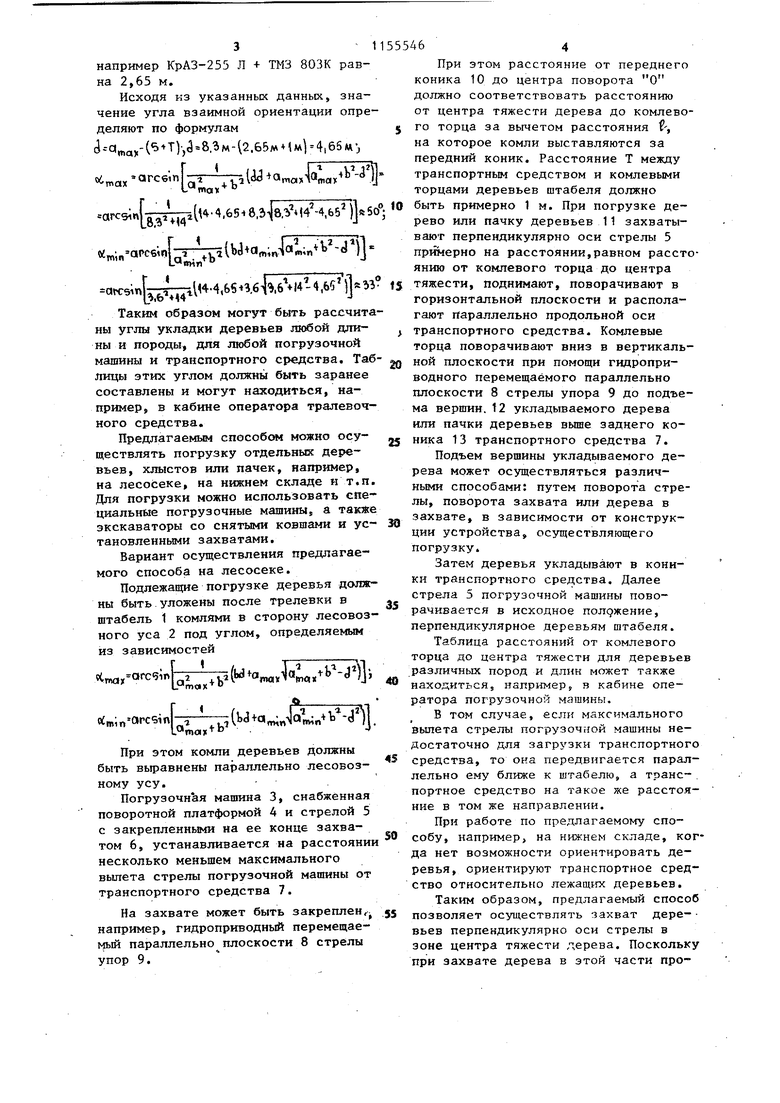
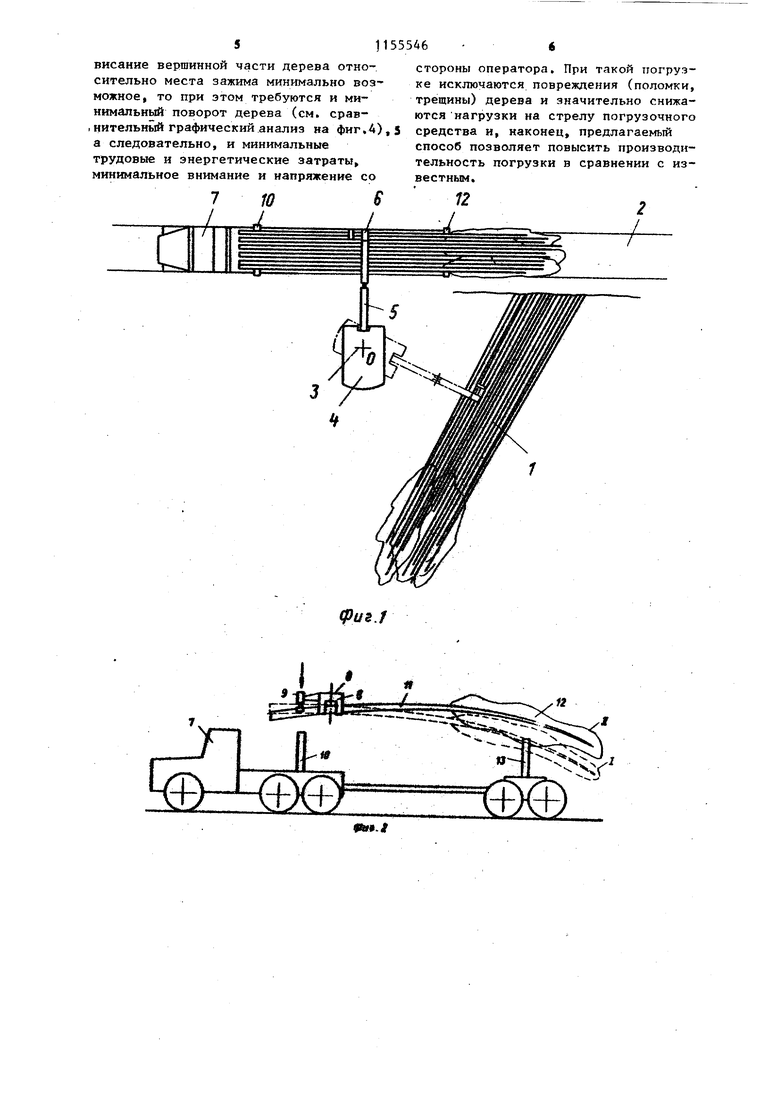
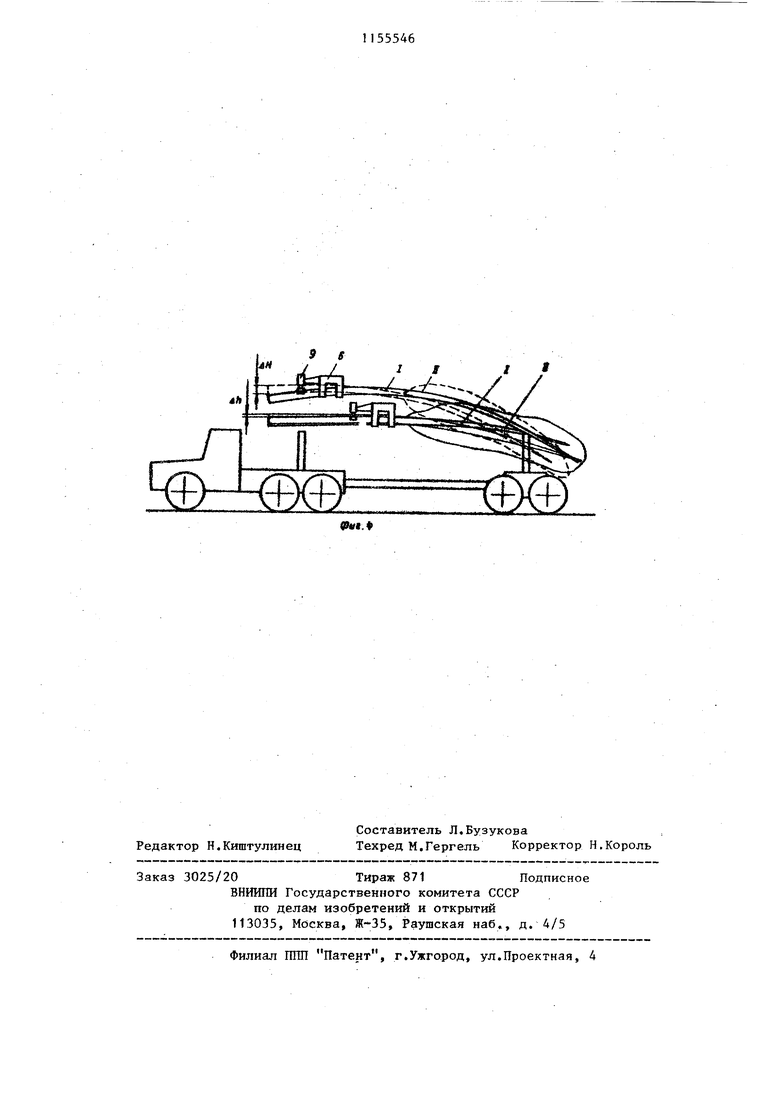
Изобретение относится к способам погрузки деревьев на лесовозный тра порт и может быть использовано в ле ной промьшшенности и лесном хозяйстве с По основному авт.св. № 630174 известен способ погрузки деревьев на транспортное средство, заключающийся в том, что деревья захватываю перпендикулярно оси стрелы, поднима ют, поворачивают в горизонтальной плоскости, располагают параллельно продольной оси транспортного средст ва и укладывают его на коник, приче перед укладкой на коник транспортно го средства деревья поворачивают в вертикальной плоскости перпендикуля но оси стрелы, поднимая вершины деревьев до высоты, превышающей высоту пакета деревьей, уложенных на ко кик транспортиого средства. Недостатком известного способа является низкая производительность погрузки, так как для того, чтобы уложить в коник транспортного средства консольно свисаняцую неуправляемую часть дерева , необходимо дополнительное напряжение., внимание, трудовые затраты и профессиональное мастерство оаератора и большие энер гетические затраты. Цель изобретения - повышение про изводительности погрузки путем снижения энергетических и трудовых затрат Указанная цель достигается тем, что согласно способу погрузки деревьев на транспортное средство перед захватом деревьев рабочим органом погрузочной машины деревья и транспортное средство взаимно ориентирую под углом максимальное и минимальное значения которого, а также расстояние от оси поворота стрелы погрузочной машины до комлевых торцов этих деревьев определяются соответственно из следующих зависимостей fcli У-па гс,Ц Р . «„;„-с,гс5 п| |Г-7ъЛЬ +-а ;п.1а;;„ Ъ - 3 1 ( -ширина транспортногде S го средства, -расстояние по перпе дикуляру от транспортного средства до комлевых торцов подлежащих погрузке деревьев; соответственно