Способы автоматического управления синхронной работой затворов аэрофотоаппаратов при съемке объектов с двух самолетов - известны. Однако они не обеспечивают требуемой точности синхронизации.
Предлагаемый способ лишен указанного недостатка.
Это достигается тем, что при помощи передатчика и приемника, установленных на различных самолетах, осуществляется задержка срабатывания затворов аэрофотоаппаратов относительно командного импульса па равные промежутки времени. При этом равенство времени в задержках устанавливается в блоке приемника и контролируется измерительной схемой.
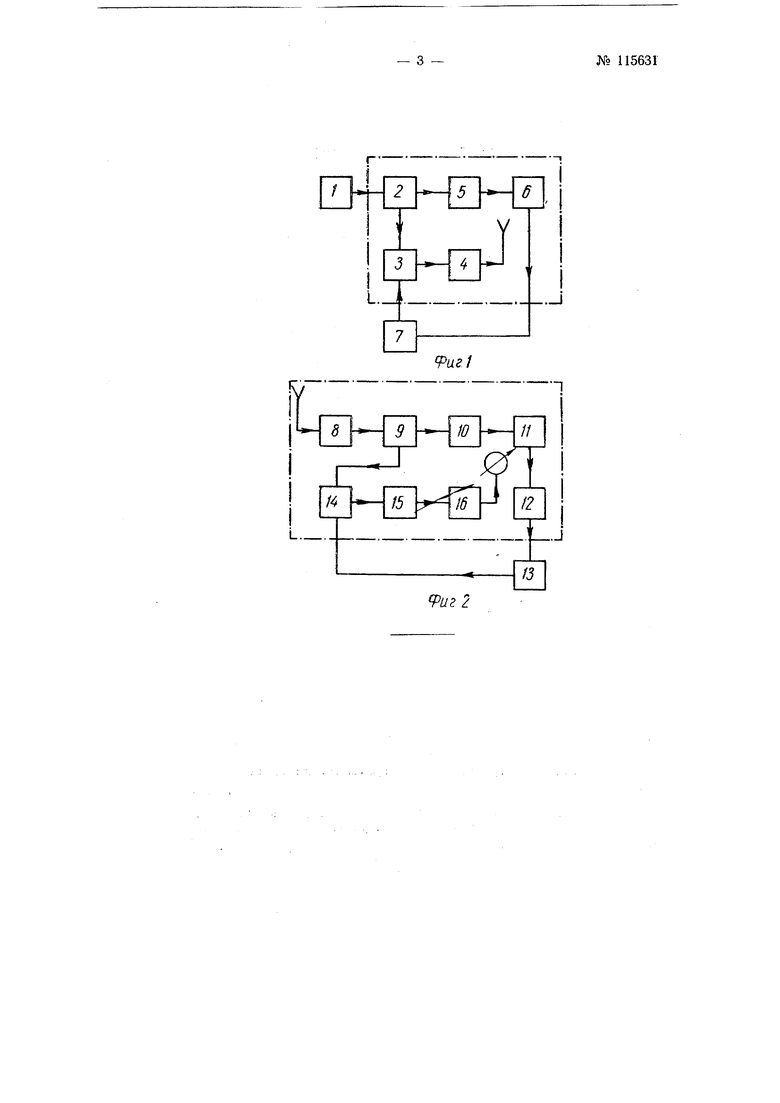
На фиг. 1 и 2 изображена блок-схема передатчика и приемника, осуществляющих автоматическое управление синхронной работой затворов фотоаппаратов по предлагаемому способу.
Запуск системы управления осуществляется подачей импульса от командного прибора 1 передатчика (фиг. 1).
Импульс от командного прибора / запускает схему 2 постоянной задержки и подается на модулятор 3, в анодной цепи которого возникает положительный импульс, вызывающий генерацию импульсного УКВ генератора 4, связанного с антенной. При этом в окружающее пространство излучается высокочастотный импульс с частотой наполнения около 150 мгц. Через 2 сек. после запуска схемы 2 постоянной задержки включается задержанный мультивибратор 5. Он вырабатывает импульс длительностью 0,5 сек., необходимый для работы реле спуска 6 затвора первого аэрофотоаппарата 7.
Таким образом, затвор первого аэрофотоаппарата срабатывает примерно через 2 сек. после прихода запускающего импульса. При срабатывании первого аэрофотоаппарата от специального синхроконтакта, ме№ 115631
ханически связанного с ламелями его затвора, на модулятор 3 поступает вторичный импульс, который снова запускает генератор 4, излучающий в пространство второй импульс (примерно, через 2 сек. после первого).
Оба принятых с передатчикаимпульса детектируются детектором 8 приемника (фиг. 2), разделяются схемой 9 разделения импульсов и направляются по двум каналам. Схема разделения импульсов представляет собой задержанный мультивибратор, запускаемый первым имлульсом и возвращаемый в исходное состояние вторым. Она формирует импульс, длительность которого равняется интервалу времени между им.пульсами, излучаемыми передатчиком.
Импульс, созданный схемой 9, соответствующий первому принятому и.мпульсу, запускает фантастронную схему 10 переменной задержки. Величина задержки этой схемы может регулироваться в некоторых пределах и устанавливаться, равной интервалу между исходными импульсами. Задержанный фантастронной схемой импульс подается далее на запуск задержанного мультивибратора 11, который вырабатывает импульс длительностью 0,5 сек., необходимый для работы реле спуска 12 затвора второго аэрофотоаппарата 13.
