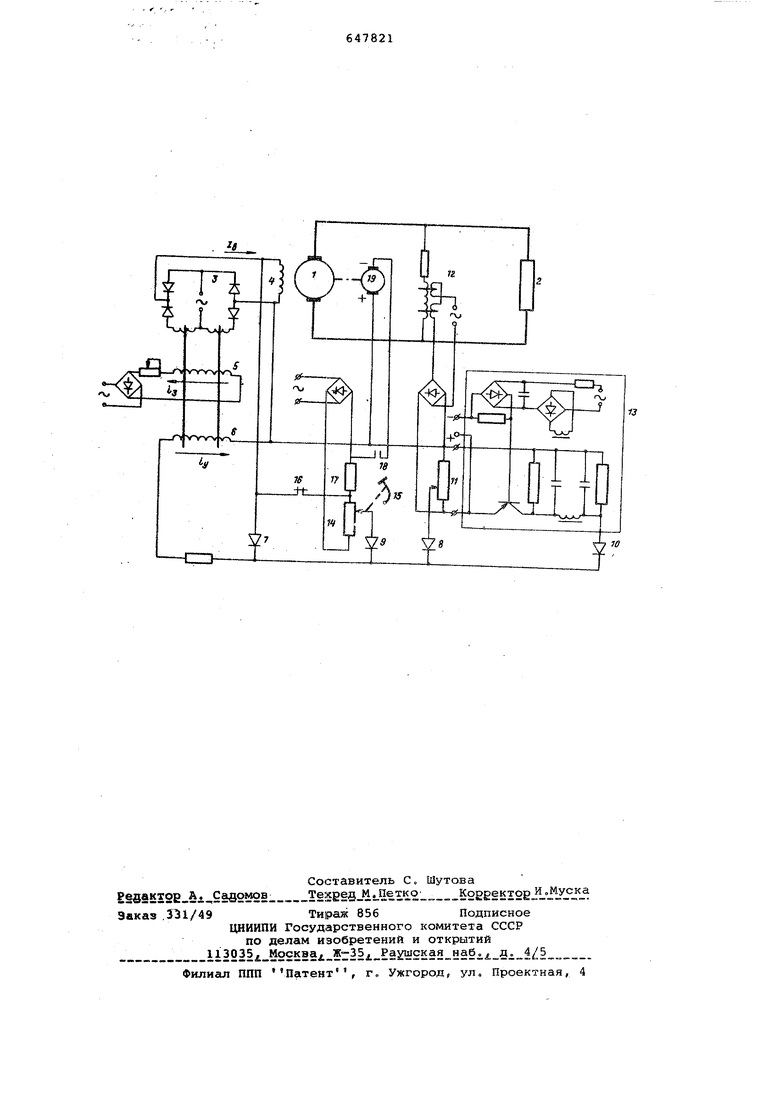
д)бгйческая диодная схема ИЛИ, со вхог дами которой соединены элементыоб|ратвых связей: датчики .тока и напря ен ия и функциональный блок перемножения, связанный с этими датчиками 2. . Применительно к режима л торможения управление в подобном устройстве осуществляется водителем путем воз- , Действия на опорный (задающий) сигнал САР, с которым сравнивается в схеме сравнения регулятора тока возбуждения двигателей сигнал обратной связи, фор мируемый логической диодной схемой ИЛИ, осу1цествля1бк11ей с равненйе сигналов датчиков обратной связи и функциональных элементов и выделяющий наибольший из них. При этом деформации подвергайтся хара1ктёристики и зоне любых ограничений. Для осуществлен ния режима подтормаживания в подобных Устройствах требуется либо применение каскадного регулирования, либо иное усложнение САР, Кроме того, не полно используется область тормозных режимов, а настройка САР оказывается весь ма( СЛОЖНОЙ. . . Цель настоящего изобретения - упр щёМиё регулй&ова1 ия и упрощение настройки. . . ..:, . поставленная цель достигается тем что оно снабжено включбнйым последовательно, с Одним из диодов элемента ИЛИ елитёлём напряжения, состоящим из регулируемой и нерегулируемой частей, параэтлельно нерёг лйруёмой . части которого через замыкающий контакт переключателя режимов подключен выход датчика частоты вращения двига Теля и через размыкающий контакт - выход датчика тока возбуждения дви ;гг1Тёля;, ; - / -- . ., На чертеже представлено устройство для динамического торможения элек тродвигателя постоянного тока. Устройство содержит регулятор тока возбуждения тя1 ового,двигателя 1, работайцег о генёр1аТорс)М на, тормозной реостат 2 - магнитный усилитель 3, управляющий током в обмотке возбужцёнйя 4 двигателя 1. Одна из о бй6Ток управления усилителя 3 - оШотКа задания 5 подключена к источнику пос тоянного сигнала, другая - обмотка упрАвЛенй я 6 - к логич ёскому Дйоййом блоку диодах. 7, 8, 9 и 10. . ... , .: -, . т. - . - J. ., - aicifjvsyn -V - f.-..--:;. Диод 7 соединён с обмоткой возоуладения двигателя 4, диод 8 - с пОтенцио метром 11, по которому протекает ток трансформатора постоянного напряжения 12. Диод 10 связан 6 выходом транзисторного. врем5 -ймпульсйргр блО ка перемножения 13, один из входов которого подключен к потенциометру 11, а другой соединен с датчиком скорости. Диод 9 соединен с движком потенциометра 14, связанным с органо управления - педалью водителя 15. По тенциометр 14 соединен контактами 16 с обмоткой, возбуждения 4 двигателя 1 и с резистором 17, а оба они присоединены к источнику напряжения. Резистор 17, кроме того, соединен контактами 18 переключателя с датчиком частоты вращения двигателя 1 - тахогенератором 19. Устройство работает следующим образом. Диодная схема ИЛИ, состоящая из четырех диодов 7, 8, 9 и 10, .непрерывно сравнивает сигналы, пропорциональные току возбуждения двигателя 1, току якоря или напряжению на тормозном реостате 2 и реактивной ЭДС двигателя с сигналом задания и выделяет из HHX наибольший по величине iy, который затем сравнивается в магнитном усилителе 3 с неизменным по величине сигналом сравнения 1.Таким образом, САР обеспечивает стабилизацию одного из указанных параметров: реактивной ЭДС, напряжения или тока возбуждения двигателя, в зависимости от скорости движения подвижного средства. . ,.-,,.. Управление интенсивностью тОрможения осуществляет йодитель нажатием на тормОзнукз педаль 15. С педалью связан движок потенциометра 14, последовательно .с которым контактами 16 переключателя соединен источник сигнала. Пропорциональный току возбужг дения двигателя 1. Этим сигналом является падение напряжения на обмотке возбуждения 4. При максимальном нажатии педали движок потенциометра 14 находится в верхнем положении и последов аТейьнр с логическим диодом 9 оказывается; екйюч:енным только источник , пропорциональный DgПри этом ц йочка с диодом 9 просто дублирует цепочку с диодом 7 и САР ОтрйбаТйвШт предельную тормозную х.арактеристйку при Зз , равном максимально допустимому. При менЫием нажатии на педаль дШижок 14 находится в промежуточном положении и последовательно с источником сигнала, пропорциональным 3 в .включается управляющий сигнал, величина КОТОРОГО тем больше, чем меньше угол нажатия педали. САР при этом Отрабатывает промежуточную тормозную характеристику с меньшим Зв- Если педаль не нажата, движок 14 находится в крайнем нижнем положении. Сигнал управления максимален и сравним по ззеличйне с сигналом сравнения ч 4 i в результате чего магнитный усилитель 3 оказывается в режиме, к холостому ходу, а ток возёуясдёния двигателя близким к нулю. Для перехода САР в режим подтормаживанйя меняют положение переключателя егоконтакты 2Ь раз-мыкаются, а контакты 18 замыкаютсй, вследствие чего к потенциометру 14 и соединенному с ним резистору 17 контактами 18 подключается встречно ис точник сигнала, пропорциональный ско рости, - тахргейератор 19. При максимальном нажатии тормозной педали в цепи диода 9 оказываются последовательно включенными нерёгулируемый сигнал управления (паление напряжения на резисторе 17) и встречно с ним - сигнал, пропорциональный скорости. Величина нерегулируемого сигнала управления такова, что даже при низкой скорости движения он меньше остальных сравниваемых схемой ИЛИ сигналов и не оказывает влияния на работу САР, которая при этом отрабатывает предельную тормозную характеристику вплоть до останов ки. .... При мейьшем нажатии сигнал управления увеличивается за счет падения напряжения на части потенциометра 14 При больших скоростях суммарный сигнал в цепи диода 9 мал, но.со снижением скорости в результате торможения по предельной характеристике он растет, пока при некоторой скорЬсти не становится превалирующим. Тогда САР начинает работать в режиме стабилизации скорости , увеличивая тормозную силу при увеличении скорости и снижая при ее уменьшении тормозную силу до нуля. С уменьшением угла нажатия на педалЬ стабилизируемай скорость растет до максимально допустимой при нажатой педали. Таким образом обеспечивается полу чение предельных и частичных TOFWCJSных характеристик в режиме торМожекия и характер1Истйк стабилизации заданных скоростей в пределах тех же ограничений в режиме подтб эмаживания Сигнал, пропорциональный