Изобретение относится к копирующему унравлению движением рабочих органов, например, экскаватора, снабженного гидравлическим приводом.
Существующее управление движениями рабочих органов экскаватора, состоящее из нескольких рычагов или кнопок отдельных для каждого вида движения, не дает возможности свободно производить доводочные и другие точные работы, так как для этого требуется одновременное включение и выключение приводов различных механизмов, обеспечивающее совмещенные движения.
Предложенное устройство устраняет этот недостаток путем объединения всех пусковых приборов в единую щарнирно-рычажную систему с одной рукояткой управления. Шарнирно-рычажная система воздействует на поршень датчиков, направляющих рабочую жидкость через исполнительные цилиндры в рабочие цилиндры, снабженные золотниковыми коробками, жестко укрепленными на их корпусах, и в точности копирует, в уменьщенном масштабе, кинематическую схему движения рабочего органа машины, например ковша экскаватора.
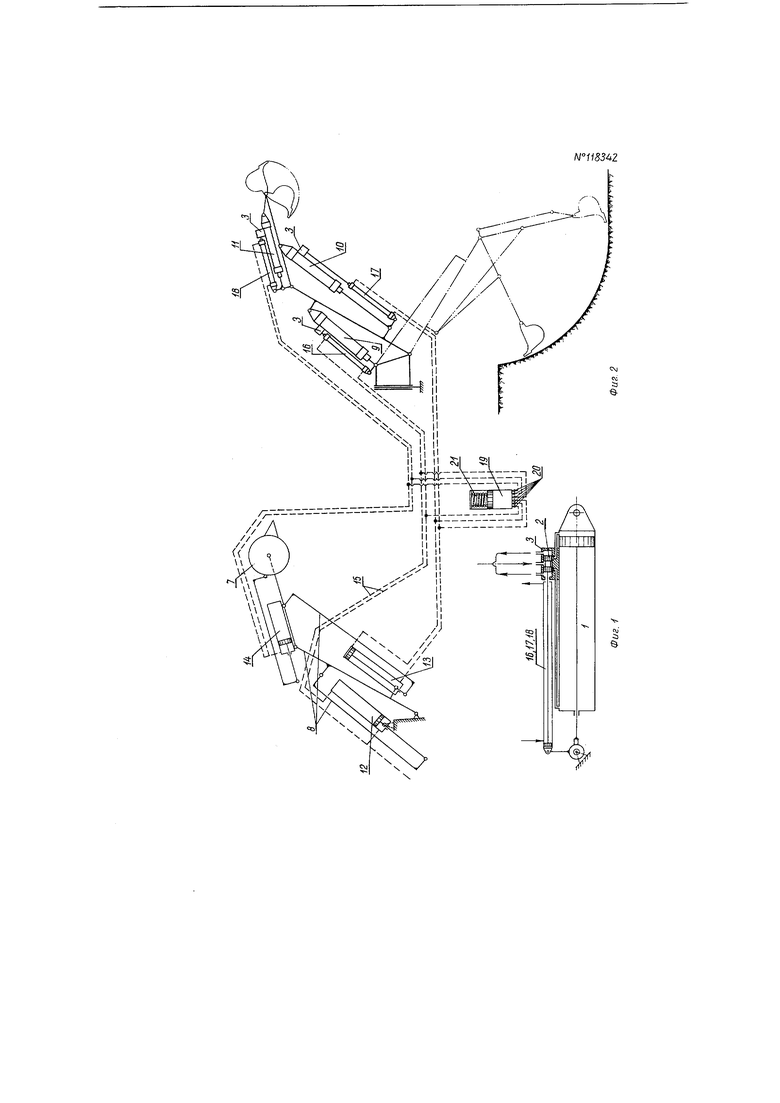
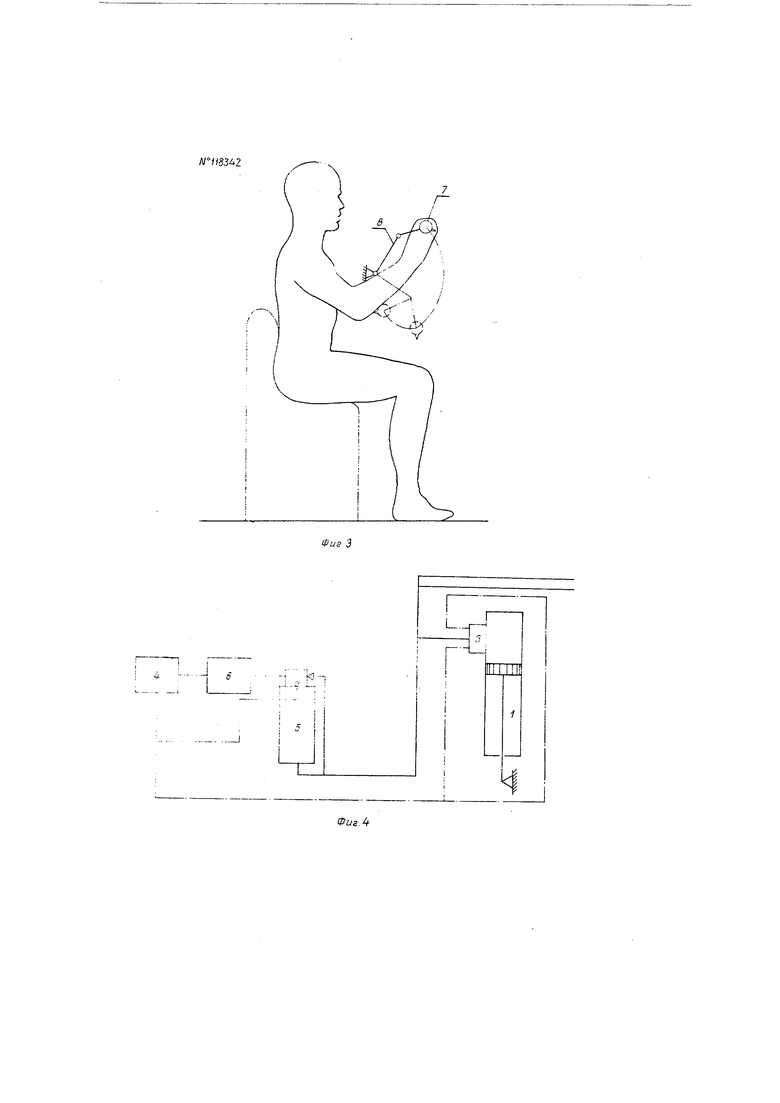
На фиг. 1 изображена схема типового рабочего цилиндра; на фиг. 2-схема следящей системы управления; на фиг. 3-рабочее положение оператора; на фиг. 4-схема гидравлического привода.
Движение отдельных элементов рабочего оборудования экскаватора (стрела, рукоять, ковщ) зависят от изменения расстояния между точками крепления соответствующего рабочего .цилиндра / и щтока (фиг. 1), т. е. перемещения порщня относительно рабочего цилиндра 1. Для точной фиксации положения рабочего цилиндра / относительно поршня и использована гидравлическая следящая система, изображенная на фиг. 2. При перемещении золотника 2 вверх относительно распределительной коробки 3, жестко закрепленной на корпусе рабочего цилиндра 1, полость высокого давления сообщается с верхней полостью рабочего цилиндра 1, а нижняя полость цилиндра-с баком 4.
№ 118342- 2 -
Масло, поступая под давлением в верхнюю полость рабочего цилиндра /, (фиг. 1 и 4) поднимает его вверх, а масло из нижней полости выжимается в бак 4. При этом распределительная коробка 3 поднимается вместе с рабочим цилиндром / и, догоняя золотник 2 в новом его положении, отсекает верхнюю полость рабочего цилиндра / от аккумулятора 5, а нижнюю-от бака 4, после чего движение рабочего цилиндра / прекращается. При перемещении золотника 2 вниз с аккумулятором 5 соединяется нижняя полость рабочего цилиндра /, а с баком 4-верхняя, что вызывает движение рабочего цилиндра / вниз. Таким образом, положение рабочего цилиндра / определяется положением золотника 2 распределительной коробки 3, для перемещения которого требуется минимальное усилие, определяемое сопротивлением перемещения уравновешенного золотника 2.
