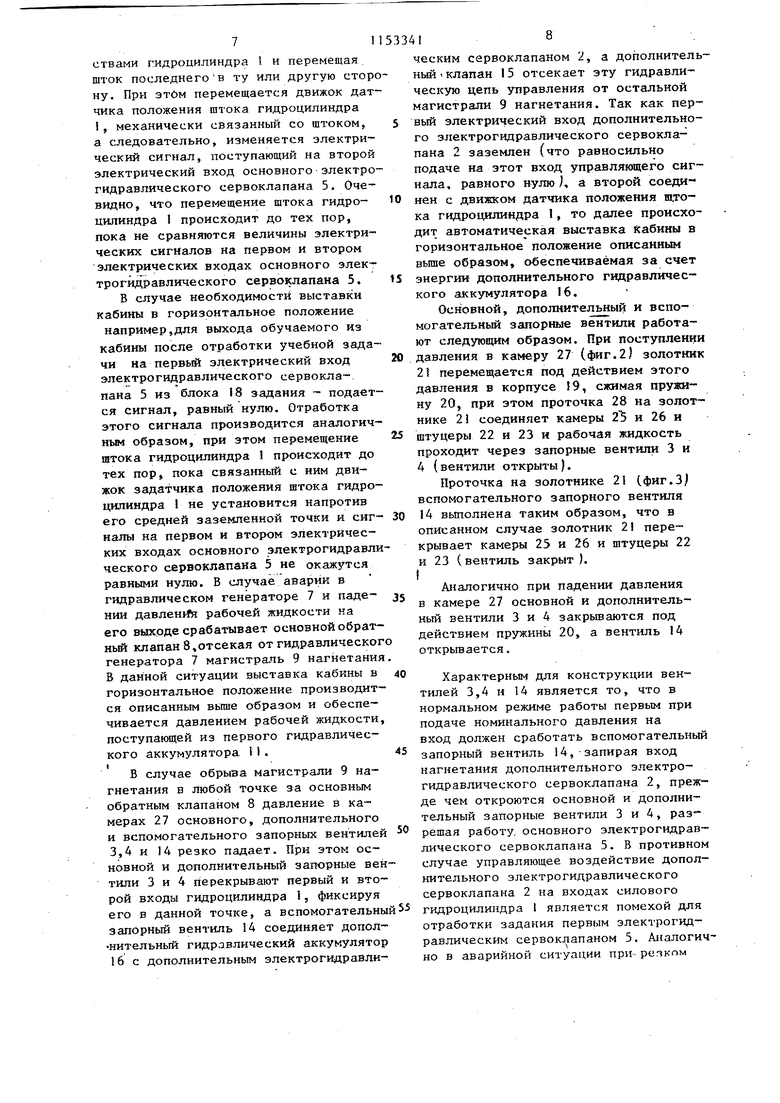
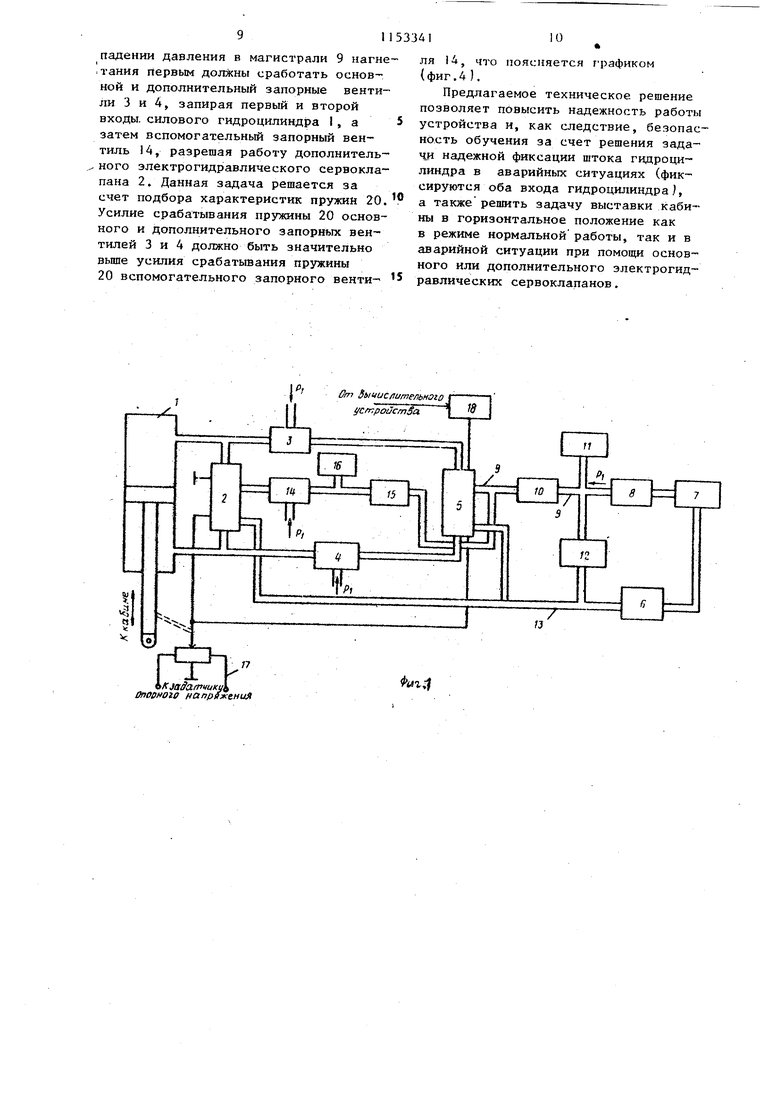
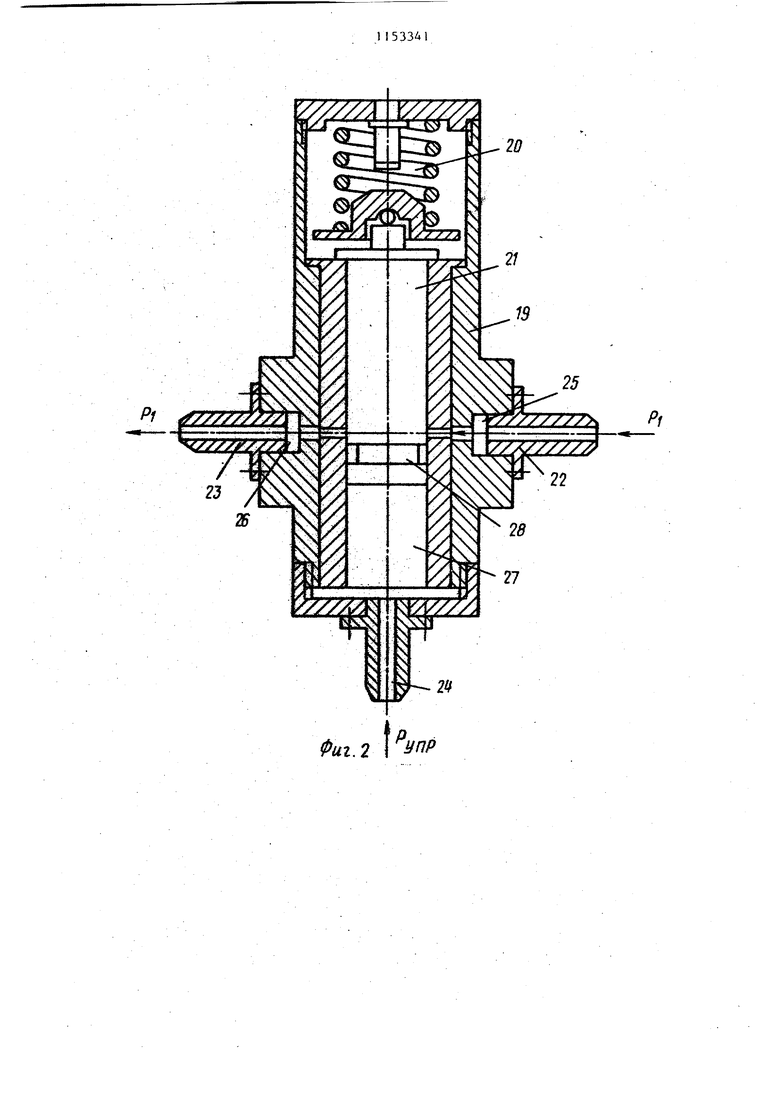
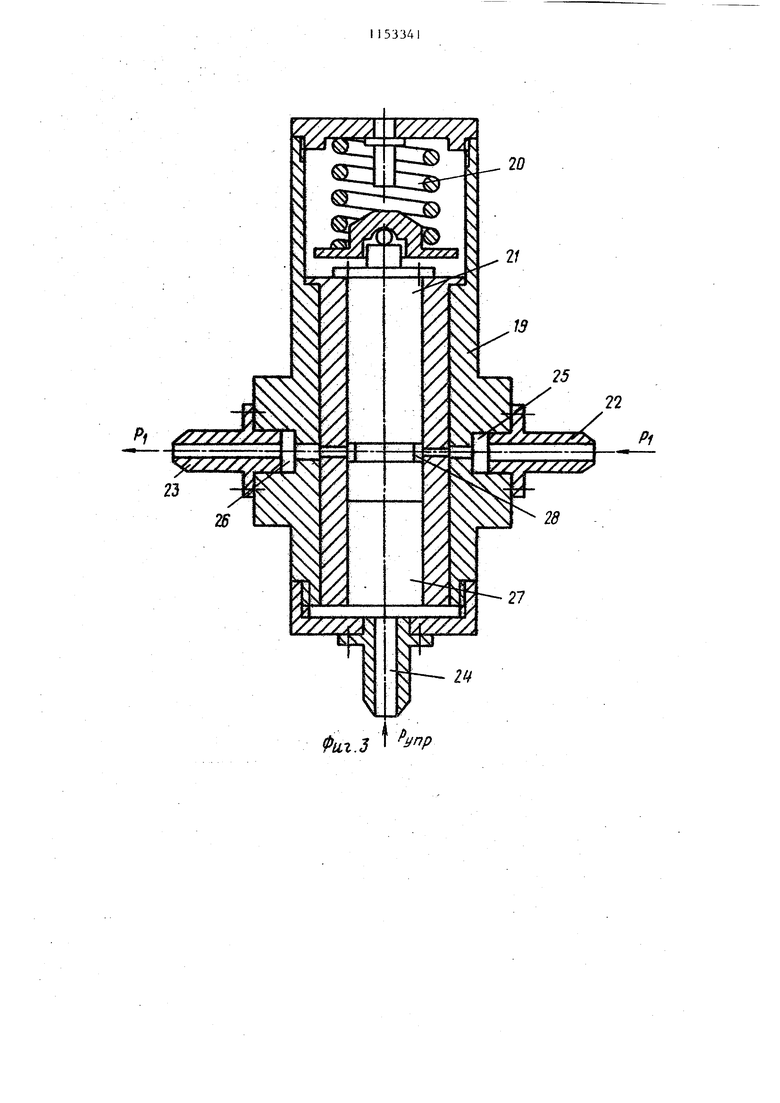
Изобретение относится к устройствам управления движением кабины тренажеров трайспортных средств и может быть использовано в имитаторе акцел рационной информации тренажера для управления движением силового привода кабины тренажера и в составе последнего - для обучения персона ла воясденшо транспортного средства. Наиболее близким к предлагаемому является устройство управления движением кабины тренажера, содержащее гидроцилиндр, сливной бак, основной электрогидравлический сервоклапан, имеюищй два вьпсода и входа, при этом один выход через основной запор ный вентиль сообщен с запоршневым пространством гидроцилиндра, а вхо ды - соответственно с магистралями нагнетания и слива, подключенный к выходной магистрали бака гедравличес кий генератору выход которого через магистраль нагнетания, в которой последовательно установлены основной обратный клапан и фильтр, соединен с упомянутым основным электрогидравли ческим сервоклапаном, основные гидравлический аккумулятор и перепускной вентиль, подсоединенные к магист рали нагнетания между фильтром и обратным клапаном, при этом выход о новного перепускного вентиля через магистраль слива связан с баком, по- тенциометрический датчик положения штока гидроцилиндра, движок которого механически соединен с штоком гидроцилиндра, а электрически - с основным электрическим входом основного сервоклапана, причем средняя -точка датчика заземлена, а крайние выводы подключены к задатчику опорного напря жения, при этом дополнительный электрический вход сервоклапана подключе к блоку управления С 1 ( Недостаток известного устройств заключается в том, что запорный вен тиль в случае аварии в магистрали нагнетания запирает только эту магистраль, оставляя открытой магистрал слива, и поэтому кабина тренажера, осуществляя давление (собственньм в сом ) на шток гидроцилиндра, перемещает его. В случае совпадениянапра ления движения кабины до момента аварии с направлением действия силы тяжести кабины, скорость указанного перемещения значительна и приводит к удару, что может нежелательИо отразиться на конструкции гидроцилиндра и привести к травме обучаемого. Кроме TorOj в известном устройстве в случае аварии отсутствует возможность выставки кабины в горизонтальное положение, так как в случае