максимальный и минимальный вылеты стрелы; b - длина участка дерева от комлевого торца до центра тяжести дереваJ d расстояние от оси поворота стрелы до комлевых торцов деревьев, На иг. 1 изображено устройство, позволяющее реализовать предлагаемый способ на фиг. 2 - схема поворота деревьев в вертикальной плоскости (I - исходное положение дерева, il - конечное положение)i на фиг, 3 расчетная схема погрузки на минимальном и максимальном вылетах стрелы погрузочной машины, на фиг. 4 схема положений дерева при повороте в вертикальной плоскости перед укладкой на транспортное средство по известному и по предлагаемому способам (I - исходное положение дерева, II - конечное положение). В соответствии с предлагаемым способом подлежащие погрузке деревья должны быть сориентированы под углом к транспортному средству (фиг. 1 и-3). В качестве погрузочной машины может быть выбрана, например, валочнопакетирующая машина ЛП-19 со снятым захватно-срезающим устройством и оснащенная погрузочным устройством. Максимальный вылет стрелы ЛП-19 с погрузочным устройством равен 8,3 м, минимальный выпет 3,6 м. Принимают например,, что загружаемая древесина - ель длиной L . 35 м, расстояние от комлевого торца до центра тяжести b L-K, где К - коэффициент, определяющий расстояние от комлевого торца до центра тяжести, в зависимости от породы деревьев. Для если К 0,4, берется из справочной литературы. Торцы подлежащих погрузке деревьев обычно располагают на расстоянии Т по перпендикуляру от транспортного средства до комлевых торцев подлежащих погрузке деревьев. Оно приблизительно равно 1 м. Ширина выбранного транспортного средства. например КрАЗ-255 Л + ТМЗ 803К равна 2,65 м. Исходя КЗ указанных данных, значение угла взаимной ориентации определяют по формулам (,-(T)-,-8.3M-l2.65M + U 4|65Wj 1АЗ+а «, .