Второй импульс, созданный схемой разделения импульсов, соответствующий моменту срабатывания затвора первого аэрофотоаппарата, подается на задержанный мультивибратор 14 совпадения. В это же время сюда подается импульс от синхроконтакта второго аэрофотоаппарата 13. Один из этих импульсов запускает задержанный мультивибратор 14 совпадения, а второй возвращает его в исходное состояние. Таким образом, длительность сформированного импульса оказывается равной времени рассинхронизации аэрофотоаппаратов.
Далее этот импульс запускает генератор 15, амплитуда напряжения которого будет пропорциональна величине рассинхронизации аэрофотоаппаратов. Амплитуда импульса, созданного генератором /5, измеряется стрелочным импульсным вольтметром 16, которым и контролируется в процессе работы степень синхронизации аэрофотоаппаратов. Изменением величины переменной задержки оператор устанавливает необходимую степень синхронизации в пределах указанной точности.
Предмет изобретения
Способ автоматического управления синхронной работой затворов аэрофотоаппаратов в процессе аэрофотосъемки с двух самолетов, о т.лишающийся тем, что, с целью повышения точности синхронизации, при помощи передатчика и приемника, установленных на различных самолетах, осуществляется задержка срабатывания затворов аэрофотоаппаратов относительно командного импульса на равные промежутки времени, при этом равенство времени в задержках устанавливается в блоке приемника и контролируется измерительной схемой.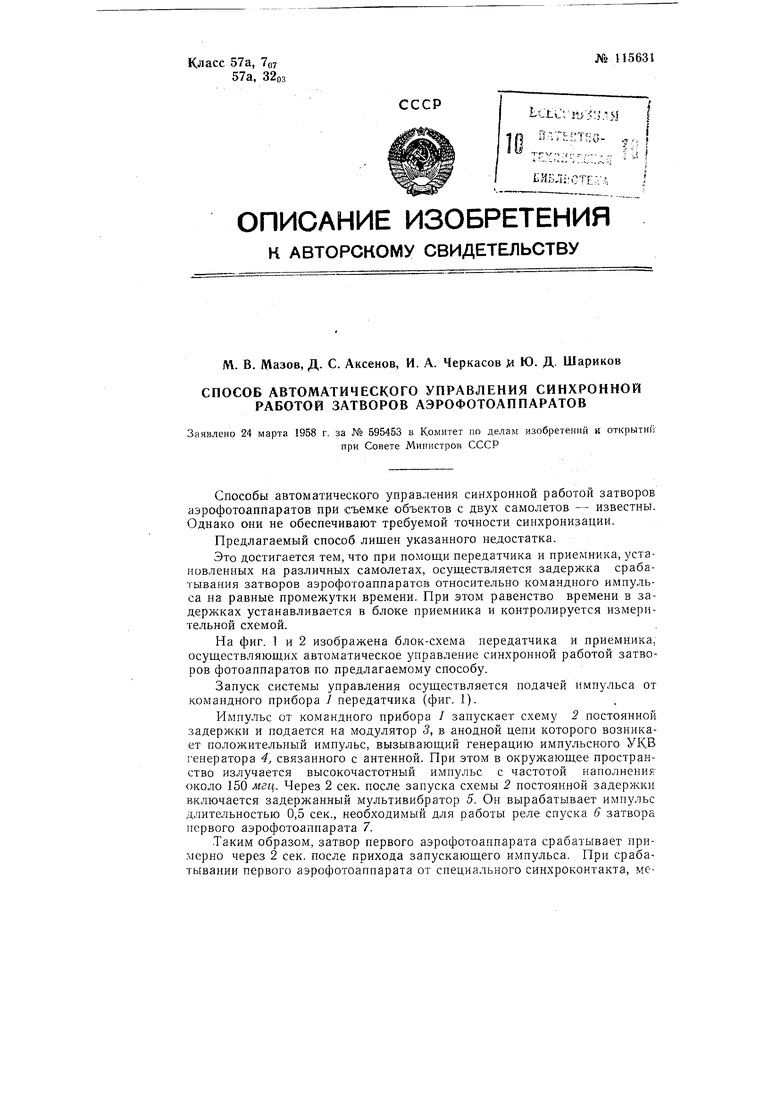

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения скорости и направления поверхностного течения в мелководных районах моря | 1958 |
|
SU119730A1 |
| Устройство для автоматического пиведения поквзаний аэрогаммарадиометра к условному уровню | 1959 |
|
SU123254A1 |
| СИСТЕМА ОПОЗНАВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2254596C2 |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК | 2002 |
|
RU2234109C1 |
| Способ телеуправления и устройство для осуществления этого способа | 1958 |
|
SU120860A1 |
| Устройство индикации пленки в лентопротяжном тракте фотоаппарата | 1990 |
|
SU1783464A1 |
| Устройство для телеуправления | 1989 |
|
SU1737482A1 |
| Пространственно-распределенная система радиопомех на беспилотных летательных аппаратах | 2023 |
|
RU2807312C1 |
| РАДИОПЕРЕДАЮЩАЯ СИСТЕМА ВРЕМЕННОЙ ОБЛАСТИ И РАДИОПЕРЕДАТЧИК | 1989 |
|
RU2105415C1 |
| ОДНОЧАСТОТНЫЙ РЕТРАНСЛЯТОР РАДИОСИГНАЛА | 1995 |
|
RU2110153C1 |