Скорость движения рабочего цилиндра 1 практически не отличается от скорости движения золотника 2, если производительность насоса 6 обеспечивает подачу необходимого объема масла.
Перемещение золотника 2 осуществляется при помощи любой связи с рукояткой 7 управления машиной. В данном случае для этого использована гидравлическая безнасосная система, в которой связь между органом управления и золотниками 2 осуществляется при помощи рабочей жидкости.
Орган управления представляет собой рычажно-щарнирную систему 8, повторяющую в определенном масштабе кинематику рабочего оборудования. Вместо рабочих цилиндров 9, 10, 11, перемещающих элементы рабочего оборудования (стрелу, рукоять и ковш) в соответствующих местах органа управления, расположены цилиндры-датчики 12, 13, 14 безнасосной системы управления, полости которых сообщаются маслопроводами 15 с полостями исполнительных цилиндров 16, 17, 18, управляющих положением золотников 2. Рабочие площади цилиндров-датчиков 12, 13, 14 больше, чем площади исполнительных цилиндров 16, 17, 18 во столько же раз, во сколько размеры рабочего оборудования (стрелы, рукояти и ковша) больще размеров органа управления. Поэтому ход поршней в исполнительных цилиндрах 16, 17, 18, а следовательно, ход рабочих цилиндров 9, 10, 11, соответственно больше, чем ход норщней в цилиндрах-датчиках 12, 13, 14.
Таким образом, при любом произвольном перемещении рукоятки 7 управления рабочий орган машины (стрела, рукоять и ковщ) копирует Б увеличенном масштабе движение рукоятки 7.
Следует указать, что предлагаемая система управления является не только следящей, но и чувствительной. Так, например, если ковщ дошел до препятствия, которое не может быть преодолено за счет давления в его рабочем цилиндре 11, то машинист сразу почувствует это, так как рабочий цилиндр 11 перестанет двигаться, а золотник 2 следящей системы упрется торцом в корпус распределительной коробки 3. При этом упор передается через соответствующие исполнительный цилиндр 18, магистраль, цилиндр-датчик 14 и рукоятку управления 7 на руку машиниста. Таким образом, обеспечиваются, с одной стороны, ограничение нагрузки за счет ограничения давления рабочей жидкости, а с другой стороны, немедленное ощущение этого предела рукой машиниста.
Шесть маслопроводов 15, связывающих цилиндры-датчики 12, 13, 14 с исполнительными цилиндрами 16, 17, 18 безнасосной системы управления, имеют один общий пополнительный бачок 19, сообщающийся с каждым маслопроводом через обратный клапан 20. Небольшой подпор, создаваемый в пополнительном бочке 19 мягкой пружиной 21, дает возможность создать в безнасосной системе постоянный небольшой подпор.
№1183 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Система совмещенного следящего управления | 1960 |
|
SU132572A1 |
| Насосно-аккумуляторный привод для экскаваторов и других машин цикличного действия | 1958 |
|
SU115672A1 |
| Гидравлический привод одноковшового экскаватора | 1962 |
|
SU152434A1 |
| Гидропривод управления экскаваторным оборудованием | 1978 |
|
SU768896A1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Гидравлический привод механизма копания | 1973 |
|
SU653356A1 |
| Устройство для гидравлического управления фрикционными механизмами | 1947 |
|
SU83065A1 |
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
| Устройство для компенсации переносного движения в системе совмещенного следящего управления | 1960 |
|
SU135418A1 |
| Гидропривод одноковшовного экскаватора | 1974 |
|
SU541946A1 |
I
