Известны гидравлические приводы одноковшевых экскаваторов со следящим управлением гидродвигателями рабочих органов, в которых система дистанционного следя)дего управления выполнена по двухпроводной схеме, причем имеется опасность подсоса воздуха в гидросистему.
Отличительной особенностью описываемого гидравлического привода с дистанционным следящим управлением гидродвигателями рабочих органов является то, что обратная гидравлическая связь рабочего оборудования с рукоятками управления выполнена по однопроводной схеме- Это позволяет устранить люфт в обратной связи и упрощает систему дистанционного гидравлического следящего управления. Кроме того, жидкость, в противоположных к щтокам полостях ведомых цилиндров-датчиков, следящей системы находится под постоянным давлением, что устраняет возмо шость подсоса воздуха в систему обратной связи и тем самым обеспечивает ее надежную работу.
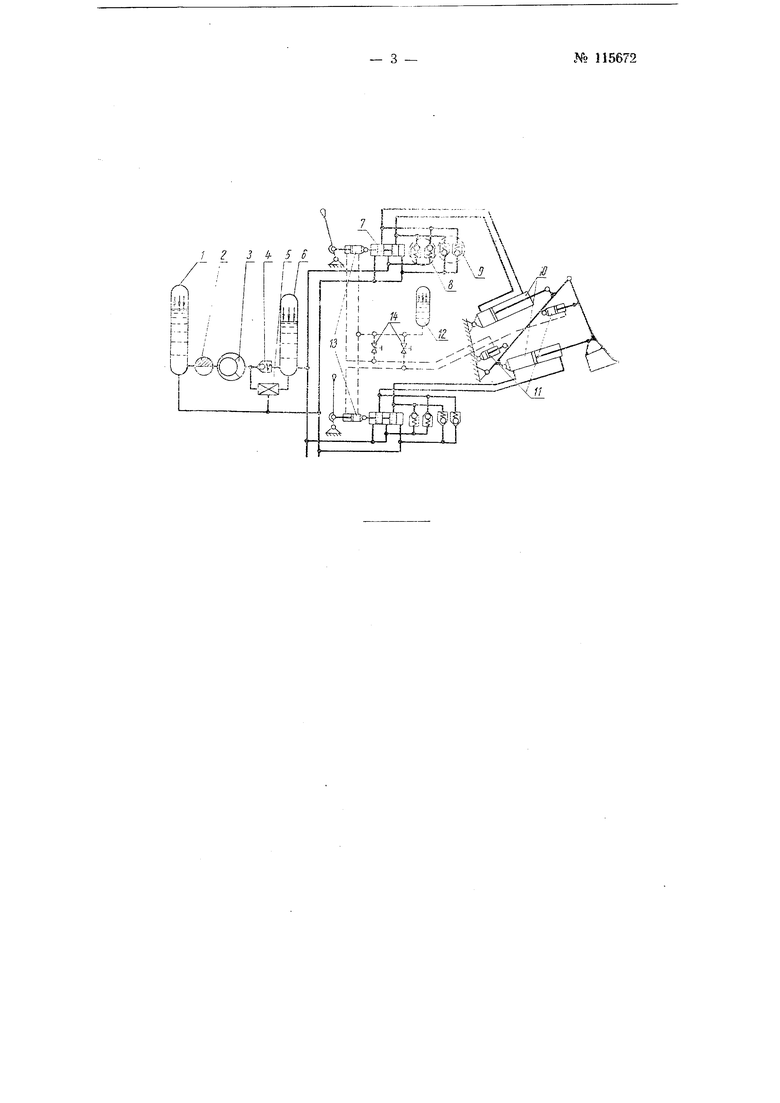
На чертеже изображена схема -идравлического привода.
Рабочая жидкость под действием избыточного давления от 2 до 5 кг/см- поступает из бака / через фильтр 2 к всасывающей полости насоса 3, который подает жидкость под рабочим давлением через обратный клапан 4 в гидроаккумулятор 6- Давление в гидроаккумуляторе (и тем самым заполнение его) автоматически поддерживается в определенных пределах специальным клапаном автоматической разгрузки насоса 5, который переводит поток Жидкости от насоса 3 или непосредственно в сливную магистраль, минуя обратный клапан 4, или в гидроаккумулятор 6. Р1з гидроаккумулятора рабочая жидкость подается через напорную магистраль к золотниковым распределителям 7 (с нулевым перекрытием). Последние управляют работой гидродвигателей 10, сообщая или разобщая полости их с напорной или сливной магистралями.
Помимо распреде тителя, полости каждого гидродвигателя непосредственно свЯзаны с напорной и сливной магистралями через систему обратных клапанов 8 и 9, пря помощи которых осуществляется рекуперативное торможение рабочих органов.
Обратная связь след.ящеге управления осуществляется ведущим // и ведомым 13 цилиндрамИ-датчиками и соединяющим pix полости трубопроводом посредством заключенного в них определенного объема жидкости, находящегося нод постоянным давлением. Поскольку объем жидкости в но.поотях цилиндров-датчиков и в соединяющем их трубопроводе постоянен, то рукоятка управления всегда будет следить за положением рабочего органа, занимая соверщенно определенные положения в зависимости от положений рабочего органа.
Давление, создаваемое в соединенных полостях и трубопроводе, возникает под действием поршня ведомого цилиндра-датчика, на который, в свою очередь, воздействует давление жидкости, подведенной от гидроаккумулятора следящей системы 12. Гидроаккумулятор следящей системы 12 выполняет две функции: поддерживает постоянное
давление (порядка 30 ата) в соединенных трубопроводом полостях цилиндров-датчиков и служит резервным баком для жидкости следящей системы. Пополнение последней производится из .идроаккумулятора / путем открытия запорных кранов 14. Питание системы обратной связи может быть осуществлено также от основной гидравлической сети через специальный редукционный клапан.
Предмет изобретения
1.Пасосно-аккумуляторный П|ривод для экскаваторов и других ма1ПИН цикличного действия с рекуперативным торможением и следящим управлением, отличающийся тем, что в целях устранения люфтов в обратной связи рабочего оборудования с рукоятками управления, а также конструктивного упроц.1ения системы обратной связи, она выполнена однопроводной2.Пасосно-аккумз ляторный привод -по п. 1, отличающийся
те.м, что в целях устранения возможности подсоса воздуха в гидравлическую систему обратной связи, жидкость в ней находится под постоянным дав.ление.м.

| название | год | авторы | номер документа |
|---|---|---|---|
| Рекуперативный гидропривод | 1960 |
|
SU149067A1 |
| Система совмещенного следящего управления | 1960 |
|
SU132572A1 |
| Насосно-аккумуляторный привод одноковшовых экскаваторов и других машин цикличного действия | 1956 |
|
SU121082A1 |
| Устройство для компенсации переносного движения в системе совмещенного следящего управления | 1960 |
|
SU135418A1 |
| Следящая система автоматического управления | 1956 |
|
SU118342A1 |
| Механизм вращения крана или экскаватора | 1958 |
|
SU118294A1 |
| Гидропривод одноковшового экскаватора | 1981 |
|
SU1004551A1 |
| Устройство для гидравлического управления фрикционными механизмами | 1947 |
|
SU83065A1 |
| Гидравлический привод одноковшового экскаватора | 1962 |
|
SU152434A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2005 |
|
RU2304667C1 |