Ь ;{g ziH-4.65.8,3i|8,i4-4,65).5o arcsin о „;„ аРСб;п ГТь5 U а«г5;пУ; ДН.4,66..6%и-4М « Таким образом могут быть рассчита ны углы укладки деревьев любой длины и породы, для любой погрузочной машины и транспортного средства. Таб лицы этих углом должны быть заранее составлены и могут находиться, например, в кабине оператора трелевочного средства. Предлагаемым способом можно осуществлять погрузку отдельных деревьев, хлыстов или пачек, например, на лесосеке, на нижнем складе и т.п. Для погрузки можно использовать специальные погрузочные машины, а также экскаваторы со снятыми ковшами и установленными захватами. Вариант осуществления предлагаемого способа на лесосеке. Подлежащие погрузке деревья должны быть.уложены после трелевки в штабель 1 комлями в сторону лесовозного уса 2 под углом, определяемым из зависимостей Чтх 0с9 ;2-;(Wta,NajK,)J orc5in -т-4т5 ( +am;JaL;n+b -J l. При этом комли деревьев должны быть вьфавнены параллельно лесовозному усу. Погрузочная машина 3, снабженная поворотной платформой 4 и стрелой 5 с 3акрепленнь ш на ее конце захватом 6, устанавливается на расстоянии несколько меньшем максимального вылета стрелы погрузочной машины от транспортного средства 7. На захвате может быть закреплен,например, гидроприводный перемещаеifbM параллельно плоскости 8 стрелы упор 9. При этом расстояние от переднего коника 10 до центра поворота О должно соответствовать расстоянию от центра тяжести дерева до комлевого торца за вычетом расстояния , на которое комли выставляются за передний коник. Расстояние Т между транспортным средством и комлевыми торцами деревьев штабеля должно быть примерно 1 м. При погрузке дерево или пачку деревьев 11 захватывают перпендикулярно оси стрелы 5 npimepHO на расстоянии,равном расстоянию от комлевого торца до центра тяжести, поднимают, поворачивают в горизонтальной плоскости и располагают параллельно продольной оси транспортного средства. Комлевые торца поворачивают вниз в вертикальной плоскости при помощи гидроприводного перемещаемого параллельно плоскости 8 стрелы упора 9 до подъема вершин. 