается работоспособность устройства), триггер 38 возвращается в исходное состояние и устройство снова переходит в режим контроля за скоростью вращения роторов.
В процессе работы возможен случай-,
когда во время измерения одного из периодов оборота сигналы от датчика оборотов исчезнут. При этом переполнится счетчик 23 в БИПВ 6, включится триггер 39 (D--1), индикатор обрыв датчика блока 71 и звуковое устройство 12. Устройство переходит к самопроверке и далее, как уже описано выше. Как только I П-Тизм I :Ј Е, фиксируется достоверная информация, индикаторы сбоев выключаются, информация выводится на цифровой индикатор блока 70 и допускается к системе анализа достигнутой скорости (блок 10).
Система анализа скорости проверяет сначала достижение максимальной скорости вращения 3360 (Тизм 17857), если результат положительный, проверяется достижение максимально допустимой скорости вращения 3300 мин (Тизм S 18182) и т.д. всех заранее предусмотренных скоростей вращения, на которые надо выдавать управляющие сигналы или включать соответствующую сигнализацию. При сравнении учитывается, что тактовая частота заполнения измерительных счетчиков 1 МГц. Если скорость превышена, срабатывает соответствующий триггер 35, 36 и включается устройство 12 или исполнительный механизм 13.
Благодаря тому, что система выполнена в виде программно-аппаратного комплекса, имеется возможность обеспечить различные вычислительные и аналитические функции с выдачей требуемых сигналов как к системам сигнализации;так и к системе защиты и оперативного управления турбины.
Система контролирует состояние бойков автомата безопасности турбины. При срабатывании датчиков 7 или 8 блок 9 инициирует запись скорости вращения, на которую настроен каждый из них, в соответствующий регистр памяти, и включает соответствующий индикатор в БРПИ 5, фиксирующий момент срабатывания. При этом бойки автомата безопасности могут быть отключены от системы защиты. Надежность испытаний обеспечивается самим устройством, которое при скорости 3300 включает сигнальное устройство 12, а приЗЗбО - исполнительный механизм 13, обеспечивающий прекращение подачи пара с помощью противоразгонной защиты турбины. Для исключения случайного несанкционированного включения исполнительного механизма 13 в устройство вводят две дополнительные проверки, аппаратная - путем анализа срабатывания триггера 35 (3300 мин ) в предыдущем цикле измерений (схема И 54) и программная - путем анализа реальности измерений скорости. После окончания испытаний скорость вращения,
при которой срабатывают бойки автомата безопасности турбины, можно вывести на индикацию с помощью коммутатора 16 в любой удобный момент времени.
Измерение скорости вращения происходит следующим образом.
Сигнал от датчика 1 оборотов, пропущенный через формирователь 2, поступает на коммутатор 3 и далее на второй вход БИПВ 6.
Запускается одновибратор 30, формирующий инверсный Т-строб, длительностью 0,5 мкс.В момент перехода его из состояния логической единицы в состояние логического нуля обнуляются счетчики 19-23. В момент перехода его из состояния логического нуля в состояние логической единицы (Т-строб) разрешается прохождение импульсов от датчика 11 частотой 1 МГц на первый вход блоков 19, 20, 21 и 22 и 23,
которые формируют значение двоичного кода Т-стр оба. Передним фронтом сигнала формирователя 2 двадцатичетырехразрядный код фиксируется в регистрах 17, 28 и 29 и сохраняется до момента прихода следующего от формирователя 2. На этом заканчивается цикл измерения времени оборота ротора.
Цикл вычислений скорости вращения идет параллельно с циклом измерений.
