Изобретение относится к обучающим устройствам, в частности к имитаторам акцелерационной информации тренажероЕ транспортных средств, и может быть использовано в составе последних для имитации движения транспортного средства.
Цель изобретения - повьппение эффективности обучения,.
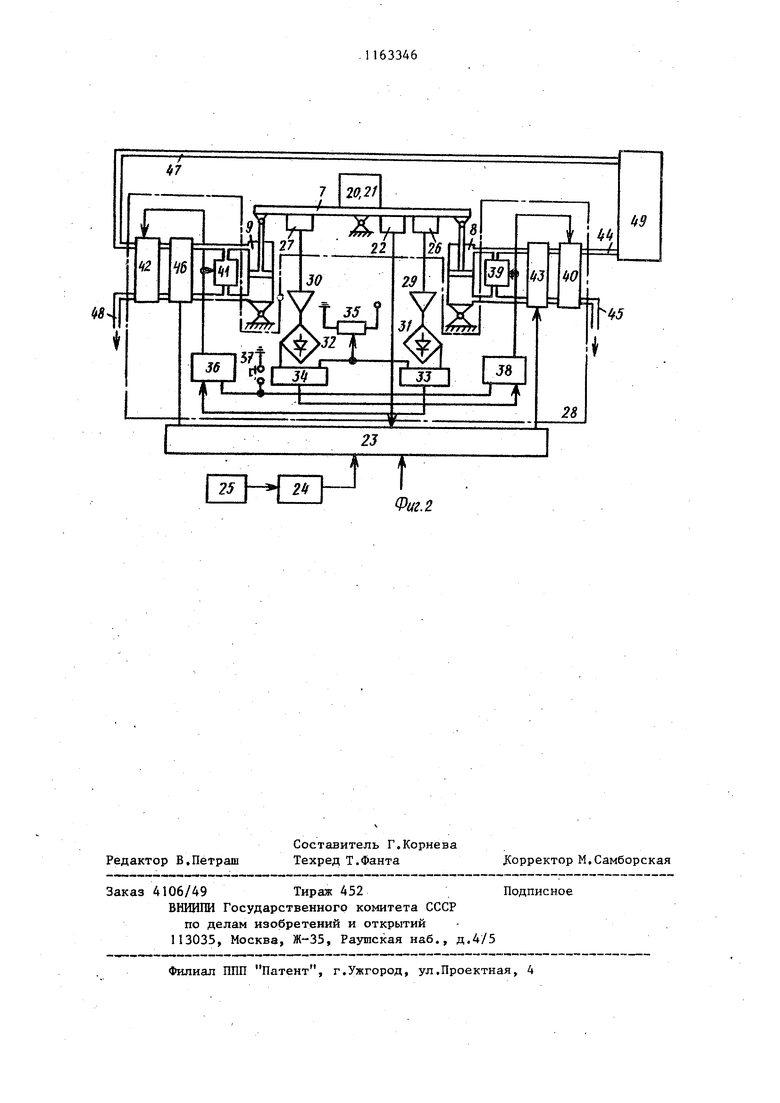
На фиг„ 1 изображен тренажер, об щий ВИД1 на фиг. 2 - функциональная схема блока управления по одной из координат, например крену.
В представленном на фиг. 1 тренажере в качестве приводов применены падравлические приводы, что определяет элементную базу блока управления приводами В случае применения в качестве исполнительных механиз- нов электрических приводов блок управления может быть представлен на базе электрических элементов.
