Известна схема устройства для компенсации переносного движения в системе совмещенного следящего управления рабочим оборудованием одноковшового экскаватора и других машин. Эта схема выполнена на основе гидравлической связи между элементами управления гидравлической компенсации переносного движения.
Предлагаемая схема отличается тем, что, с целью компенсации влияния перемещения любого из элементов на движение других элементов, в ручное управление включены рабочие элементы, спаренные эпициклическими передачами, в которых угловое перемещеиие водила одной передачи компенсируется направленным в обратную сторону угловым перемещением солнечной шестерни.
Предлагаемая схема механической компенсации дает возможносгь упростить линии обратных связей, повышает чувствительность управления благодаря замене упругих гидравлических компенсаторов жесткими механическими и делает ненужной регулировку системы компенсации.
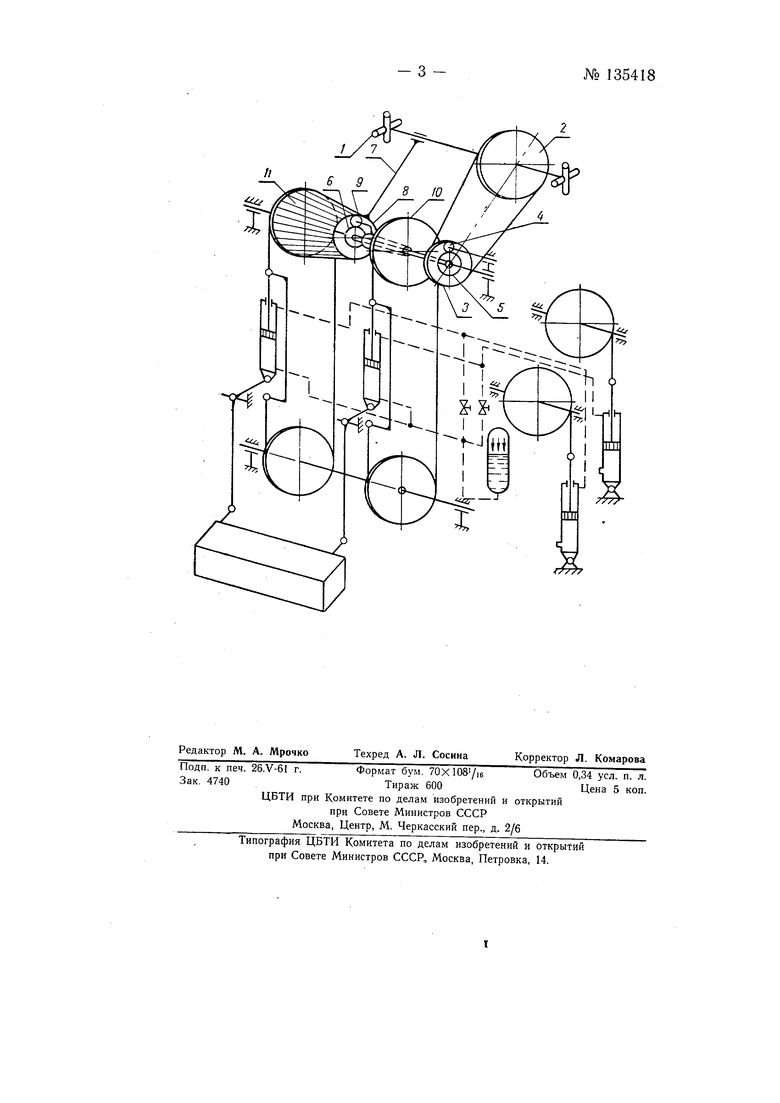
На чертеже изображена иринципиальная схема устройства механической компенсации переносного движения в системе совмещенного следящего управления применительно к рабочему оборудованию экскаватора (стрела и рукоятка с неповоротным ковшом).
При повороте ручки управления рукоятью ковшом У движение передается тросиком или цепью с блока 2 блоку-венцу 3 и от него через зубчатое колесо 4 зубчатым колесам 5 и 6, закрепленным на общей втулке. При неподвижном рычаге 7 управления стрелой жестко связанный с ним венец 8 также неподвижен и вращение получают только сателлит Я водило и блок 10, командующий распределителем движения р кояти с ковшом. Углы поворота элементов и водила при этом бхаут 2-а; о 3 6 3-, а; 52 водила-а.
№ 135418- 2 При повороте рычага 7 управления стрелой блок // будет командовать распределителем движенпя стрелы. Венец 8, жестко связанный с блоком /У, и блок-венец 3 повернутся на один и тот же угол. Блок-венец 5 передает движение зубчатому колесу 4, ось которого неподвижна, и зубчатому колесу 5, жестко связаппому с зубчатым колесом 6. Зубчатое колесо 6 передает вращение сателлиту Я который получает вращение в ту же сторону и от венца 8. Углы поворота сателлита 9 со стороны венца 5 и со стороны блок-венца 3 равны, следовательно, водило и блок 10 останутся пеподвижными.
Таким образом обеспечивается независимое управление каждым из элементов. При одновременном движении ручки управления рукоятью с ковшом / и рычага 7 управления стрелой осуществляется совместное управление двумя щарнирно связанными элементами в одной плоскости. Механическая компенсация по предлагаемой схеме может быть применена при любом количестве щарнирпо связанных элементов.
Предмет изобретения
Устройство для компенсации переносного движения в системе савмещенного следящего управления одновременно несколькими кипематячески связанными рабочими элемептами, например, одноковщового экскаватора, отличающееся тем, что, с целью компенсации влияния перемещения любого из элементов на движение других элементов, оно снабжено включенными в ручное управление рабочими элементами, спаренными эпициклическими передачами, в которых угловое перемещение водила одной передачи компенсируется направленным в обратную сторону угловым перемещением солнечной щестерни.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система совмещенного следящего управления | 1960 |
|
SU132572A1 |
| СОВМЕЩЕННОЕ СЛЕДЯЩЕЕ УПРАВЛЕНИЕ ОДНОКОВЩОВЫМ ГИДРАВЛИЧЕСКИМ ЭКСКАВАТОРОМ | 1968 |
|
SU210756A1 |
| Гидравлический привод одноковшового экскаватора | 1962 |
|
SU152434A1 |
| Насосно-аккумуляторный привод для экскаваторов и других машин цикличного действия | 1958 |
|
SU115672A1 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| Следящая система автоматического управления | 1956 |
|
SU118342A1 |
| Рекуперативный гидропривод | 1960 |
|
SU149067A1 |
| Механизм обратной связи | 1961 |
|
SU148307A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1968 |
|
SU219457A1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |