Изобретение относится к измерительной технике и может быть использовано для игдштаний акселерометров в серийного производства.
Известны центрифуги, содержащие станину, шпин,челъ5, на верхнем конце которого установлена платформа цен- трифуги с базовыми поверхностями для кр-епления испытуемых изделий, 3 нижний конец шпинделя через муфту соединен с валом приводного регулируемого электродвигателя 1 .
Однако установка испытуемых изделий на таких центрифугах осуществляется врзгчную, что приводит к большим затратам времени на подготовительные операции - установку и съем испытуемых изделий на платформу, а также на разгон и торможение платфор1 я 1.
Наиболее близкой к изобретению по технической сущности является градуировочная центрифуга, содержа™ щая шпиндель, платформу, соединен с расположенным над ней токосъемом, встроенный приводной электрдвигатель постоянного тока с польв якорем, систему управления, обеспечивающую закон задания ускорений 23
Известное устройство характеризуется недостаточно высокой производительностью, связанной с большой потерей времени на ручную установку и съем испытуемых изделий, на разгон и торможение платформы.
Цель изобретения - повьниение , пооизводительности испытаний.
Указанная цель достигается тем,что в центрифуге, содержащей станину, основную платформу, установленную в опорах станины и снабженную устроствами крепления испытуемых приборов, регулируемый привод, импуль- снь датчик скорости, шпиндель и токосъем, центрифуга снабжена дополнительной платформой, момент инерци которой по крайней мере на пО:рядок меньше момента инерции основной платформы, регулируемыми приводами вращения и поступательного перемещения дополнительной платформы, импульсным датчиком скорости вращения дополнительной платформы, контей- нерами с кольцевьми проточками, установочно-съемными приспособлениями и рычажно-клиновыми фиксаторами, причем оба импульсных датчика скорости вращения снабжены по окружности единичными метками, токосъем установлен внутри полого шпинделя на его нижнем конце, вал токо съема через сильфонную муфту связансо станиной, а дополнительная платформа установлена над основной и соосно с ней в направляющих станины с возможностью вращения и поступательного перемещения вдоль оси ее вращения, установочно-съемное приспособление закреплено на дополнительной платформе, а рычажно-клиновый фиксатор - на основной..
