к выходам соответствующего масштаЬирующего усилителя, а выход первогосоединен с одним из входов третьего блока умножения, другой вход которого подкл очен к выходу четвертого блока умножения, входы которого соединены соответственно с выходом второго блока умножения и выходом второго масштабирующего усилителя, вход которого и вход .первого масштабирующего усилителя являются соответственно вторым и первым входами датчика искрения под щетками тягового двигателя.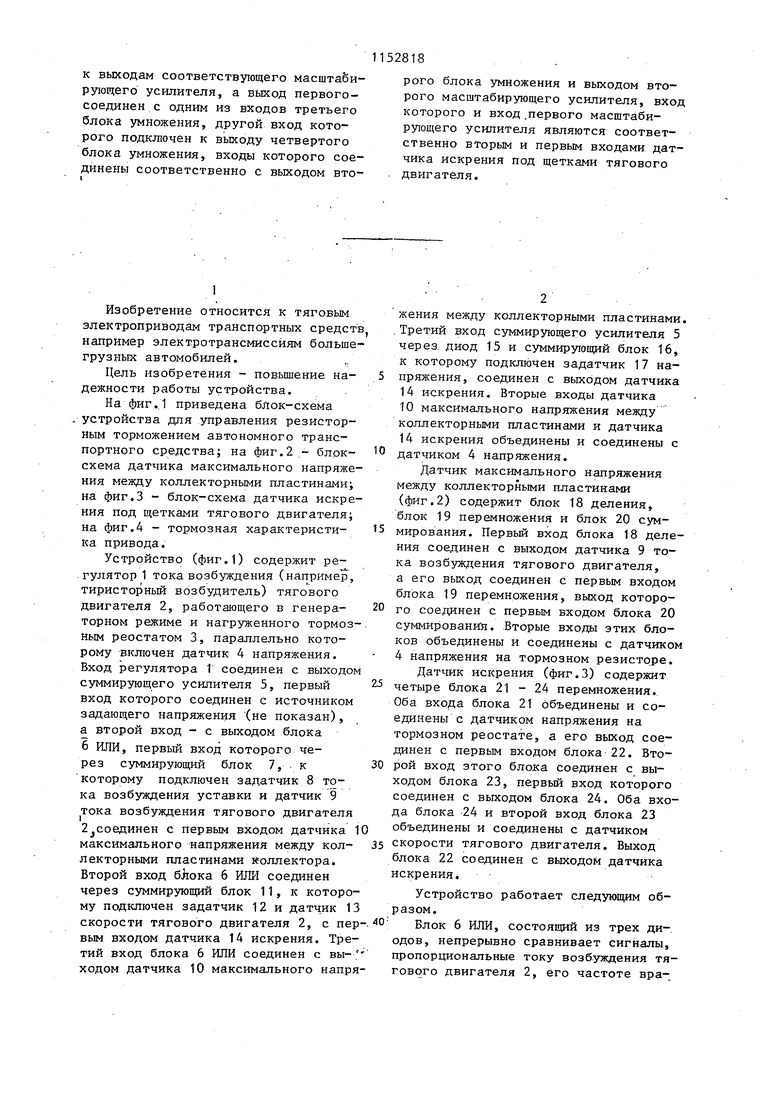
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реостатным торможением двигателей транспортного средства | 1986 |
|
SU1463546A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОДИНАМИЧЕСКОГО ТОРМОЗА ЛОКОМОТИВА | 2010 |
|
RU2432269C1 |
| Способ регулирования скорости движения тепловоза в режиме электрического торможения | 2017 |
|
RU2652481C1 |
| Устройство для динамического торможения автономного транспортного средства | 1979 |
|
SU867718A1 |
| Устройство для динамического торможения электродвигателя постоянного тока | 1976 |
|
SU647821A1 |
| Устройство для защиты от буксования и юза колесных пар электровоза | 1987 |
|
SU1438976A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ | 2001 |
|
RU2208528C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2523032C1 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕЗИСТОРНШ ТОРМОЖЕНИЕМ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА, содержащее регулятор тока возбуждения тягового двигателя постоянного тоца,, вход которого подключен к выходу суммирующего усилителя, соединенного одним входом с источником задающего