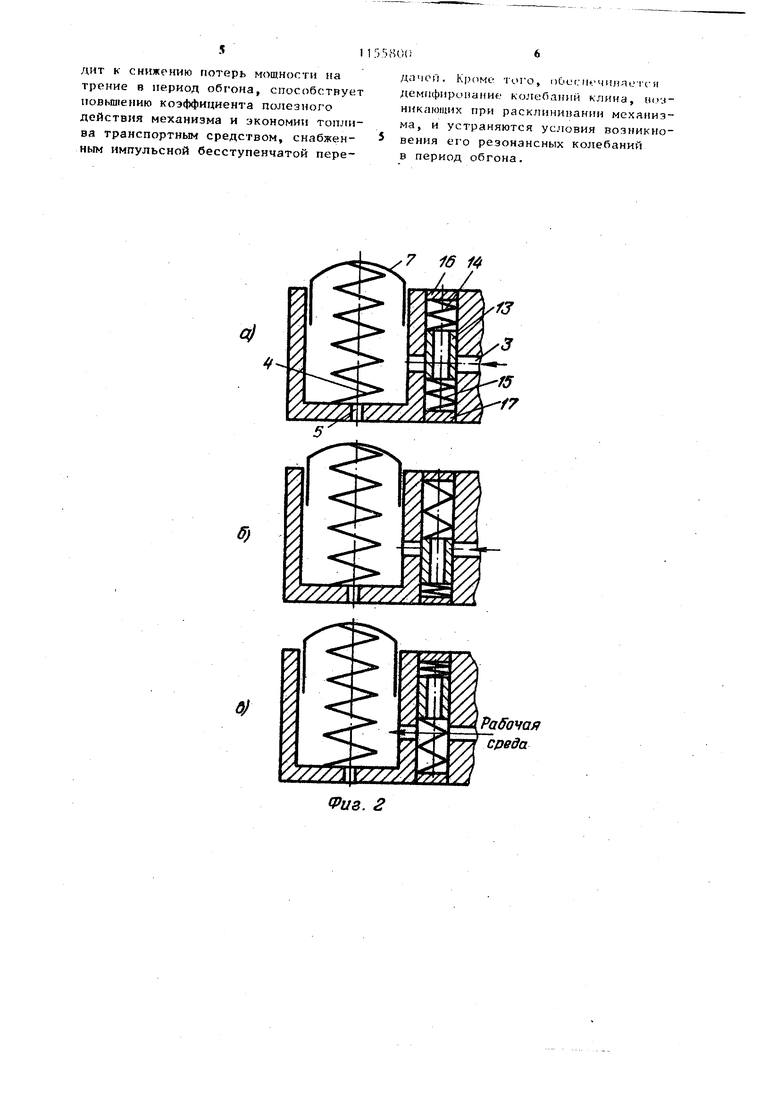
JП Изобретение относится к машиностроению и может быть использовано, например, в импульсных бесступенчатых передачах. Цель изобретения - снижение потерь мощности на трение в период обгона путем автоматического регулиро вания поджимного усилия, действующего на клин. На фиг. 1 показан механизм свободного хода; на фиг. 2 - рабочие положения дифференциального устройства; на фиг. 3 - зависимости скоростей QI эксцентрика и со обоймы от угла поворота входного вала передачи |вд ; на фиг. 4 - зависимости ускорения Г и силы инерции Р эксцентрика от р на фиг. 5 - зависимость перемещения поршня п гидррподжимного устройства от tfj . Механизм свободного хода содержит поджимное устройство в виде цилнндро поршневого и инерционно-золотникового узлов. На эксцентрике 1 ведущего вала механизма закреплен кронштейн 2, имеющий канал 3 для подвода рабочей среды, например масла из системы смазки, под давлением в гнездо 4 с дросселем 5, в котором установлены пружина 6 и поршень 7, входящий в контакт с пяткой клина 8, установленногр в клиновой полости 9 между обоймой 10 и промежуточным кольцом 1 В кронщтейне 2 параллельно оси гиезда 4 вьтолнено отверстие 12, пересекающее каиал 3 на входе в гнездо 4. В отверстии 12 установлен золотник 1 в виде пустотелого цилиндра, поджатого с обеих сторонпружинами 4и 15, усилия которых регулируются с помощью винтов-пробок 16 и 17. Размеры золотника 13 таковы, что в зависимости от его положения наружная цилиндрическая поверхность может открывать или закрывать канал 3. При работе механизма свободного хода в импульсной передаче колебания скорости ведущего зксцентрика 1 соответствуют графику w , изображенному на фиг. 3, скорость обоймы 10 графику 6)2 . При такой неравномерности скорости GO, эксцентрика на клин 8 поршень 7 и золотник 13 действуют инерционные силы Р (фиг. 4) перемеиной амплитуды и направления, пропорциональные ускорению вынужденных колебаний f, эксцентрика 1. 0 При угле поворот-:) ммодпо1с 1,ч,ча передачи (/g, (J, когдл скорость со, эксцентрика 1 имеет максимальное значение, его ускорение f( рапно нулю, а следовательно, и силы инерции, действующие на элементы 8,7 и 13, также равны нулю. В этом случае рабочее положение золотника 13 соот-ветствует положению на фиг. 2q, при котором обеспечивается перекрытие канала 3 и замыкание объема жидкости в.гнезде 4, заполненном на предыдущем этапе цикла. Поджимное устройство при этом представляет собой гидравлический упор. Положение поршня 7 в этом состоянии соответствует полному контакту клина 8 с рабочими поверхностями обоймы 10 и промежуточного кольца 11 описывается координатой Ь (фиг. 5). В момент расклинивания механизма, когда скорость со обоймы 10 начинает превышать скорость coj ведущего эксцентрика 1, возможны соударения клина 8 о гидроупор. Для смягчения, возникающих при этом динамических нагрузок, в конструкции предусмотрено истечение жидкости из сжимаемого масляного объема в гнезде 4 через дроссель 5. В результате утечки масла через дроссель 5 давление и объем жидкости в гнезде 4 уменьшаются и поршень 7 перемещается вниз, освобождая клин 8 от поджимного усилия (координата положения Ь поршня 7 становится меньше ho ) При действии отрицательного ускорения 4 в период обгона (D Cj ) золотник 13 под действием силы инерции