12 укладываемого дерева или пачки деревьев выше заднего коника 13 транспортного средства 7. Подъем вершины укладываемого дерева может осуществляться различными способами: путем поворота стрелы, поворота захвата или дерева в захвате, в зависимости от конструкции устройства, осуществляющего погрузку. Затем деревья укладывают в коники транспортного средства. Далее стрела 5 погрузочной машины поворачивается в исходное полджение, перпендикулярное деревьям штабеля. Таблица расстояний от комлевого торца до центра тяжести для деревьев различных пород и длин может также находиться S иаггример, в кабине оператора погрузочной машины. В том случае, если максимального вьшета стрелы погрузочной машины недостаточно для загрузки транспортного средства, то она передвигается параллельно ему ближе к штабелю, а транс- . портное средство на такое же расстояние в том же направлении. При работе по предлагаемому способу, например, на нижнем складе, когда нет возможности ориентировать деревья, ориентируют транспортное средство относительно лежащргх деревьев. Таким образом, предлагаемый способ позволяет осуществлять захват дере- вьев перпендикулярно оси стрелы в зоне центра тяжести лерева. Поскольку при захвате дерева в зтой части провисание вершинной части дерева относительно места зажима минимально воз ножное, то при этом требуются и минимальный поворот дерева (см. сравгнительньй графический анализ на фиг,Л), 5
а следовательно, и минимальные трудовые и энергетические затраты, минимальное внимание и напряжение со
способ позволяет повысить производительность погрузки в сравнении с известным. стороны оператора. При такой погрузке исключаются, повреждения (поломки, трещины) дерева и значительно снижаются нагрузки на стрелу погрузочного средства и, наконец, предлагаемый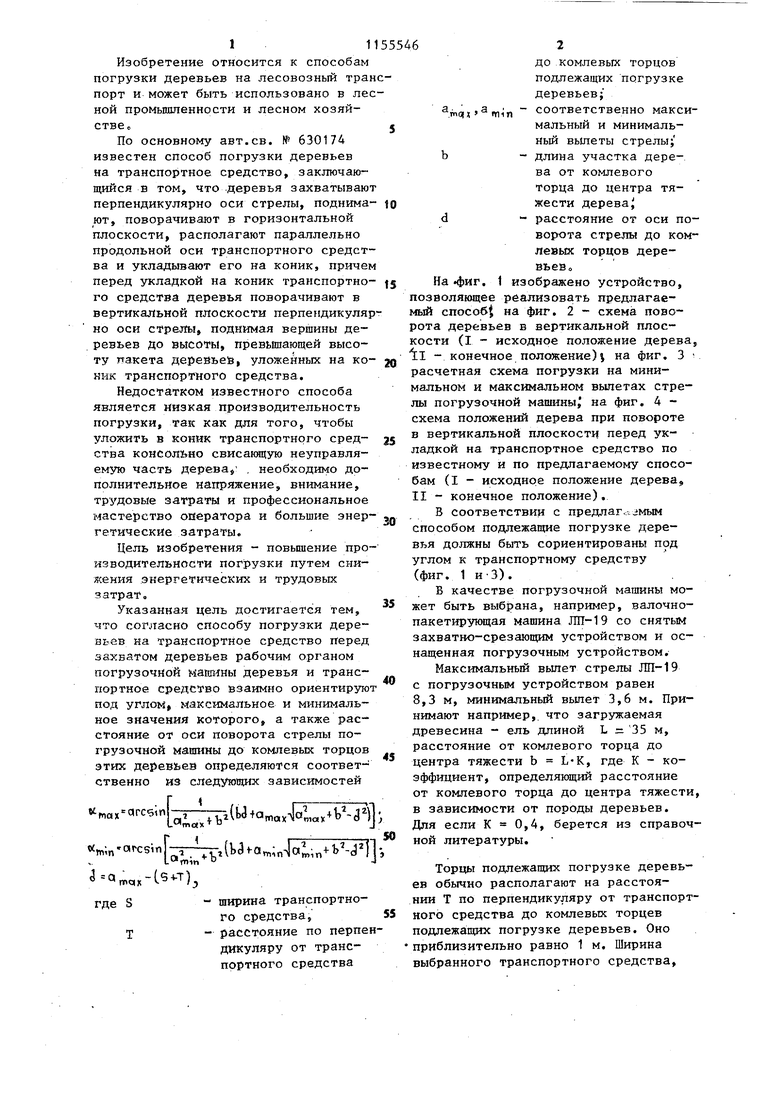