Тренажер состоит из рамы 1 (фиг, представляющей собой неподвижный корпус, в нижнем и верхнем основаниях которого на подшипниках 2 закреплена рама 3, имеющая возможность разворота относительно оси Y(курс). В подшипниках 4 рамы 3 закреплена внутренняя рама 5, которая имеет воможность разворота относительно оси Z(дифферент), В подшипниках 6 внутренней рамы 5 закреплена штанга 7j которая имеет возможность разворота по оси X (кpeн. Силовые приводы 8-13, корпуса которых шарни но закреплены на кронштейнах 14-19 соответственно, а штоки попарно и симметрично относительно осей вращения XjY, подсоединены к рамам 3,5 и штанге 7, предназначены для вращения соответствующих рам 3,5 и штанги 7 относительно центра вращения сО). На концах штанги 7 установлены кабины 20 и 21. На штанге 7 установлен датчик 22 обратной связи по положению, связанный с вычислителем 23 (фиг.2), вход которого связан с выходом датчика 24 положения органа 25 управления, установленного в кабине 20 или 21,
На штанге 7 закреплены тензометрические датчики 26 и 27 усилий, электрически связанные с входами, блока 28 управления приводом в состав которого входят усилители 29 и 30, входы которых соответственно связаны с выходами датчиков 26
и 27, а выходы - с входами вьтрямительных мостов 31 и 32, выходы которых соединены с первыми входами компараторов 33 и 34 соответственно, вторые входы которых соединены между собой и с источником 35 опорного напряжения. Выход компаратора 33 соединен с первым входом триггера 3 второй вход которого соединен с первым нормально разомкнутым кон:тактом кнопки 37, второй, нормально разомкнутый, контакт которой заземлен. компаратора 34 соединен с первым входом триггера 38, второй вход которого соединен с первым нормально разомкнутым контактом кнопки 37 сброса сигнала. Выход триггера 38 соединен с электриче;скими входами злектрогидравлических перепускного клапана 39 и запорного вентиля 40, а выход триггера 36 - с электрическими входами электрогидравлических перепускного клапана 41 и запорного вентиля 42, Первый гидравлический вход электрогидравлического перепускного клапана 39 соединен с первым входом гидравлического привода 8 и первым выходом злектрогидравлического cejv воклапана 43, а второй - с вторым входом гидравлического привода 8 и вторым выходом электрогидравлического сервоклапана 43. Электрогидравлический клапан 43 через запорный вентиль 40 соединен с магистралями 44 нагнетания и 45 слива.
Первый гидравлический вход электрогидравлического перепускного клапана 41 соединен с первым входом гидравлического привода 9 и первым выходом электрогидравлического сервоклапана 46, а второй - с вторым входом гидравлического привода 9 и вторым выходом электрогидравлического сервоклапана 46. Электрогидравлический сервок-лапан 46 через запорный вентиль 42 соединен с магистралями 47 нагнетания и 48 слива, Магистрали 44 и 47 нагнетания соединены с гидростанцией 49.
Подключение приводов по каяэдой координате может быть выполнено таким образом, что движение кабины по данной координате будет осуществляться либо при синфазном, либо при противофазном штоках приводов.
В качестве гидравлических приводов 8-13 в данном устройстве могут быть применены гидроусилители ти:Па БУ-170, БУ-190, КАУ-120, а в ка честве кабин 20 и 21 - реальные кабины имитируемого транспортного средства с органами управления и имитируемым оборудованием и прибора ми, Б качестве датчиков 22 может быть применен потенциометр типа ПТП-11 или СКВТ типа БТ-5а, в качестве вычислителя 23 - аналоговая вычислительная машина типа АВК-32. В качестве электрогидравлических сервоклапанов 43 и 46 могут быть пр менены электрогидравлические сервоклапаны типа встроенных в рулевые агрегаты РА-5БП, а в качестве перепускных клапанов 39 и 41 запорных вентилей 40 и 42 - вентили, золотник которых связан сердечником электромагнитной катушки, В качест- ве тензодатчиков 26 и 27 могут быть использованы тензодатчики типа 2ПКБ, в качестве компараторов 33 и 34 - компараторы типа К554САЗ, в качестве триггеров 36 и 38 - стандартные триггеры типа К155ТВ1 с тра зистором типа КТ827А, включенном на выходе для увеличения допустимого тока нагрузки. Работу тренажера рассмотрим на примере работы одной из пар гидравлических приводов (например 8 и 9 приводы крена кабины,.