Цикл вычислений начинается с запроса микропроцессором 32 информации о состоянии триггеров 37, 39,40 БВФС 10, реагирующих соответственно на состояние ключа 14 Гп, , переполнение счетчика 23
БИПВ 6 и момент окончания Т-строба. Триггерам 37-40 соответствуют порты ввода-вывода выбираемого по сигналам LA 10, LA13 и LA12. Из этих портов данные передаются в микропроцессор 32 для их анализа. Адрес
читаемого порта, выставляемый микропроцессором 32 на шине адреса (ВАО-ВАЗ), дешифруется БУП 41. На выходе БУП 41 в соответствии с его входным кодом устанавливаются сигналы выбора портов А10, А12 и
А13, которые поступают на первые входы схем И-НЕ 42-44. Выходные сигналы схем И-НЕ 42-44 поступают на вторые входы соответствующих трех стабильных схем 51-,- 53, которые открываются этими сигналами
для передачи на шину данных (BDO) и далее в микропроцессор 32 информации о логических состояниях триггеров 37-40. При отсутствии управляющих сигналов схемы 51-53 переходят в высокоимпедансное состояние.
Когда на вторых входах схем 42-44 появляется сигнал В1 /OR (чтение) микропроцессора 32, на шину данных (BDO) поступает информация о состоянии одного из указанных выше портов, соответствующих триггерам 37-40. Если на неинвертирующем выходе триггера 37 устанавливается состояние логической единицы (ключ 14 находится в положении Гц, фиг. 1), то определяется частотой согласно формуле (1). Из соответствующей ячейки ППЗУ 47 в микропроцессор 32 передается число 106. Когда ключ 14 находится в положении МИН (на выходе триггера 37 логический нуль), то определяется скорость согласно формуле (2). Из ячейки ППЗУ 47 в микропроцессор передается число 60 -106.
Триггер 40 устанавливается в состояние логической единицы выходным сигналом схемы НЕ 30 БИПВ 6, поступающим с выхода БИПВ 6 на пятый вход БВФС 10 и далее на S-вход триггера 40. Микропроцессор 32 с помощью схемы 43 и 52 читает этот результат по шине данных (ВОО)и разрешает передачу данных (код числа п, формулы (1) и (2)) из регистров 27-29 на выход БИПВ 6
Если микропроцессор прочитал состояние логического нуля на выходе схемы 52, то передача данных из регистров 27-29 на выход БИПВ 6 запрещена. Регистрам 27-29 БИПВ 6 соответствуют выбираемые по сигналам LAO, LA1 и LA2 порты. Адреса портов выставляются микропроцессором 32 на шине адреса (ВАО-ВАЗ) и дешифрируются БУП 41 (фиг. 3). Сигналы выбора адреса портов LAO, LA1 и LA2 и сигнал В1 /OR (чтение) микрокалькулятором 32 с второго выхода БВФС 10 поступают на третий вход БИПВ 6 и далее на схемы И-НЕ 24-26. Схемы И-НЕ 24-26 своими выходными сигналами разблокируют выход соответствующего регистра 27-29, в момент прихода сигнала В1 /OR, и разрешают поступление информации по шине BDO-BD7 на выход БИПВ 6 и запись их в ОЗУ 48 БВФС 10. Далее микропроцессором 32 выполняется операция деления, а результат записывается в ОЗУ 48. Так определяется скорость (частота) вращения ротора турбины. Далее проверяется достоверность полученной информации и работоспособность устройства.
Моментом фиксации сбоя информации является выполнение неравенства |Ti-Тизм I Ј . В этом случае микропроцессор 32 выставляет адрес порта выбираемого по сигналу LA8, который дешифрируется БУП 41 БВФС 10. На 1-вы- ходе триггера 34 устанавливается сигнал LA8 выбора адреса порта. Выходной сигнал (логический нуль) триггера 34 поступает с пятого выхода БВФС 10 третий вход БРПИ 5 и зажигает индикатор Сбой блока 71. Блокируется выполнение циклов: проверка и фиксация предельных скоростей (частот)
вращения ротора турбины и вычисление его скорости (частоты). Запрет поступления информации (Тизм) для реализации описанных циклов производится не более трех раз. Поеле чего на шину адреса выставляется адрес порта, выбираемого по сигналу LA6, который дешифруется блоком 41. Сигнал LA6 выбора порта с выхода БУП 41 поступает на 1-вход триггера 33 БВФС 10, на выходе которого устанавливается .состояние логической единицы (сигнал , фиг.8) в момент выработки микропроцессором 32 сигнала Запись (B1/OW). Состояние логической единицы устанавливается также на первом
выходе БВФС 10, который связан с первым (управляющим) входом коммутатора 3 (фиг. 1). Коммутатор 3 отключает выход формирователя 2 и подключает первый выход делителя 11 частоты к второму входу 1 БИПВ 6.