сигнала, а другим - с входом блока ИЛИ, один вход которого соединен с выходом первого суммирующего блока, входы которого подключены к задатчику иодатчику угловой скорости двигателя, а другой - с выходом второго суммирующего блока, входы которого подключены к задатчику и датчику тока возбуждения тягового двигателя, а.датчик напряжения на тормозном резисторе, отличающее, с я тем, что, с целью повьше- ния надежности работы устройства, оно снабжено датчиком максимального напряжения между коллекторными пластинами тягового двигателя, датчиком искрения под щетками этого двигателя, третьим суммирующим блоком и соединенным с одним из его входов задатчиком напряжения, при этом выход третьего суммирующего блока подключен через диод к третьему входу суммирующего усилителя, а другой вход третьего суммирующего блока подключен к выходу датчика искрения под щетками двигателя, входы которого соединены с датчиком угловой скорости и датчиком напряжения, подключенным к одному из входов датчика максимального напряжения между коллекторными пластинами двигателя, другой вход которого соединен с датчиком тока возбуждения, а выход - с третьим входом блока. ИЛИ. 2. Устройство по П.1, отличающееся тем, что датчик мак(Л симального напряжения содержит блок деления, соединенные с его входами масштабирующие усилители, а с его выходом одним из входов - блок умножения, подключенный одним из входов к выходу последнего суммирующий блок, выход которого является выхо- дом датчика максимального напряжения, а другие входы блока деления и блока суммирования соединены с выходом одного из масшта рующих усилителей, вход которого и вход другого масштабирующего усилителя являются соответственно одним и другим входами датчика максимального напряжения между коллекторными пластинами двигателя.. 3. Устройство по П.1, отличающееся тем, что датчик искрения под щетками тяговогб двигателя содержит масштабирующие усилители и блоки умножения, входы первого и второго из которых подключены
1
Изобретение относится к тяговым электроприводам транспортных средств например электротрансмиссйям большегрузных автомобилей.
Цель изобретения - повьщ1ение надежности работы устройства.
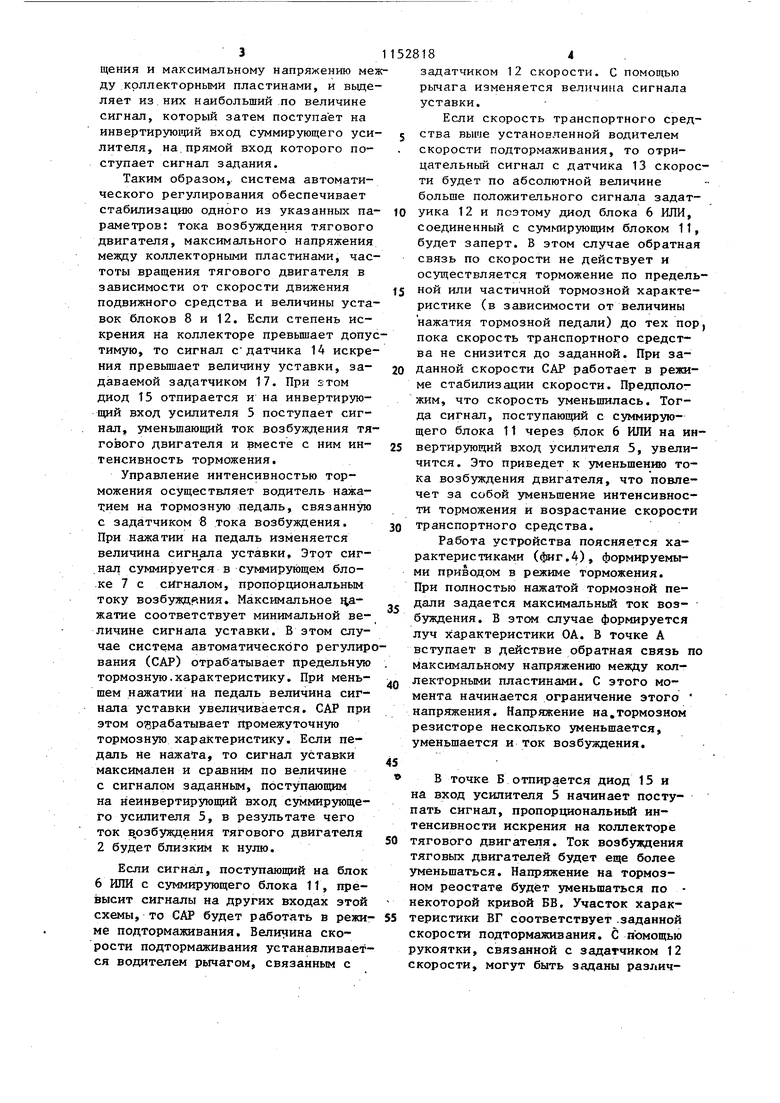
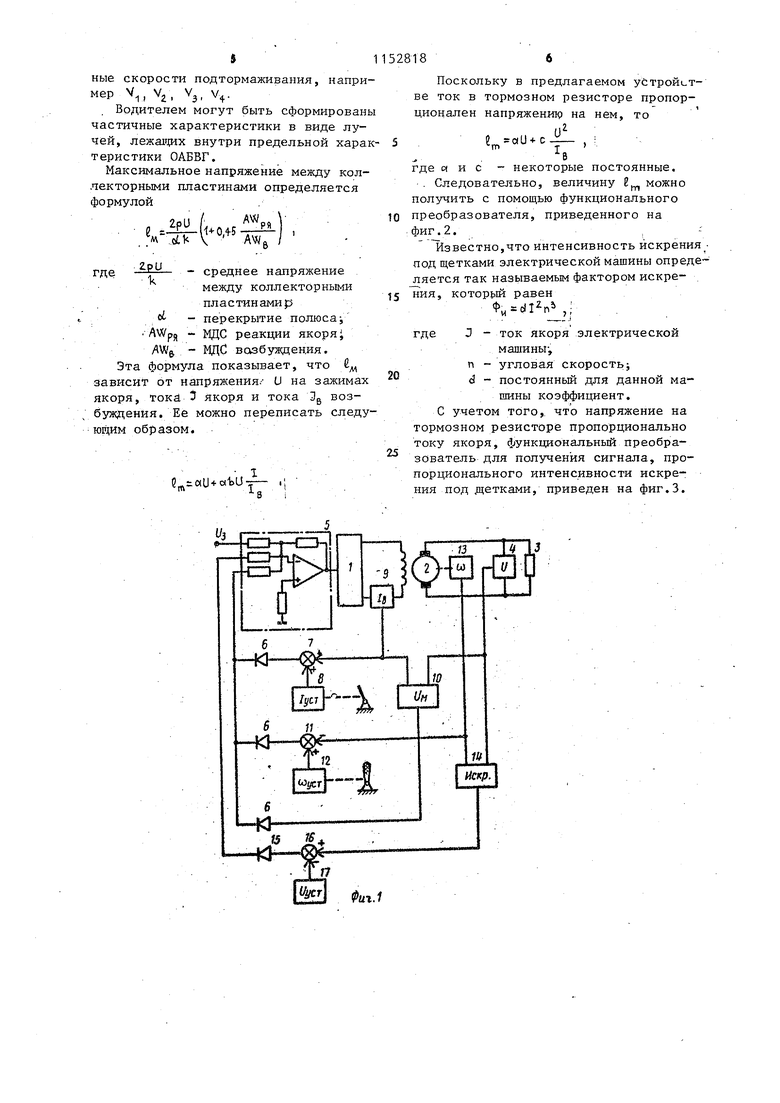
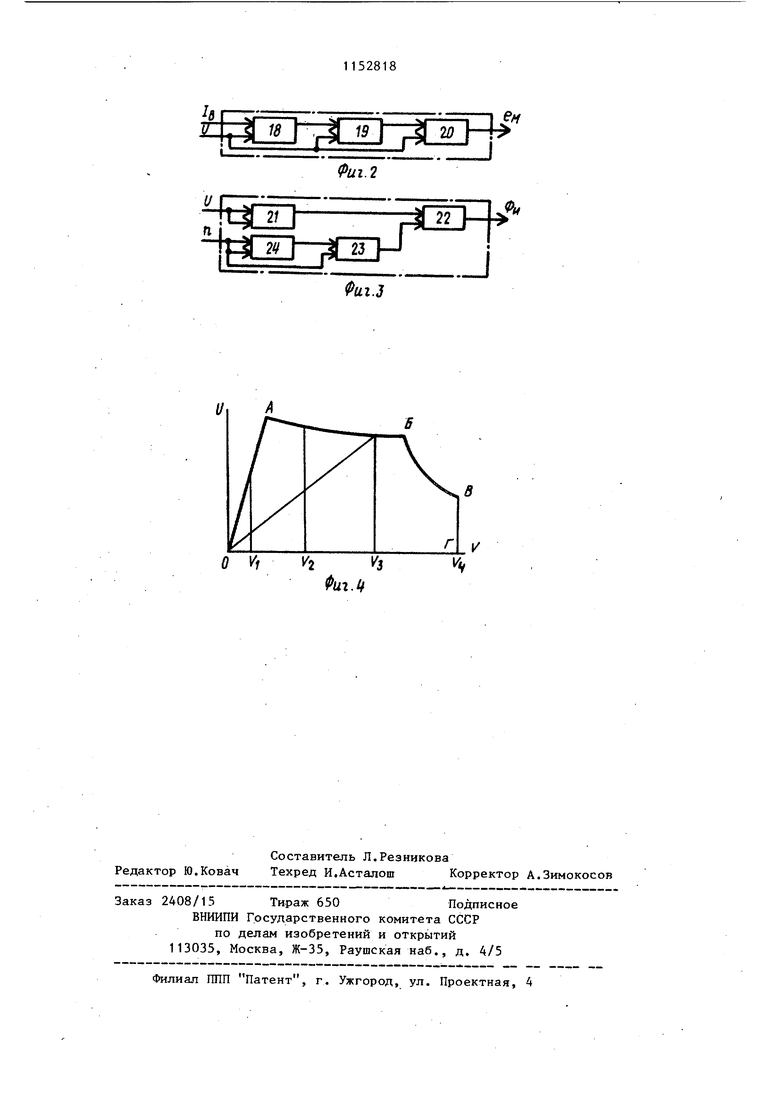
На фиг,. 1 приведена блок-схема устройства для управления резисторным торможением автономного транспортного средства; на фиг.2 - блоксхема датчика максимального напряжения между коллекторными пластинами; на фиг.З - блок-схема датчика искрения под щетками тягового двигателя; на фиг.4 - тормозная характеристика привода.
Устройство (фиг.1) содержит ре.гулятор 1 тока возбуждения (например, тиристорный возбудитель) тягового двигателя 2, работающего в генераторном режиме и нагруженного тормозНым реостатом 3, параллельно которому включен датчик 4 напряжения. Вход регулятора 1 соединен с выходом суммирующего усилителя 5, первый вход которого соединен с источником задающего напряжения (не показан), а второй вход - с выходом блока 6 ИЛИ, первый вход которого через суммирующий блок 7, к которому подключен задатчик 8 тока возбуждения уставки и датчик 9 тока возбуждения тягового двигателя 2 соединен с первым входом датчика 10 максимального