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разработки лесосеки | 1982 |
|
SU1064912A2 |
| Транспортное средство | 1988 |
|
SU1594018A1 |
| СПОСОБ ЛЕСОЗАГОТОВОК ПРИ КАНАТНОЙ ТРЕЛЕВКЕ ДРЕВЕСНОГО СЫРЬЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2178967C1 |
| СПОСОБ НАПРАВЛЕННОЙ ВАЛКИ ДЕРЕВЬЕВ | 2013 |
|
RU2540544C2 |
| СПОСОБ ЛЕСОЗАГОТОВКИ | 2012 |
|
RU2513528C2 |
| Лесозаготовительная машина | 1982 |
|
SU1063335A1 |
| СПОСОБ РАЗРАБОТКИ ЛЕСНЫХ ТЕРРИТОРИЙ ТРАСС НЕФТЕГАЗОПРОВОДОВ И ЛЭП | 2012 |
|
RU2489844C1 |
| СПОСОБ РАЗРАБОТКИ ЛЕСНЫХ ТЕРРИТОРИЙ ТРАСС НЕФТЕГАЗОПРОВОДОВ И ЛЭП | 2011 |
|
RU2473207C1 |
| СПОСОБ РАСКРЯЖЕВКИ УЛОЖЕННЫХ В ШТАБЕЛЬ ДЕРЕВЬЕВ | 2014 |
|
RU2599563C2 |
| Способ безэстакадной крупнопакетной погрузки леса на лесовозные автомашины с прицепом | 1960 |
|
SU141436A1 |
СПОСОБ ПОГРУЗКИ ДЕРЕВЬЕВ НА ТРАНСПОРТНОЕ СРЕДСТВО по авт.св. № 630174, отличающийся тем, что, с целью повьвпения производительности погрузки путем снижения энергетических и трудовых затрат, перед захватом деревьев рабочим органом погрузочной машины деревья и транспортное средство взаимно ориентируют под углом, максимальное и 13 : минимальное значения которого, а также расстояние от оси поворота стрелы погрузочной машины до комлевых торцов этих деревьев определяются соответственно из следунядих зависимостей l(,,K«,. in -5 «max Ьп,с,х nhT-Tr(bc3fa ;n4aJ i b l l; « гтипО : J J-am«r-(), где S ширина транспортного средства; расстояние по перпендикуляру от транспортного средства до комлевых торцов подлежащих по грузке деревьев5 соответственно максиmor m-rn мальный и минимальный вылеты стрелы; длина участка дерева от комлевого торца до центра ..тяжести дерева fen расстояние от оси поворота стрелы до комел СП левых торцов деревьев. 4iib Ф
12
9 S
| Способ погрузки деревьев на транспортное средство | 1977 |
|
SU630174A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