реализующие их разворот относительно оси X, фиг, 2), Рабочая жидкость (например, масл АМГ-10) поступает из гидростанции 4 по магистралям 44 и 47 нагнетания через запорные вентили 40 и 42 и электрогидравлические сервоклапаны 43 и 46 на входы гидроцилиндров 8 и 9 соответственно, В указанном сос тоянии схема готова к отработке управляющего воздействия. Таковым является усилие, приложенное обучавмым к органу 25 управления (в данно случае по крену) кабины 20 или 21 имитируемого транспортного средст-ва. Обучаемый, находящийся в кабине 20 или 21 имитируемого транспортного средства, управляя последним (например, по крену), отклоняет орган 25 управления на угол, при это механически связанный с ним датчик 2 разворачивается на угол к, k- у, (1де k - редукционное число). На в ходе датчика 24 появляется электрический сигнал, пропорциональный угл 64 разворота штока датчика 24, и поступает в вычислитель 23, куда поступают и другие параметры движения транспортного средства (скорость, дифферент, курс и т,д,) , а также заданные условия внешней среды и где формируют сигналы задания, поступающие на электрические входы электрогидравлических сервоклапанов 43 и 46 гидравлических приводов 8 и 9, Эти сигналы будут равны по амплитуде и противоположны по знаку, так как согласно данной схеме штоки гидравлических приводов для отработки заданного угла крена должны двигаться во взаимно противоположных направлениях. Согласно величине и знаку сигнала задания электрогидравлические клапаны 43 и 46 соединяют соответствующую камеру гидравлических приводов 8 и 9 с магистралями 44 и 47 нагнетания и платформа перемещается до тех пор, пока сигнаш задания не сравняется по амплитуде с сигналом отработки, поступающим в вычислитель 23 с датчика 22. Аналогичным образом схема отреагирз ет на изменение крена кабины 20 или 21 в результате изменения внешних условий (бальность моря, изменение силы и направления набегающего потока и т.д.), которые поступают в вычислитель 23 по другим входам и суммируются с сигналом задания крена обучаемым. При подаче на вычислитель 23 сигнала пропорционального дифференту V (приводы 10 и 11) или курсуу(приводы 12 и 13), внутренняя рама 5 и рама 3 совершают развороты (.вместе со штангой 7 и кабинами 20 и 2 О относительно осей2(дифферент) иУ(курс) соответственно. При этом направление движения щтоков гидроцилиндров 12 и 13J как и в рассмотренной схеме, встречное и сигналы задания, поступаю1г ие на электрический вход электрогидравлических сервоклапанов 43 и 46 равны по амплитуде и противоположны по знаку, а штоков г -1дроцилиндров 10 и 11 - согласное, а следовательно, сигналы задания равны по амплитуде и знаку. Таким образом, кабины 20 и 21, в которых находятся обучаемые, совершают развороты в соответствии с законами движения имитируемого транспортного средства в ответ rta
отклонения органов управления обучаемым, которые преобразуются в вычислитель 23 и поступают на электрогидравлические сервоклапаны 40 и 43 гидравлических приводов 8-13 в виде сигналов управления.
Рассмотрим работу устройства в аварийных си-туациях: обрыв в магистрали нагнетания одного из гидравлических приводов; заклинивание одного из гидравлических приводов.
В случае обрыва магистрали нагнетания одного из гидравлических приводов (например, 8) перемещение платфорьы осуществляется другим приводом 9 по описанному вы ше алгоритму. При этом привод 8 становится своеобразным демпфирующим звеном, несколько снижающим скоростные характеристики платформы.
. . .
В случае заклинивания (например, гидравлического привода 8) один конец штанги 7 останавливается, а на другом в результате действия привода 9 возникает изгибающий момент. На выходе датчика 27 появляется сигнал, пропорциональный величине изгибающего момента, и через усилитель 30 и выпрямительный мост 32 поступает на второй вход компаратора 34, где сравнивается с величиной
опорного напряжения, поступающего на первый вход от источника 35. Пос ле того, как поступающее от датчика 27 напряжение превысит значение опорного, компаратор 34 вьщает управляющий сигнал на первый вход триггера 38. Последний устанавливается в единичное состояние и подает сигнал на электрические входы злектрогидравлических перепускного клапана 39 и- запорного вентиля 40. При этом клапан 39 соединяет обе камеры (первый и второй входы) гидравлического привода 8, а запорный вентиль 40 отсекает злектрогидравлический сервоклапан 43 от магистралей 44 нагнетания и 45 слива. Шток привода 8 приобретает возможность свободного перемещения и, как ив предьщущем случае,
0 становится своеобразным демпферным звеном по отнощению к гидравлическому приводу 9. Дальнейшее перемещение платформы производится приводом 9 описанным вьше образом. Триггеры 36 и 38 устанавливаются в исходное ( нулевое) состояние нажатием кнопки 37 Сброс.
Изобретение позволяет демпфировать ударные нагрузки (при имитации акцелерационной информации) и повысить точность отработки управляющих сигналов, что приводит в конечном счете к повьтению эффективности обучения.