обрыва магистрали нагнетания (например, между фильтром и сервоклапаном / сервоклапан и гидроцилиндр оказываются отрезанными от аккумулятора и гидравлического генератора, следовательно, отсутствует сила, способная привести кабину в горизонтальное положение. Цель изобретения - повьшение надежности устройства за счет устранения аварийных ситуаций. Поставленная цель достиг.ается тем,- что устройство управления движением кабины тренажера, содержащее гидроцилиндр, сливной бак, основной электрогидравлический сервоклапан, имеющий два выхода и входа, при этом один выход через основной запорный вентиль сообщен с запоршневым пространством гидроцилиндра, а входы соответственно с магистралями нагнетания и слива, подключенный к выходной магистрали бака гидравлический генератор, выход которого через магистраль нагнетания, в которой последовательно установлены основной обратный клапан и фильтр, соединен с упомянутым основным электрогидравлическим сервоклапаном, основные гидравлический аккумулятор и перепускной вентиль, подсоединенные к магистрали нагнетания между фильтром и обратным клапаном, при этом выход основного перепускного вентиля через магистраль слива связан с баком, потенциометрический датчик положения штока гидроцилиндра, движок которого механически соединен с штс.ом гидроцилиндра, а электрически с первым электрическим входом основного электрогидравли- ческого сервоклапана, причем средняя точка лотенциометрического датчика заземлена, а крайние выводы подключены к задатчику опорного напряжения, при этом второй электрический вход сервоклапана подключен к блоку управления, снабжено дополнительными вентилем и электрогидравлическим сервоклапаном, один выход которого соединен с запоршневым пространством гидроцилиндра, а другой - с предпоршневым и через дополнительный вентиль с первым входом основного электрогидравлического сервоклапана,при этом 3 один электрический вход дополните.иьного электрогидравлического сервоклапана связан с движком потенциомет рического датчика, а второй заземлен причем фильтр и вход дополнительного сервоклапана связаны дополнительной магистралью нагнетания с последовательно расположенными в ней дополнительным обратным клапаном и вспомогательным запорным вентилем, между которыми подключен дополнительный гидравлический аккумулятор, при этом второй вход дополнительного сервокла пана соединен посредством сливной магистрали с баком. Предлагаемое