напряжения между коллекторными пластинами коллектора. Второй вход 6 ИЛИ соединен через суммирующий блок 11, к которому подключен задатчик 12 и датчик 13 скорости тягового двигателя 2, с первым входом датчика 14 искрения. Третий вход блока 6 ИЛИ соединен с вы- ходом датчика 10 максимального напряжения между коллекторными пластинами Третий вход суммирующего усилителя 5 через диод 15 и суммирующий блок 16, к которому подключен задатчик 17 напряжения, соединен с выходом датчика 14 искрения. Вторые входы датчика 10 максимального напряжения между коллекторными пластинами и датчика 14 искрения объединены и соединены с датчиком 4 напряжения.
Датчик максимального напряжения между коллекторными пластинами (фиг.2) содержит блок 18 деления, блок 19 перемножения и блок 20 суммирования. Первьм вход блока 18 деления соединен с выходом датчика 9 тока возбуждения тягового двигателя, а его выход соединен с первым входом блока 19 перемножения, выход которого соединен с первым входом блока 20 суммирования. Вторые входы этих блоков объединены и соединены с датчиком 4 напряжения на тормозном резисторе.
Датчик искрения (фиг.З) содержит четыре блока 21-24 перемножения. Оба входа блока 21 объединены и соединены с датчиком напряжения на тормозном реостате, а его выход соединен с первым входом блока 22. Второй вход этого блока соединен с выходом блока 23, первый вход которого соединен с выходом блока 24. Оба входа блока 24 и второй вход блока 23 объединены и соединены с датчиком скорости тягового двигателя. Выход блока 22 соединен с выходом датчика искрения.
Устройство работает следующим образом.