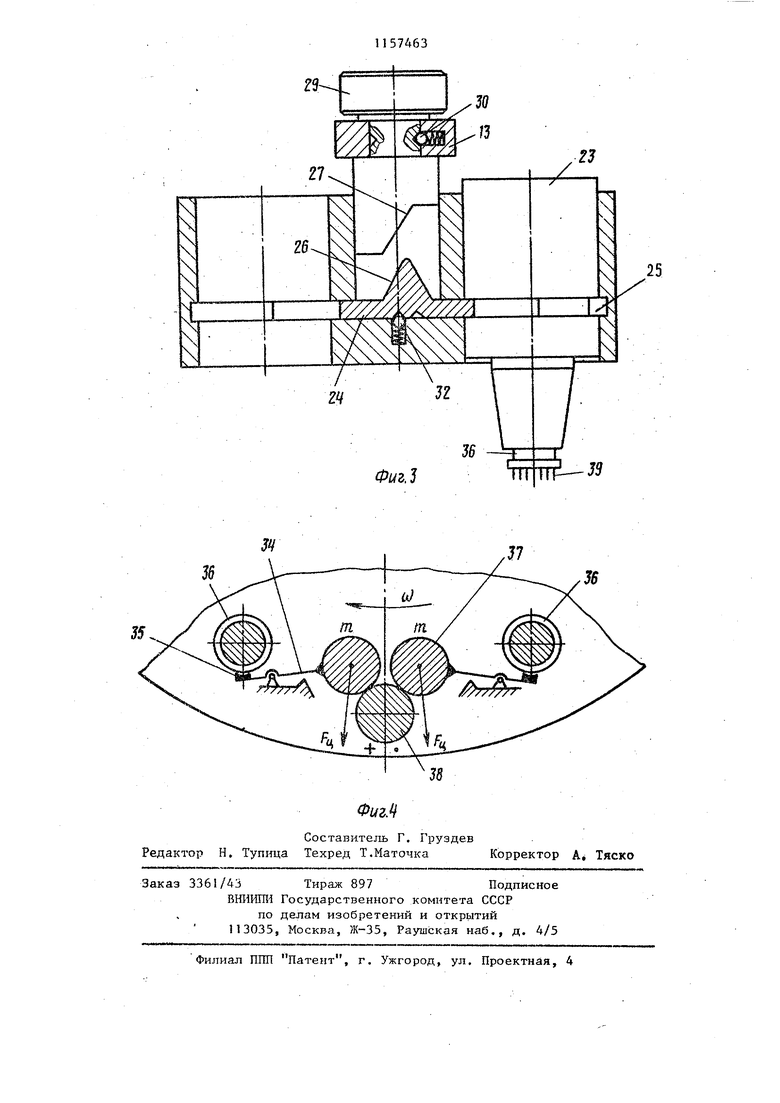
Установочно-съемное приспособление содержит корпус с двумя гнездами дпя установки контейнеров, двухсто-.ронний шиберный фиксатор, клиновый копир, направля1одие, одна из которых выполнена в виде конического пальца, ось с шариковым фиксатором, причем ось закреплена на дополнительной платформе, корпус установсч но-съемного приспособления соединен с дополнительной платформой через направляющие и пружины, одна часть клинового копира закреплена на шиберном фиксаторе, а другая - на оси с возможностью поворота ее на 180° и фиксации, рычажно-клиновый фиксатор содержит два гнезда для установки контейнеров, инерционные рычажно-клиновые. зажимы, причем одно плечо рычага снабжено клиновым фиксатором, а другое - инерционным грузом.
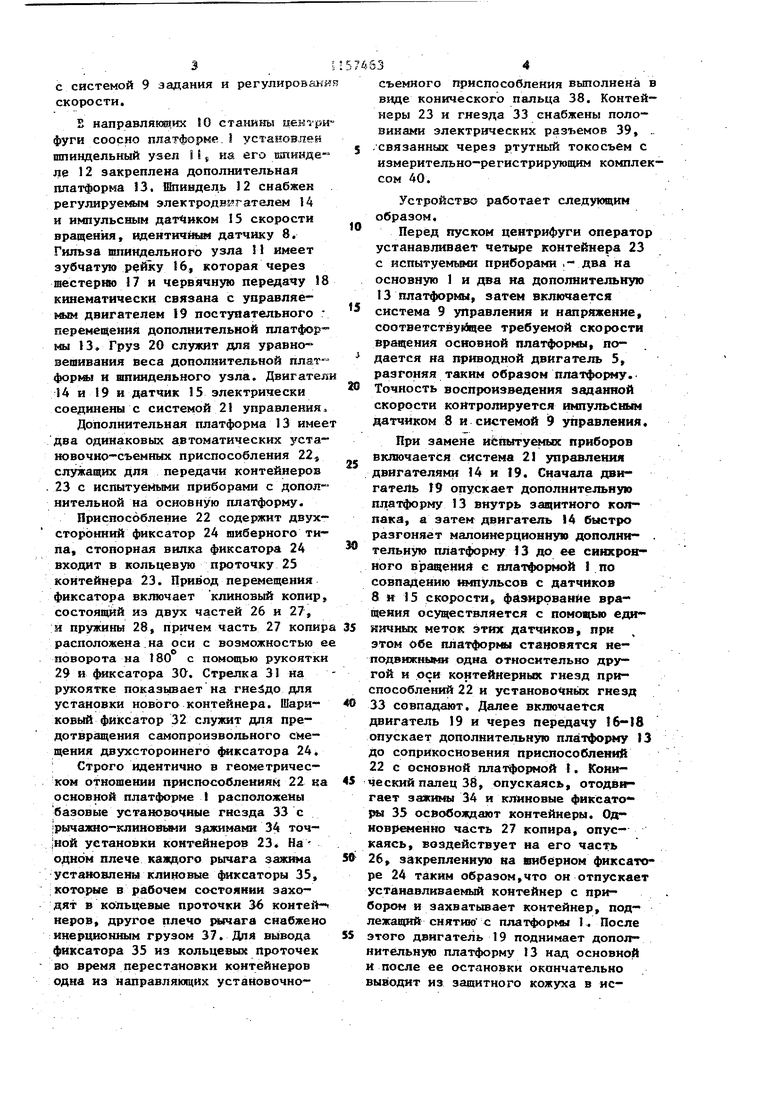
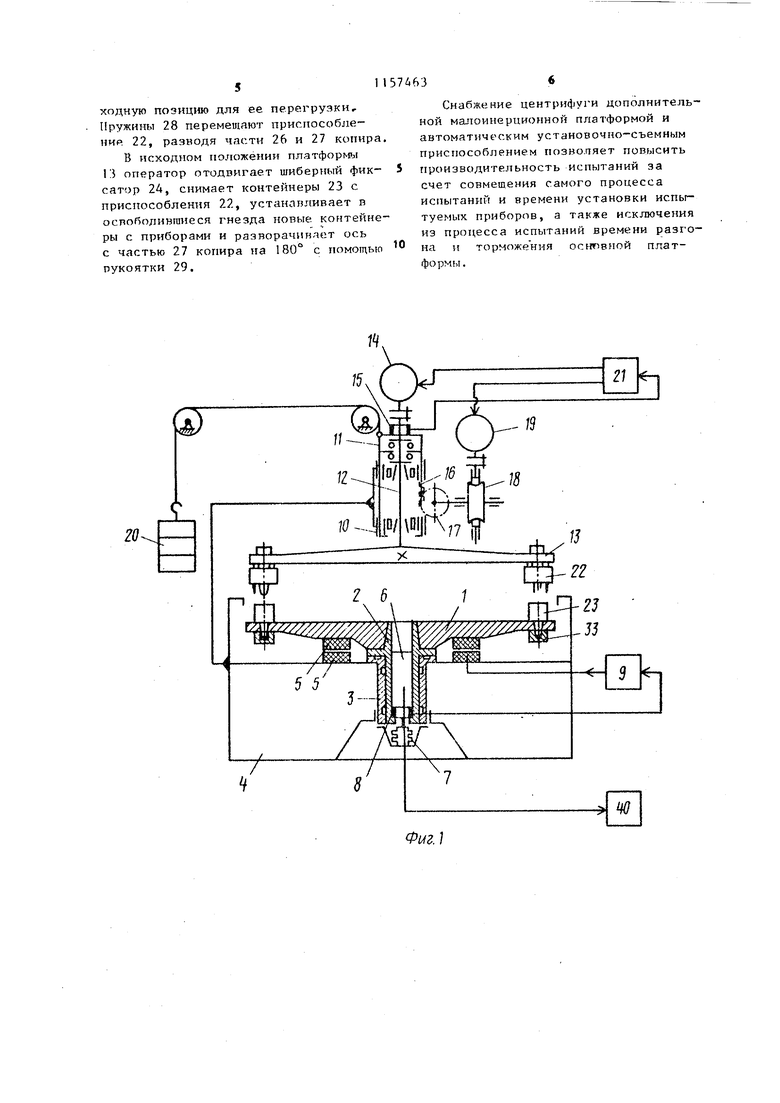
На фиг, I изображена кинематически-компановочная схема центрифуги; на фиг. 2 - установочно-съемное приспособление, общий вид; на фиг. 3 то же, разрез; на фиг. 4 - принци-г пиальная схема рычажно-клинового фиксатора.