техническое решение позволяет решить задачу фиксации штока гидроцилиндра при повреждении магистрали нагнетания, исключая даль нейшее перемещение кабины даже в случае совпадения направления силы, действующей на шток гидроцилиндра, и силы тяжести кабины тренажера при помощи второго запорного вентиля в цепи слива ( второй вход гидроцилиндра ). Кроме того, данное решение позволяет в аварийной ситуации и в нор мальном режиме работы решить задачу выставки в горизонтальное положение кабины при помощи электрогидравлической цепи управления, состоящей из второго электрогидравлическогр серво клапана, третьего запорного вентиля, второго обратного клапана, второго аккумулятора. На фиг.1 изображена блок-схема устройства на фиг.2 - конструктивное выполнение основного и дополнительного запорных вентилей; на фиг.З конструктивное выполнение вспомогат тельного запорного вентиля; на фиг.4 график работы запорных вентилей. Устройство управления движением кабины тренажера содержит гидооцилинд 1.дополнительный электрогидравлический сервоклапан 2, выходы которого пoдк дачeны к входам гидроцшшндра 1 и через основной 3 и дополнительный 4 запорные вентили - к соответствующим выходам основного электрогидравлического сервоклапана 5, бак 6, гидравлический генератор 7, вход которого подсоединен к выходу бака 6, а выход через основной обратный клапан 8 - к магистрали 9 нагнетания, фильтр 10, установленный в магистрал 9 нагнетания между основным обратным клапаном 8 и первым входом основного 414 электрогидравлического сервоклапана 5, основной гидравлический аккумулятор 11, подключенный к магистрали 9 нагнетания между основным обратным клапаном 8 и фильтром 10, перепускной вентиль 12, вход которого подключен к магистрали 9 нагнетания между обратным клапаном 8 и фильтром 10, а выход - через магистраль 13 слива в бак 6. При этом магистраль 13 слива соединяет бак 7 с вторым входом основного электрогидравлического сервоклапана 5 и с вторым входом дополнительного электрогидравлического клапана2. Первый вход дополнительного электрогидравлического клапана 2 через последовательно соединенные вспомогательный запорный вентиль 14 и дополнительный обратный клапан 15 подсоединен к магистрали 9 нагнетания. Между электрогидравлическим сервоклапаном 2 и обратным клапаном 15 к мат гистрали 9 нагнетания подключен дополнительный гидравлический аккумулятор 16. Шток гидроцилиндра 1 механически связан с движком потенциометрического датчика 17. С этого движка электрический сигнал поступает на первые электрические входы основного и вспомогательного электрогидравлических сервоклапанов 5 и 2. Средняя точка потенциометрического датчика заземлена, а крайние подключены к задатчику опорного напряжения (не показан ). Второй электрический вход дополнительного электрогидравлического сервокла- пана 2 заземлен, а на второй электрический вход основного электрогидравлического сервоклапана 5 подается сигнал с блока 18 задания. Основной и дополнительный запорные вентили 3 и 4 содержат корпус 19, внутри которого установлена пружина 20, опирающаяся с одной стороны на торцовую стенку корпуса 19, а с/другой - на золотник 21. В корпусе установлены три штуцера 22, 23 и 24, соединенные с камерами 25, 26 и 27 соответственно . На золотнике 21 выполнена проточка 28, которая при перемещении золотника 21 может соединять камеру 25 с камерой 26, соединяя тем самым каналы штуцеров 22 и 23, т.е. открывая запорный вентиль. Конструкция вспомогательного запорного вентиля 14 (фиг.З) аналогична конструкции основного и дополни тельного запорньпс вентилей 3 и 4 и отличается от них только расположением проточки 28 на золотнике 21 и жесткостью пружины 20, при этом усилие срабатывания вспомогательного запорного вентиля 14 F намного мен ше усилия срабатьшания F основного и дополнительного запорных вентилей 3 и 4. Конструктивная реализация устройства возможна на основе как серийно выпускаемых, так и оригинальных конструктивных элементов. Так, в качестве гидроцилиндра I могут быть использованы гидроцилиндры, применяемые в стенде динамическом тренажера КТС ТУ-144 Ш1И КТС , или гидроцйлиидры БУ-170, и т.д., в качестве электрогидравлических сервоклапанов 5 и 2 клапаны управления, применяемые в рулевых агрегатах РА-5ВП. В качестве обратных клапанов 8 и 15 могут быть примеИены обратные клапаны типа 67I800 самолета ТУ-124, as качестве фильтра 10 - фильтр 22ГФ-10БИ самолета АН -10. В качестве гидравлических аккумуляторов 11 и 16 могут быт применены аккумуляторы типа 124-5898-150 самолета ТУ-Г24, а в качестве перепускного вентиля 12 - пр дохранительный клапан типа ГА186М самолета АН-10 СТУ. В качестве бака 6 может быть применен бак типа У5612-0 самолета ТУ-124, а в качест ве первого и второго запорных венти лей 3 и 4 - отсечные клапаны самоле та либо вентили, конструкция которых приведена на фиг.2. В качестве датчика положения што ка гидроцилиндра 1 могут быть испол зованы датчики, применяемые в стенд динамического тренажера КТС ТУ-144 или КТС ТУ-154Б. В качестве гидравлического генератора может быть использована гидравлическая станция Волна либо насос типа 435Ф, либо станция гидронасосная С72.962.000. Блок 18 задания в составе тренажера представляет собой устройство, вклю чающее вычислительную машину с запрограммированной моделью пространственного движения объекта, соедине ную с датчиками положения органов управления кабины имитируемого объекта и через устройство сопряжения .- с основным сервоклапаном. В качестве такого блока задания может быть приметрогидравлического сервоклапана 5, соединяя магистраль 9 нагнетания с предпоршневым и запоршневым простран1нено устройство управления стендом динамическим, разработанное ОКТБ с СП ИМФ АН УССР (С71.899.000 / или аналогичные устройства управления из тренажеров КТС ТУ-154 или КТС ТУ-144. Устройство работает следующим образом. Гидравлический генератор 7перекачивает рабочую жидкость из бака 6 в магистраль 9 нагнетания. При достижении давлением определенного значения (например 0,3 Рнв« э выходе гидравлического генератора открываются основной и дополнительный обратные клапаны 8 и 15 и рабочая жидкость поступает на основной и дополнительный аккумуляторы I1 и 16 и через фильтр 10 - на первый вход основного электрогидравлического сервоклапана 5, а также на основной, дополнительный и вспомогательный запорные вентили 3,4 и 14, которые срабатывают по достижении давлением определенного значения в магистрали 9 нагнетания. При этом основной и дополнительный запорные вентили 3 и 4 открывают каналы, соединякяцие выходы основного электрогидравлического сервоклапана 5 с входами гидроцилиндра, а вспомогательный запорный вентиль 14 отсекает от магистрали 9 нагнетания дополнительный электрогидравлический сервоклапан 2. В случав превышения давлением в магистрали 9 нагнетания номинального срабатывает перепускной вентиль 12, соеди- . няя магистраль 9 нагнетания с магистралью 13 слива и баком 6. После спада давления до номинального перепускной вентиль 12 отсекает магистраль 9 нагнетания от магистрали 3 слива и бака 6. В описанном состоянии устройство готово к отработке управляющего сигнала, который поступает на первый электрический вход основного электрогидравлического сервоклапана 5 из блока 18 задания и сравнивается с электрическим сигналом, поступающим на второй электрический вход от датчика положения штока гидроцилиндра J. Результирующий электрический сигнал управления управляет золотниковым ме55 ханизмом (не показан/ основного элекствами гидроцилиндра 1 и перемещая шток последнегов ту или другую стор ну. При этом перемещается движок дат чика положения штока гидроцилиндра , механически связанный со штоком, а следовательно, изменяется электрический сигнал, поступающий на второй электрический вход основного электро гидравлического сервоклапана 5. Очевидно, что перемещение штока гидро- цилиндра 1 происходит до тех пор, пока не сравняются величины электрических сигналов на первом и втором электрических входах основного элек- трогидравлического сервоклапана 5. В случае необходимости выставки кабины в горизонтальное положение например,для выхода обучаемого из кабины после отработки учебной задачи на первый электрический вход электрогидравлического сервокла-. пана 5 из блока 18 задания -- подает ся сигнал, равный нулю. Отработка этого сигнала производится анашогичньм образом, при этом перемещение штока гидроцилиндра 1 происходит до тех пор, пока связанный с ним движок задатчика положения штока гидроцилиндра I не установится напротив его средней заземленной точки и сигналы на первом и втором электрических входах основного электрогидравли ческого сервоклапана 5 не окажутся равными нулю. В случае аварии в гидравлическом генераторе 7 и падеНИИ давления рабочей жидкости на его выходе срабатывает основной обрат ный клапан 8,отсекая от гидравлическог генератора 7 магистраль 9 нагнетания В данной ситуации выставка кабины в горизонтальное положение производится описанным вьпне образом и обеспечивается давлением рабочей жидкости поступающей из первого гидравлического аккумулятора VI. В случае обрьша магистрали 9 нагнетания в любой точке за основным обратным клапаном 8 давление в камерах 27 основного, дополнительного и вспомогательного запорных вентилей 3,4 и 1Д резко падает. При этом основной и дополнительнь й запорные вен тили 3 и 4 перекрывают первый и второй входы гидроцилиндра 1, фиксируя его в данной точке, а вспомогательны запорный вентиль 14 соединяет дополнительный гидравлический аккумулятор 16 с дополнительным электрогидравли41оческим сервоклапаном 2, а дополнительный клапан 15 отсекает эту гидравлическую цепь управления от остальной магистрали 9 нагнетания. Так как первый электрический вход