реактивной ЭДС формируется, как показано на чертеже, с пряненением время-импульс ного множительного устройства (с фильтром на выводе) , осуществлянзадего операцию перемножения сигналив, порциональных аапряжениго и угловой скорости двигателя 1. В случае не обходимостй аналогично формируется сигнал, пропорциональный коммутацион ной ЭДС, перемножением сигналов, пропорциональных токам якоря и врабуждения двигателем. Указанное соединение злементов обратной связи и управления позволяет 3Ha4HT€uibHO упростить САР, простыми средствами обеспечить ее функционирование в обоих режимах (тормозном и подтормаживания) при одйовременном улучшении использования тормозной области благодаря непрерывному отслеживанию ограничений во всех тормозных режимах. Система весьма проста в наладке и допускает изменение структуры для получения других требуемых характеристик простейшими средствами. Система автоматического регулирования может найти применение не только в приводах тепловозов, автопоездов и других автономных системах, но и в любых П1)иводах постоянного тока с иными программами регулирования в режиме торможения. Формула изобретения Устройство для динамического ТОЕ можения электродвигателя постоянного тока, содержащее регулятор тока возбуждения двигателя, подключенный к выходу блока сравнения, один вход которого соединен с истрчником задающего сигнала, а другой - с выходом элемента ИЛИ, выполненного в виде , нескрльких параллельно соединенных диодов по числу регулируеквлк параметров, датчики тока возбуждения и частоты вращения двигателя и переключатель режимов, отличающ е е с я тем, что, с целью упрощения и облегчения настройки устрой ства, оно снаб.жено включенным последовательно с Ъдним из диодов элемента ИЛИ делителем напряжения, состоящим из регулируемой и нерегулируемой частей, параллельно нерегулируемой части которого через замыкающий контакт переключателя режимов подключен выход датчика частоты вращения двигателя и через размыкакндий контйкт-выход датчика тока возбуждения двигателя. Источники информации, принятые во внимание при экспертизе:1.патент CtflA 3263142, кл. 31899, 1970. 2.Авторское свидетельство СССР № 383187, кл. Н 02 Р 5/22, 1964.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамического торможения электродвигателя постоянного тока | 1978 |
|
SU694963A2 |
| Устройство для управления резисторным торможением автономного транспортного средства | 1983 |
|
SU1152818A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU780132A1 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВИГАТЕЛЕМ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2352052C2 |
| Устройство для управления транспортным средством | 1986 |
|
SU1402452A1 |
| Устройство для динамического торможения автономного транспортного средства | 1979 |
|
SU867718A1 |
| Способ управления приводом электромобиля и устройство для его осуществления | 2018 |
|
RU2709639C1 |
| Устройство для регулирования режима торможения транспортного средства | 1978 |
|
SU746410A1 |
| Привод транспортного средства | 1985 |
|
SU1404383A1 |
| Устройство для управления электроприводом электромобиля | 1979 |
|
SU921898A1 |