Система переходит на самопроверку работоспособности по собственному эталонному сигналу,- согласно описанному циклу определения скорости (частоты) вращения ротора турбины. В случае совпадения полученных результатов с эталонными величинами 50 Гц или 3000 измерительная и вычислительная части системы считаются работоспособными1
В этом случае система автоматически
переводится в основной режим работы - контроль за скоростью (частотой) вращения ротора турбины. Для этого БУП 41 дешифрирует адрес порта, выбираемого сигналом
LA7, выставляемый микропроцессором 32 на шине адреса. Сигнал LA7 выбора порта поступает на К-вход триггера 33 БВФС 10. Когда на С-вход триггера 33 поступает сигнал микропроцессора 32 B1/OW (запись),
на его выходе устанавливается состояние логического нуля. В результате коммутатор 3 подключит к второму входу БИПВ 6 выход формирователя 2. Система переходит в основной режим работы - контроль за скоростью (частотой) вращения турбины. В случае несовпадения результатов проверки (числа не совпали с их эталонными значениями) микропроцессор 32 выставляет адрес порта, выбираемого сигналом LA11, который дешифрируется БУП 41. Сигнал LA11 выбора порта поступает на l-вход триггера 38 БВФС 10 и, когда на его С-входе появляется сигнал микропроцессора 32 B1/OW, на выходе триггера 38 устанавливается состояние логического нуля. Этот сигнал с пятого выхода БВФС 10 поступает на третий вход БРПИ 5 и зажигает световой индикатор Отказ блока 71, а также на один из входов схемы И 49, выходной сигнал которой с четвертого выхода БВФС 10 поступает на вход сигнализатора 12 (фиг. 1).
Если во время измерений сигналы от датчика 1 исчезнут, то переполнится счетчик 23 БИПВ 6 и инвертированный схемой НЕ 31 сигнал с четвертого разряда счетчика 23 поступает на выход БИПВ 6 далее на пятый вход БВФС 10 и на S-вход триггера 39, На инвертирующем выходе триггера 39 устанавливается состояние логического нуля, которое поступает на один из входов схемы И-НЕ 49 и на пятый выход БВФС 10. Логическая единица, появившаяся на выходе схемы И-НЕ 49, с четвертого выхода БВФС 10 поступает на вход сигнализатора 12 и включает его, а логический нуль с пятого выхода БВФС 10 поступает на третий вход БРПИ 5 и зажигает световой индикатор Обрыв датчика блока 71. На неинвертирующем выходе триггера 39 устанавливается сигнал логической единицы, который поступает на первый вход трехстабильной схемы 53 для опроса состояния триггера 39 микропроцессором 32.
Фиксация скорости вращения, при которой срабатывают датчики 7 и 8 срабатывания бойков автомата безопасности турбины, Производится следующим образом.
В момент срабатывания датчиков 7 и 8 в блоке 9 (фиг. 1) формируются два сигнала (логические нули), поступающие с его выхода на четвертый вход БРПИ 5 и далее на соответствующие S-входы триггеров 57 и 58. Триггеры 57 и 58 фиксируют момент срабатывания соответствукедего датчика 7 или 8 и устанавливают на входах и выходах схем 64-66, а также на входах побайтовой записи STB1, STB2 дополнительных регистров 67 и 68 состояния логического нуля. Перезапись информации в регистры 67 и 68 сигналами, поступающими на входы записи STB1 и STB2 основного регистра 55, а также на вторые входы схем И 63-66, запрещается. Информация в регистрах 67 и 68 сохраняется до момента прихода сигнала сброса на второй вход БРПИ 5 от кнопочного переключателя 15 (фиг. 1). При нажатии переключателя 15 на входах RI и R2 триггеров 57 и 58 устанавливается состояние логического нуля, а на их выходах - состояние логической единицы, разрешающее перезапись информации в регистры 67 и 68.