Блок 6 ИЛИ, состоящий из трех диодов, непрерывно сравнивает сигналы, пропорциональные току возбуждения тягового двигателя 2, его частоте вра- щения и максимальному напряжению ме ду коллекторными пластинами, и вьще ляет из них наибольший по величине сигнал, который затем поступает на инвертирую1ций вход суммирующего у си лителя, на.прямой вход которого поступает сигнал задания. Таким образом, система автоматического регулирования обеспечивает стабилизацию одного из указанных па раметров: тока возбуждения тягового двигателя, максимального напряжения между коллекторными пластинами, час тоты вращения тягового двигателя в зависимости от скорости движения подвижного средства и величины уста вок блоков 8 и 12. Если степень искрения на коллекторе превьшает допу тимую, то сигнал Сдатчика 14 искре ния превьшает величину уставки, задаваемой задатчиком 17. При зтом диод 15 отпирается и на инвертирующий вход усилителя 5 поступает сигнал, уменьшающий ток возбуждения тя гового двигателя и вместе с ним интенсивность торможения. Управление интенсивностью тор можения осуществляет водитель нажа1;ием на тормозную педаль, связанную с задатчиком 8 тока возбуждения. При нажатии на педаль изменяется величина уставки. Этот сиг.нал суммируется в суммирующем бло.ке 7 с сигналом, пропорциональным току возбуждр.ния. Максимальное нажатие соответствует минимальной величине сигнала уставки. В зтом случае система автоматического регулир вания (САР) отрабатывает предельную тормозную.характеристику. При меньтем нажатии на педаль величина сигнала уставки увеличивается. САР при этом обрабатывает промежуточную тормозную характеристику. Если педаль не нажага, то сигнал уставки максимален и сравним по величине с сигналом заданным, поступающим на неинвертирующий вход суммирующего усилителя 5, в результате чего ток в,озбуждения тягового двигателя 2 будет близким к нулю. Если сигнал, поступающий на блок 6 ИЛИ с суммирующего блока 11, превысит сигналы на других входах этой схемы, то САР будет работать в режиме подтормаживания. Величина скорости подтормаживания устанавливается водителем рычагом, связанным с задатчиком 12 скорости, С помощью рычага изменяется величина сигнала уставки. Если скорость транспортного средства выше установленной водителем скорости подтормаживания, то отрицательный сигнал с датчика 13 скорости будет по абсолютной величине больше положительного сигнала задатуика 12 и поэтому диод блока 6 ИЛИ, соединенный с суммирующим блоком 11, будет заперт. В этом случае обратная связь по скорости не действует и осуществляется торможение по предельной или частичной тормозной характеристике (в зависимости от величины нажатия тормозной педали) до тех пор, пока скорость транспортного средства не снизится до заданной. При заданной скорости САР работает в режиме стабилизации скорости. Предположим, что скорость уменьшилась. Тогда сигнал, поступающий с суммирующего блока 11 через блок 6 ИЛИ на инвертирующий вход усилителя 5, увеличится. Это приведет к уменьшению тока возбуждения двигателя, что повлечет за собой уменьшение интенсивности торможения и возрастание скорости транспортного средства. Работа устройства поясняется характеристиками (фиг.4), формируемыми приводом в режиме торможения. При полностью нажатой тормозной педали задается максимальный ток возбуждения. В зтом случае формируется луч характеристики ОА. В точке А вступает в действие обратная связь по Максимальному напряжению между коллекторными пластинами. С этого момента начинается ограничение этого напряжения. Напряжение на,тормозном резисторе несколько уменьшается, уменьшается и ток возбуждения, В точке Б отпирается диод 15 и на вход усилителя 5 начинает поступать сигнал, пропорциональный интенсивности искрения на коллекторе тягового двигателя. Ток возбуждения тяговых двигателей будет еще более уменьшаться. Напряжение на тормозном реостате будет уменьшаться по некоторой кривой ВВ. Участок характеристики ВГ соответствует .заданной скорости подтормаживания, С помощью укоятки, связанной с задатчиком 12 корости, могут быть заданы различные скорости подтормаживания, напр 11 г . Водителем могут быть сформирова частичные характеристики в виде лу чей, лежшщх внутри предельной хар теристики ОАБВГ, Максимальное напряжение между ко лекторными пластинами определяется формулой «„(-,« СН V -среднее напряжение между коллекторными пластинамир -перекрытие полюса НДС реакции якоря; -ЩС возбуждения. Эта формула показывает, что д, зависит от напряжения.- U на зажима якоря, ТОКИ 3 якоря и тока 3g возбуждения. Ее можно переписать след ющим образом. C idU+wtU::18Поскольку в предлагаемом устройстве ток в тормозном резисторе пропорционален напряжению на нем, то e,.«u.clL,: В где С и с - некоторые постоянные. . Следовательно, величину К можно получить с помощью функционального преобразователя, приведенного на фиг.2.., Известно,что интенсивность искрения под щетками электрической машины определяется так называемым фактором искрения, которда равен ,j где 3 - ток якоря электрической машины-, п - угловая скорость; 3 - постоянньш для данной машины коэффициент. С учетом того, что напряжение на тормозном резисторе пропорционально току якоря, функциональный преобразователь для получения сигнала, проорционального интенсивности искрения под детками, приведен на фиг.З.
и
| Устройство противобоксовочной защиты | 1980 |
|
SU867717A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