дополнительного электрогидравлического сервокла-пана 2 заземлен (что равносильно подаче на этот вход управлякмцего сигнала, равного нулю , а второй соединен с движком датчика положения штока гидроцилиндра 1, то далее происходит автоматическая выставка Кабины в горизонтальное положение описанным вьше образом, обеспечиваемая за счет энергии дополнительного гидравлического аккумулятора 16, Основной, дополнительный и вспомогательный запоршле вентили работают следующим образом. При поступлении давления в камеру 27 (фиг.2) золотник 21 перемещается под действием этого давления в корпусе 19, сжимая пружину 20, при этом проточка 28 на золотнике 21 соединяет камеры 2 и 26 и штуцеры 22 и 23 и рабочая жидкость проходит через запорные вентили 3 и 4 (вентили открыты). Проточка на золотнике 21 (фиг.З вспомогательного запорного вентиля 14 вьтолнена таким образом, что в описанном случае золотник 21 перекрывает камеры 25 и 26 и штуцеры 22 и 23 (вентиль закрыт ). I Аналогично при падении давления в камере 27 основной и дополнительный вентили 3 и 4 закрьшаштся под действием пружины 20, а вентиль 14 открьшается. Характерным для конструкции вентилей 3,4 и 14 является то, что в нормальном режиме работы первым при подаче номинального давления на вход должен сработать вспомогательный запорный вентиль 14, запирая вход нагнетания дополнительного электро- гидравлического сервоклапана 2, прежде чем откроются основной и дополнительный запорные вентили 3 и 4, разрешая работу, основного электрогидрав- лического сервоклапана 5. Б противном случае управляющее воздействие дополнительного электрогидравлического сервоклапана 2 на входах силового гидроцилиндра 1 является помехой для отработки задания первым электрогид- равлическим сервоклапаном 5. Аналогично в аварийной ситуации при репком
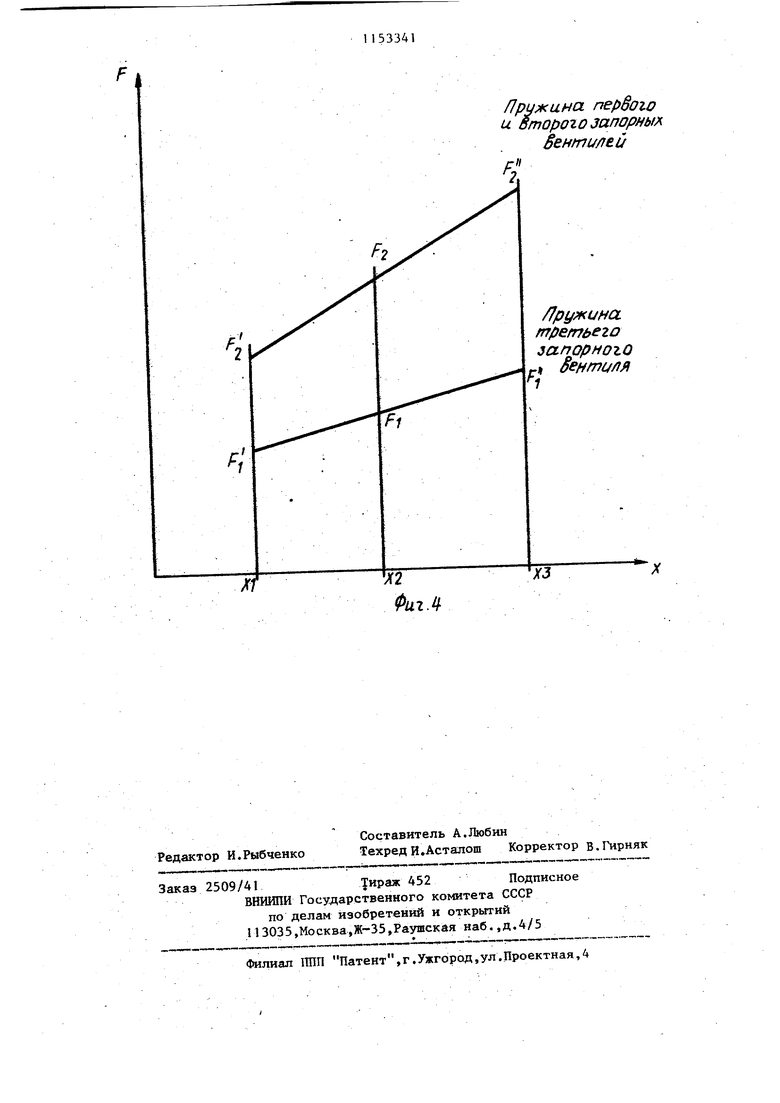
падении давления в магистрали 9 нагне.гания первым должны сработать основной и дополнительный запорные вентили 3 и 4, запирая первый и второй входы, силового гидроцилиндра I, а затем вспомогательный запорный вентиль 14, разрешая работу дополнительного электрогидравлического сервоклапана 2. Данная задача решается за счет подбора характеристик пружин 20. Усилие срабатывания пружины 20 основного и дополнительного запорных вентилей 3 и 4 должно быть значительно вьшге усилия срабатывания пружины 20 вспомогательного запорного венти-ля 14, что поясняется графиком (фиг.4 ).
Предлагаемое техническое решение позволяет повысить надежность работы устройства и, как следствие, безопасность обучения за счет решения задач и надежной фиксации штока гидроцилиндра в аварийных ситуациях (фиксируются оба входа гидроцшшндра ), а также решить задачу выставки кабины в горизонтальное положение как в режиме нормальной работы, так и в аварийной ситуации при помощи основного или дополнительного злектрогидравлических сервоклапанов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для обучения персонала транспортных средств | 1984 |
|
SU1163346A1 |
| ВИБРОСТЕНД ИСПЫТАТЕЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2398198C1 |
| ПРЕДВАРИТЕЛЬНО УПРАВЛЯЕМЫЙ СЕРВОКЛАПАН | 1994 |
|
RU2124666C1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО СОЛНЕЧНОГО ТРЕКЕРА | 2021 |
|
RU2769457C1 |
| Предохранительное устройство | 1980 |
|
SU1048223A1 |
| Натяжное устройство для ленточного конвейера | 1978 |
|
SU785142A2 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПОДАЧИ ПАРА К ПАРОВОЙ ТУРБИНЕ | 1991 |
|
RU2039297C1 |
| Гидравлическая система | 1980 |
|
SU887819A1 |
| Нагружающее устройство для испытания судовой рулевой машины | 1983 |
|
SU1111936A1 |
| ВСЕСОЮЗНАЯ ПАТЕНТНв-ТЕХНИЧЕГКДЯБИБЛИОТЕКА | 1971 |
|
SU289569A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КАБИНЫ ТРЕНАЖЕРА, содержащее гидроцилиндр, сливной бак, основной электрогидравлический сервоклапан, имеющий два выхода и входа, при этом один выход через основной запорный вентиль сообщен с запоршневым пространством гидроцилиндра, а входы соответственно с магистралями нагнетания и слива, подключенный к выходной магистрали бака гидравлический генератор, выход которого через магистраль нагнетания, в которой последовательно установлены основной обратный клапан и фильтр, соединен с упомянутым основным электрогидравлическим сервоклапаном,основные гидравлический аккумулятор и перепускной вентиль, подсоединенные к магистрали нагнетания между фильтром и обратным клапаном, при этом выход основного перепускного вентиля через магистраль слива связан с баком, потенциометрический датчик положения штока гидроцялиндра, движок которого механически соединен с штоком гидроцилиндра, а электрически - с первым электрическим входом основного электрогидравлического сервоклапана. Причем средняя точка потенциометрического датчика заземлена, а крайние выводы подключены к задатчику опорного напряжения, при этом второй электрический вход сервоклапана подключен к блоку управления, отличающееся тем, что, с целью повьшения надежности устройства, оно снабжено дополнительными вентилем и электрогидравлическим сервоклапаном, один выход которого соединен с запоршневым пространством :: градроцилиндра, а другой - с предпорсл шневым и через дополнительный венс: тиль - с первым входом основного электрогйдравлического сервоклапана, при этом один электрический вход дополнительного электрогидравлического сервоклапана связан с движком потен- циометрического датчика, а второй СП заземпен, причем фильтр и вход доСдд СО 4 полнительного сервоклапана связаны дополнительной магистралью нагнета- ния с последовательно расположенными в ней дополнительным обратным клапаном и вспомогательным запорным вентилем, между которыми подключен дополнительный гидравлический аккумулятор, при этом второй вход дополнительного сервоклапана соединен посредством сливной магистрали с баком.
,1
Фиг.1 УПР
Фаг.д f
;
Л
первого и вто(зого запорные
Вентиле, и
/Пружина третьего запорного - аентс/ля
ХЗ
П Фиг Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