Проверка и фиксация предельных скоростей, а также любых других наперед заданных скоростей осуществляется следующим образом.
Информация о скорости (частоте) вращения ротора турбины, которая записывается в регистры 55, 67 и 68 БРПИ 5, проверяется микропроцессором 32 сначала на достижение максимальной скорости 3360 мин (Тизм 17857). Указанная скорость
вращения записывается в соответствующие ячейки ППЗУ 47 и вызывается в микропроцессор 32 для сравнения с измеряемой скоростью, Положительным результатом сравнения является выдача управляющих
сигналов на исполнительный механизм 13 или на включение соответствующей световой сигнализации в БРПИ 5 и звуковой сигнализации устройства 12.
Если проверка подтверждает достижение максимальной скорости вращения 3360 , то проверяется достижение максимально допустимой скорости вращения 3300 (Тизм 18182)и т.д. всех заранее предусмотренных скоростей вращения,
на которые надо выдавать управляющие сигналы или включать соответствующую сигнализацию. Если проверка подтверждает достижение скорости 3300 мин , то БУП 41 дешифрирует адрес порта, выбираемого
сигналом LA5, выставляемый микропроцессором 32 на шину адреса, и сигнал LA5 выбора адреса порта поступает на 1-вход триггера 35 БВФС 10. Триггер 35 срабатывает в момент прихода на его С-вход сигнала B1/OW с микропроцессора 32 и устанавливает на одном из входов схемы И 54 логическую единицу, разрешающую установиться на l-входе триггера 36 сигналу логической единицы в момент появления на
втором входе схемы И 54 сигнала LA3 выбора порта. Сигнал LA3 поступает на вход схемы И 54, если проверка покажет, что достигнута максимальная скорость 3360 мин . Логическим нулем инвертирующего выхода триггера 35 формируется сигнал логической единицы на выходе схемы И 49, который с четвертого выхода БВФС 10 поступает на вход устройства 12. Включается звуковое сигнальное устройство 12, сигнализирующее достижении максимально допустимой скорости вращения турбины.
Если проверка подтверждает достижение скорости 3360 (Тизм 5:17857), то
БУП 41 дешифрирует адрес порта, выбираемого по сигналу LA3, сигнал LA3 выбора адреса порта поступает на второй вход схемы И 54 и далее на l-вход триггера 36 БВФС 10. Сигнал логической единицы неинвертирующего выхода триггера 36 с третьего выхода БВФС 10 поступает на вход исполнительного механизма 13, а с пятого выхода БВФС 10 на третий вход БРПИ 5 и далее на второй вход схемы И-НЕ 61, На
первый вход схемы И-НЕ 61 поступает сигнал частотой 2 Гц с первого входа БРПИ 5, связанного с вторым выходом делителя 11. Таким образом, в момент установления ло гической единицы на втором входе схемы И-НЕ 61 ее выходной сигнал начинает изменяться с частотой 2 Гц, что приводит к изменению с такой же частотой сигналов на вторых входах схем И 59 и 60. Если к этому моменту триггеры 57 и 58, фиксирующие срабатывание датчиков 7 и 8, не срабатывают, то загорается аварийная световая индикация, роль которой выполняют индикаторы АБ1 и АБ2 блока 71, посылающие световые импульсы с частотой 2 Гц. Одновременно со световой индикацией включается звуковое устройство 12, так как логическим нулем инвертирующего выхода триггера 36 на выходе схемы 49 формируется сигнал логической единицы, поступающий с четвертого выхода БВФС 10 на вход минимального устройства 12.
Вывод результата на индикацию производится следующим образом.
Двухбайтные регистры 55, 67 и 68 памяти БРПИ 5 с раздельными (побайтовыми) стробируемыми входами записи STB1, STB2 принимают одновременно на свои информационные входы DO-D7 данные из ОЗУ 48 БВФС 10, которые поступают по шине данных с пятого выхода БВФС 10 на третий вход БРПИ 5. Микропроцессор 32 на шине адреса выставляет адрес порта, выбираемого сигналом LA14, которму соответствует первый байт регистра 55 БРПИ 5. БУП 41 Дешифрирует адрес этого порта, и сигнал LA14 выбора адреса порта с выхода БУП 41 поступает на первый вход схемы И 45.