м
uJ t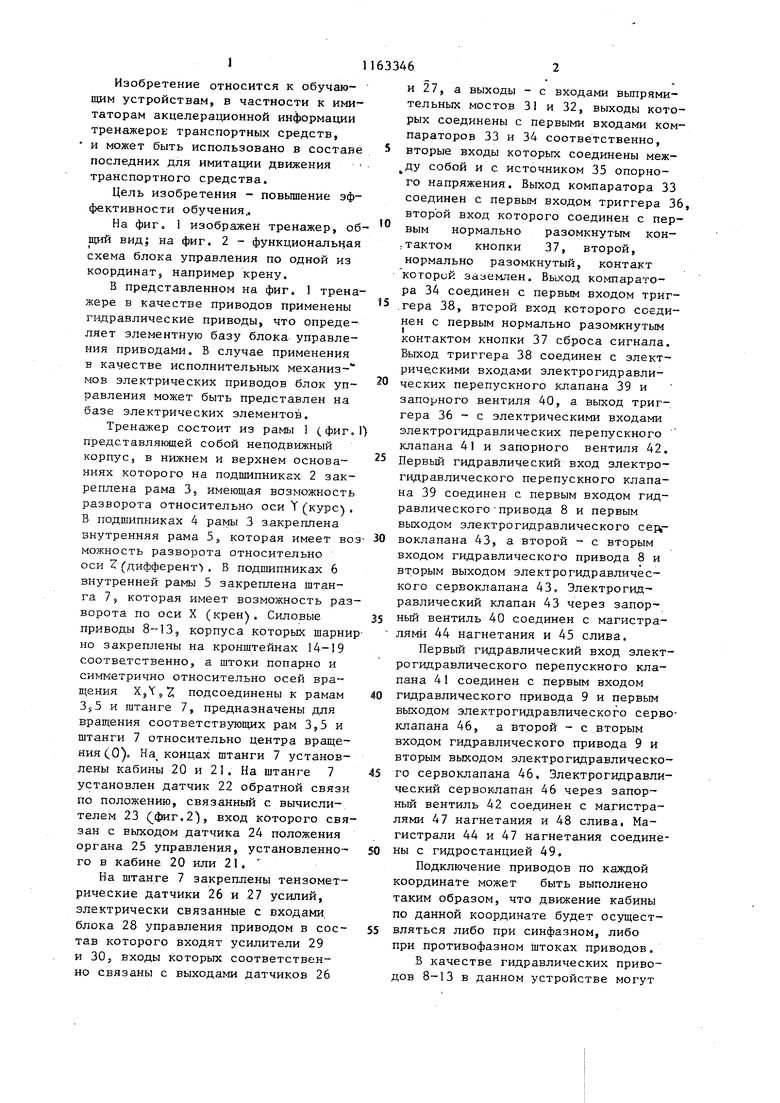
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления движением кабины тренажера | 1983 |
|
SU1153341A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| Тренажер транспортного средства | 1983 |
|
SU1141442A1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170905C1 |
| ТРЕНАЖЕР | 1992 |
|
RU2037209C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2067951C1 |
| ТРЕНАЖЕР ПОКИДАНИЯ ТОНУЩЕГО ВЕРТОЛЕТА | 2017 |
|
RU2655570C1 |
| КОМПЬЮТЕРНЫЙ ТРЕНАЖЕР НАЧАЛЬНОЙ ПОДГОТОВКИ МЕХАНИКА-ВОДИТЕЛЯ | 2001 |
|
RU2190256C1 |
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
1. TPtHAp: ДЛЯ ОБУЧЕНИЯ ПЕРСОНАЛА ТРАНСПОРТНЫХ СРЕДСТВ, содержащий расположенные внутри неподвижной раьа с возможностью разворота относительно вертикальной и одной горизонтальной осей с .помощью силовых приводов родвижные рамы, на одной из которых установлена с возможностью разворота относительно другой горизонтальной оси щтанга с замере пленными на ее концах кабинами с органами управления, о тличающийся тем, что, с целью повышения зффективности обучения J он снабжен для каждой координаты расположенным симметрично первому силовому приводу относительно оси вращения кабины дополнительным силовым приводом с блоком управления и подключенными к первому и второму входам последнего тензометричеокими датчиками усилий, установленными на штанге и рамах кабины в ме.тах воздействия на них штоков силовых приводов 2 Тренажер по п.1, о т л и чающ-ийся тем, что блок управления г ид paiB ли чес кими приводами включает в себя компараторы, источ(Л ник опорного напряжения, подключенный к первым их входам, другие входы которых через преобразовательные связаны с входами блока управления, триггеры, одни входы которых подключены к выходам соответствукицих компараторов, другие - к кнопке спроФ со са сигнала, а выходы соедийены с выходами блока управления. со 4 Од
| Тренажер для облучения персонала транспортных средств" | 1977 |
|
SU657450A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