перемещается вниз (фиг. 2S), сжимая пружину 15. Приходное отверстие в золотнике 13 обеспечивает свободное перетекание масла из нижней части отверстия 12 в его верхнкио часть. При этом вследствие дросселирования жидкости, продолжающегося в связи с действием на клин 8 и поршень 7 отрицательного ускорения, координата b положения поршня 7 продолжает уменьшаться. Интенсивность уменьшения зависит от амплитуды отрицательного ускорения. и у когда скорость Ш( эксцентрика 1 имеет минимальное значение, ускорение вынужденных колебаний и сила инерции равны нулю, л положение зсяютника П со)тветствует фиг. 2а. При действии положительного ускорения (it tpBi ---) на золотнике 13 возникает сила инерции противоположнего знака, заставляющая его перемещаться вверх, сжимая пружину 14. При этом если усилие пружины 14 от предварительного поджатия в статическом положении (фиг. 2а) больше чем сила инерции золотника 13, то его положение соответствует фиг. 2Q и канал 3 по-прежнему перекрыт, т.е при «- Чвх клин 8 находится в свободном неподжатом состоянии. Если усилие пружины предварительного поджатия (Р„р ) меньше, чем сила инерции золотника (Р,), т.е. при Чвг золотник 13, отжав пружину 14, перемещается вверх (фиг. 2Ь) открыв канал 3. Под действием давления системы смазки поршень 7 перемещается вверх, заняв положение h (фиг. 5),и поджимает клин 8 с усштием, необходи ялм для выжимания смазки с рабочих поверхностей трения. Отверстие в золотнике 13 обеспечивает выравнивание давления масла. Тсчким образом, в период обгона при(о с ер, , (где ср - угол поворота входного вала передачи, соответ ствующий заклиниванию механизма свободного хода при и, Wjj) клин 8 находится в поджатом состоянии, обеспечивая условия для нормального протекания последующего процесса раклинивания. После заклинивания при (- 2 имеет место период рабочего хода, в течение которого клин 8 находится в зажатом состояния между поверхностями обоймы 10 и промежуточного кольца 11. При этом происходит умен шение амплитуды ускорения EI и силы инерции Р золотника 13 (фиг.4) при превышении силой пружины 14 инерционной составляющей золотник 1 перемещается вниз, перекрывая канал 3 (фиг. 2а), и замыкает объем жидкости в гнезде 4, образуя гидрав лический упор. На этом цикл работы механизма и поджимного устройства заканчивает ся и при дальнейшем функционироваНИИ описанные вьш1е этапы работы повторяются в аналогичной последова-гелыкм-Ги. .При у.ме ьшеиин амплитуды скщхнти ведущего эксцентрика 1 от со, до ( и амплитуды ускорения до f J уменьшается и сила инерции, действующая на золотник 13, до величины Р, . В результате происходит смещение фазы открытия канала 3 от Cf до tp (фиг.4), объясняемое снижением интенсивности роста ускорения и силы инерции. Таким образом, период времени, в течение которого клин В при обгоне находится в поджатом состоянии, зависит от скоростного режима. С увеличением амплитуды скорости, когда в условиях гидродинамический смазки увеличивается толщина масляной пленки на поверхностях трения, предлагаемая конструкция обеспечивает увеличение длительности поджатого состояния клина 8 для надежного выдавливания смазки из зоны контакта и обеспечения заклинивания механизма свободного хода. С, уменьшением амплитуды скорости обеспечивается уменьшение периода поджатого состояния клина 