Второму байту регистра 55 соответствует порт, выбираемый сигналом LA4, и сигнал LA4 выбора адреса порта (фиг. 3), который поступает на первый вход схемы И-НЕ 46. Когда на вторые входы схем И-НЕ 45 и 46 БВФС 10 и на С-входы триггеров 34-39 поступает сигнал микропроцессора 32 В1 /OW (запись), срабатывают триггеры 34-39, фиксирующие Сбой, Отказ, Обрыв датчика, и на выходах схем И-НЕ 45 и 46 формируются положительные стробы записи STB1 и STB2. Входные данные регистров 55, 67 и 68 (фиг. 4) защелкиваются передними фронтами стробов STB1 и STB2. Выходной двоичный шестнадцатиразрядный код одного из трех регистров 55, 67 и 68 поступает на четвертый вход блока 69 для преобразования в пропорциональное этому коду число импульсов, которые с выхода блока 69 поступают на счетчики и се- мисегментные индикаторы в блок 70. Передача данных из регистров 55, 67 и 68 на
четвертыйлход блока 69 разрешена, когда на входе ОЕ соответствующего регистра установится состояние логического нуля. Выбор входа ОЕ нужного регистра
осуществляется схемой 62 БРПИ 5 выполняющей роль коммутатора со стробируемы- ми входами, управляемого двоичным кодом. С помощью коммутатора 16 (фиг. 1) на пятом и шестом входах (входной двоичный вход
0 схемы 62) БРПИ 5 устанавливаются логические единицы, когда он находится в среднем положении. Если в этом случае на выходе схемы И-НЕ 56 и на входе W схемы 62 установится состояние логического нуля, то на
5 третьем выходе схемы 62 и на входе ОЕ основного регистра 55 установится состояние логического нуля Выход регистра 55 будет разблокирован и подключен к четвертому блоку 69. Логический нуль на выходе
0 схемы И-НЕ 56 появится, когда на ее входах установятся сигналы выбора адреса порта, выбираемого системой LA4, и управления В1 /OR (чтение) микропроцессора 32. Сигналы LA4 и B1/OR поступают с пятого выхода
5 БВФС 10 на третий вход БРПИ 5 и далее на входы схемы И-НЕ 56. Блок 69 преобразует двоичный шестнадцатиразрядный код регистров 55, 67 и 68 БРПИ 5 в пропорциональное ему число импульсов, поступающих на
0 счетчики блока 70. Блок 69 состоит из четырех реверсивных счетчиков 83, 84, 86 и 87, информация в которые заносится, когда на втором входе блока 69 появляется сигнал (ОЕ), разблокирующий выходы одного из
5 трех регистров 55, 67, 68 БРПИ 5. Одновременно с занесением данных с четвертого входа в счетчики 83, 84, 86 и 87 срабатывает триггер 82, устанавливающий на одном из входов схемы И-НЕ 85 состояние логиче0 ской единицы. Счетные импульсы с второго выхода делителя 11 (фиг 1) поступают на первый вход блока 69 и далее через схему И-НЕ 85 - на вычитающий вход С2 счетчика 83 и на вход блока 69. По достижении нуле5 вого кода в последовательно включенных счетчиках 83, 84, 86, 87 выходным сигналом счетчика 87 триггер 82 возвращается в исходное состояние ,и на его выходе и на входе схемы 85 установится состояние логи0 ческого нуля. Прекращается поступление счетных импульсов на выход блока 69 и на вычитающий вход С2 счетчика 83.
Третий блок входа 69 предусмотрен для предварительной установки на выходе триг5 гера 82 состояния логического нуля, препятствующего поступлению счетных импульсов на выход схемы И-НЕ 85. В момент записи второго байта данных в регистры 55, 67, 68 БРПИ 5 строб записи (STB2) поступает на третий вход блока 69 и на вход Сброс
блока 70 семисегментных индикаторов. Указанные блоки подготавливаются к приему очередной информации о скорости (частоте) вращения ротора турбины.
Благодаря тому, что система реализована в виде программно-аппаратного комплекса и обеспечена возможность параллельного выполнения измерительных и вычислительных операций, в системе реализованы следующие технические характеристики.
Система для проведения испытаний турбины позволяет измерять скорость (частоту) вращения роторов турбины с точностью до 1 об/мин, (0,03%). Время измерения - один оборот ротора. Время вычислений, проверки достоверности и анализа результатов меньше 0,02 с. Время измерения и вычислений запараллелено, т.е. контроль скорости ведется в непрерывном режиме.
Система позволяет автоматически фиксировать и исключать случайные сбои датчиков оборотов и других элементов системы, при этом двойная комплексная проверка работоспособности обеспечивает раннее выявление неисправностей и исключает возможность попадания недостоверной информации на индикацию и к системам регулирования и защиты турбины.
Система позволяет автоматически фиксировать момент достижения любой, наперед заданной скорости вращения и выдавать необходимые электрические, звуковые и световые сигналы, фиксация проводится путем сравнения Измерительного периода с данными, хранящимися в памяти, и поэтому практически не требует аппаратных затрат,
При достижении в процессе испытаний предельной скорости вращения 3360 об/мин система автоматически включает противо- разгонную защиту турбины, что исключает возможность возникновения аварийной ситуации от превышения частоты вращения, независимо от квалификации и внимательности персонала, проводящего испытания, от состояния механического автомага .безопасное ги и точности его настройки.
Система позволяет отключать бойки механического автомата безопасности от системы защиты, при этом испытание противоразгонной защиты повышением частоты вращения проводится за один пуск, что снижает длительность и трудоемкость этих испытаний,
Система может быть использована для дублирования станционных тахометров и автомата безопасности турбин, при зтом повышается надежность эксплуатации турбины в экстремальных ситуациях, например при сбросе нагрузки.
Система может выдавать сигналы для систем регулирования и диагностики. Например, можно оперативно определять состояние (экономичность) отдельных секций (паровпусков) путем ручного изменения расхода пара по одному из паравпусков и анализа получаемого изменения скорости
0 вращения роторов. Это возможно благодаря тому, что быстродействие системы намного превосходит быстродействие обратных связей в системе регулирования турбины, а точность позволяет зафиксиро5 вать даже незначительные изменения в скорости вращения.
Главным достоинством системы является ее потенциальная точность и надежность, достигнутая не только непрерывным конт0 ролем за достоверностью входной информации и работоспособностью системы, а самим техническим решением - разделением функций между программными и аппаратными модулями. Это значительно
5 уменьшает количество необходимых электронных элементов, уменьшает потребляемую мощность и расширяет функциональные возможности системы. При этом появляется возможность гибкой переналадки системы путем
0 смены программы, записанной в ППЗУ.
Кроме того, значительным преимуществом является то, что по разработанным критериям, отличающим достоверное измерение от сбоя, найдена такая последова5 тельность действия над входными сигналами, при которой стало возможным одновременное измерением параметров вращения определять достоверность информации и выдавать сигналы, повышаю0 щие надежность испытаний.
Сущность технического решения, реализованного в системе, заключается в уменьшении погрешности за счет исключения случайных сбоев датчика оборотов, по5 мех в линиях связи и сбоев самого измерителя, а также в фиксации определенных состояний (скоростей вращения роторов) турбины с выдачей звуковых, световых и управляющих сигналов. Это достигается
0 путем сравнения априорной (заранее известной) информации с измеренной величиной. Такой априорной информацией является собственная (эталонная) частота генератора опорной частоты, поделенная
5 (делителем частоты) до величины рабочей частоты вращения роторов (50 Гц); максимально возможная разность времени двух последовательных оборотов ротора (е), вычисленная по максимально возможному ускорению роторов (ускорение определяется
по известной массе и действующей силе). максимально возможная, максимально допустимая, критическая и т.д.скорости(периоды) вращения роторов.