8 при обгоне, так как снижается толщина масляной пленки и, следовательно, время, необходимое для ее выжимания с поверхностей трения. Подбором площади поршня 7, давления системы смазки, массы золотника 13, усилий и жесткостей пружин 14 и 15, обеспечивается оптимальная настройка поджимного устройства на эксплуатационные режимы. Если силы инерции, действующей на золо ник 13, не достаточно для деформации пружин 14 и 15, что возможно при малых скоростях работы механизма, то золотник 13 находится в положении, соответствующем фиг. 2а, и канал 3 закрыт. В этом случае поджатие клина 8 к поверхностям обоймы 10 и промежуточного кольца 11 осуществляется пружиной 6, усилие которой соответствует квазистатическим условиям работы и значительно меньше величины, обеспечиваемой гидравлической системой в динамических условиях. Таким образом, предлагаемая конструкция механизма свободного хода позволяет автоматически регулировать поджимное усилие на клине в течение цикла работы в зависимости от скоростного режима, что в итоге приис днт к снижению потерь мощности на трение в период обгона, способствует иовьшшнию коэффициента полезного действия механизма и экономии топлива транспортным средством, снабженным импульсной бесступенчатой передачей. KpdMf чччо, пОсс.Шчилпется демифпронание Колебаний клина, uo-.iникающих при расклининанин механизма, и устраняются условия возникновения его резонансных колебаний в период обгона.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм свободного хода | 1984 |
|
SU1201579A1 |
| УНИВЕРСАЛЬНЫЙ ПРИВОД ПЛАШЕЧНОГО ПРЕВЕНТОРА | 1993 |
|
RU2085701C1 |
| УНИВЕРСАЛЬНЫЙ ПРИВОД ПЛАШЕЧНОГО ПРЕВЕНТОРА-2 | 1993 |
|
RU2097527C1 |
| Автоматическая бесступенчатая передача | 1985 |
|
SU1227876A1 |
| ШВЕЙНАЯ МАШИНА | 1993 |
|
RU2064545C1 |
| Клиновый механизм свободного хода | 1986 |
|
SU1434179A1 |
| Клиновой механизм свободного хода | 1986 |
|
SU1399541A1 |
| Клиновой механизм свободного хода | 1989 |
|
SU1693294A1 |
| ЦЕНТРОБЕЖНАЯ МУФТА | 1997 |
|
RU2135852C1 |
| Устройство для изменения степени сжатия поршневого двигателя внутреннего сгорания | 1991 |
|
SU1782291A3 |

МЕХАНИЗМ СВОБОДНОГО ХОДА, содержащий обойму, внутри которой расположен эксцентрик с кронштейном, установленное на эксцентрике промежуточное кольцо, клин, размещенный ff в клиновой полости между обоймой и кольцом, и поджимное устройство, расположенное на кронштейне и связанное с клином, отличающи и с я тем, что, с целью снижения потерь мощности на трение в период обгона путем автоматического регулирования поджимного усилия, действукмдего на клин, в кронштейне выполнены гнездо с дросселем, отверстие, ось которого параллельна оси гнезда, и канал для подвода рабочей среды,,соединяющий отверстие и гнездо, а поджимное устройство выполнено в виде подпружиненного поршня, установленного в гнезде и контактирующего СП с клином, и золотника, установленного в отверстии и подпружиненного с обеих сторон. СП ел оо 12 9иа.1
б/
PUM vH.t np.
Л/2К fo fo /2yf f3 V3 Ув
Фи8. 5
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 0 |
|
SU302525A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| ПЛАНЕТАРНЫЙ ЗУБЧАТЫЙ РЕДУКТОР1й1?*""Г:пн'^|'^1 'дпС1W1^^-* ч/ J vV ^^! f -Н J IMTiHTiia-TiiMntjAfiЕ>&ИБЛИО:?КА | 0 |
|
SU343095A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