Сравнение в описанной реализации системы осуществляет микропроцессор, при этом код эталонной величины хранится в памяти, Вместо микропроцессора для сравнения может быть применен, например, реверсивный счетчик. При этом импульсы в одном такте измерения подаются на суммирующий вход, а во втором - на вычитающий эталонный код (записанный в памяти) переписывается по параллельным шинам. Можно также использовать интегратор, при этом последовательно импульсы подаются на инвертирующий и неинвертирующий входы, а эталонную величину хранит стабилитрон.
Использование микропроцессора более целесообразно, так как для вычисления скорости (частоты) по периоду вращения необходимо выполнять операцию деления. При этом реализуется также техническое решение функции. Различные электронные элементы системы совмещают функции, т.е. в различные моменты времени используются для разных целей, таких элементов много, основными являются микропроцессор (совмещает операции деления, сравнивания и принятия решений), ППЗУ (хранит микропрограмму и эталонные величины), генератор опорной частоты и делитель частоты (вырабатывают тактовые импульсы для измерительного и вычислительного трактов системы и выдают эталонный период), счетчики (используются для счета числа импульсов и выявляют обрыв датчика), цифровой индикатор ( показывает текущее значение скорости - частоты - вращения и настройку бойков), индикаторы АБ1 и АБ 2 (отображают момент срабатывания бойков и момент достижения предельно допустимой скорости вращения) и т.д. Это позволяет снизить аппаратные затраты, а следовательно, повысить надежность и, как следствие, достоверность (точность) измерений.
Программно-аппаратная реализация системы позволяет реализовать алгоритм устранения динамической погрешности практически без снижения быстродействия (такты измерения и вычислений запзрал- лелены). Одновременно это позволяет достоверно фиксировать достижение определенных состояний (скоростей вращения роторов) турбины и повышает надежность испытаний турбины.
Надежность испытаний повышается и за счет выдачи предупреждающих звуковых и световых сигналов и автоматического прекращения подачи пара при превышении максимально допустимой скорости вращения роторов турбины, что осуществляется с помощью исполнительного механизма, в качестве которого может быть использовано реле, через нормально разомкнутые контакты которого подается дополнительное питание на контактор автомата безопасности турбины.
Формула изобретения Система для проведения испытаний турбины, содержащая датчик оборотов, подключенный к входу формирователя импульсов, первый коммутатор, генератор опорной частоты, блок регистров памяти, блок измерения параметров вращения, два датчика срабатывания бойков автомата безопасности турбины, подключенные к входам блока
фиксации начала торможения, отличающаяся тем, что, с целью повышения надежности, она дополнительно содержит блок вычислений и фиксации состояния параметров турбины, делитель частоты, сигнальное устройство, исполнительный механизм, ключ, кнопочный переключатель и второй коммутатор, вход формирователя импульсов подключен к первому входу первого коммутатора, второй вход которого
подключен к первому выходу делителя частоты, второй выход которого подключен к первым входам блока регистров памяти и индикации и блока измерения параметров вращения, а вход- к первому входу генератора опорной частоты, второй выход которого подключен к первому входу блока вычислений и фиксации состояний параметров турбины, кнопочный переключатель подключен к входу генератора опорной частоты и вторым входам блока регистров памяти и индикации и блока вычислений и фиксации состояний параметров турбины, третий и четвертый входы последнего подключены к ключу, а пятый вход - к выходу
блока измерения параметров вращения, второй вход которого подключен к выходу первого коммутатора, третий вход которого подключен к первому выходу блока вычислений и фиксации состояний параметров
турбины, второй, третий, четвертый и пятый выходы которого подключены соответственно к третьему входу блока измерения параметров вращения, входу исполнительного механизма, входу сигнального устройства и
третьему входу блока регистров памяти и индикации, четверт ый вход последнего подключен к выходу блока фиксации начала торможения, а пятый и шестой входы - к второму коммутатору.
li
Вых.1
a
90/L9C91
BAD BAI BAl 8A3
5x1
Фиг. 7
| Авторское свидетельство СССР Ns 1195251,кл G 01 Р 3/48,1984. |