Центрифуга содержит основную платформу 1, закрепленную на полом шпинделе 2, который установлен а опорах 3 с газовой смазкой. Между платформой I и 4 расположен встроенный приводной, электродвигатель 5 постоянного тока. Внутри полого шпинделя 2 установлен ртутный многоканальньв токосъем 6, вал которого соединен муфтой 7 со станиной 4, Go шпинделем связан ротор импульсного датчика 8 скорости вращения платформы, имеющий 400 или более импульсов на оборот, а также единичную метку. Этот датчик связан с системой 9 задания и регулирован скорости. Е направлякяцих 0 станины фуги соосно платформе, установлен шпиндельный узел П на его шпинде ле 12 закреплена дополнительная платформа 13. Шпиндель 12 снабжен регулируемым электродв гателем 14 и импульсным датчиком 15 скорости вращения, идентичный датчику 8. Гильза шпиндельного узла М имеет зубчатую рейку 16, которая через шестерню 17 и червячную передачу 8 кинематически связана с управляеtoJM двигателем 19 поступательного перемещения дополнительной платфор™ мы 13. Груз 20 служит для уравновешивания веса дополнительной плат формы и шпиндельного узла. Двигател 14 и 19 и датчик 15 электрически соединены с системой 21 управления Дополнительная платформа 13 имее два одинаковых автоматических уста новочно-съемных приспособления 22 служащих для передачи контейнеров .23 с испытуемыми приборами с дополнительной на основную платформу. Приспособление 22 содержит двухсторонний фиксатор 24 шиберного типа, стопорная вилка фиксатора 24 входит в кольцевую проточку 25 контейнера 23. Привод перемещения фиксатора включает клиновый копир состоящий из двух частей 26 и 27, :и пружины 28, причем часть 27 копир расположена на оси с возможностью е поворота на 180 с помощью рукоятки 29 и фиксатора 30. Стрелка 31 на рукоятке показывает на гнездо для установки нового контейнера. Шариковый фиксатор 32 служит для предотвращения самопроизвольного смещения двухстороннего 4 1ксатора 24. Строго идентично в геометрическом отношении приспособлениям 22 ка основной платформе I расположены базовые установочные гнезда 33 с |рычажно-клино8ыми зажимами 34 точ|ной установки контейнеров 23« На одном плече каждого рычага зажю1а установлены клиновые фиксаторы 35, которые в рабочем состоянии заходят в кольцевые проточки 36 контейнеров, другое плечо {шчага снабжено инерционшлм грузом 37. Для вывода фиксатора 35 из кольцевых проточек во время перестановки контейнеров одна из направляющих установочно534съемного гфиспособления выполнена в виде конического пальца 38. Контейнеры 23 и гнезда 33 снабжены половиками электрических разъемов 39, .-связанных через ртутный токосъем с измерительно-регистрирующим комплексом 40. Устройство работает следующим образом. Перёд пуском центрифуги оператор устанавливает четыре контейнера 23 с испытуемыми приборами ,- два на основную 1 и два на дополнительную 13 платформы, затем включается система 9 управления и напряжение, соответствуйщее требуемой скорости вращения основной платформы, подается на приводной двигатель 5, разгоняя таким образом платформу. Точность воспроизведения заданной скорости контролируется импульСньт датчиком 8 и системой 9 управления. При замене иёпытуемых приборов вкшочается система 2I управления двигателями 14 и 19. Сначала двигатеЛь J9 опускает дополнительную платформу 13 внутрь зшцитного колпака, а затем двигатель 14 быстро разгоняет мапоинерционную дополни- . тельную платформу 13 до ее синхронного вращений с платформой I по совпадению юшульсов с датчиков 8 и 15 скорости, фазирование вращения осуществляется с помощью едниичных меток этих датчиков, при этом обе платформы становятся неподвижньмк одна относительно другой и оси контейнерных гнезд приспособлений 22 и установо4нь1х гнезд 33 совпадают. Далее включается двигатель 19 и через передачу 16-18 опускает дополнительную платформу 13 до соприкосновения приспособлетсй 22 с основной платформой 1. Кони- ческий палец 38, опускаясь, отодвн- гает зажимы 34 и клиновые фиксато ры 35 освобождают контейнеры. Одновременно часть 27 копира, опускаясь, воздействует на его часть 26, закрепленную на шиберном фнксаторе 24 таким образом,что он отпускает устанавливаемый контейнер с приором и захватывает контейнер, подежащий снятшо с платформы Г. После этого двигатель 19 поднимает дополительную платформу 13 над основной после ее остановки окончательно ыводит из защитного кожуха в исходную позицию для ее перегрузки. Пружины 28 перемещают приспособ;:е НИР- 22, разводя части 26 и 27 копира.
В исходном положении плaтфop ы 13 оператор отодвигает шиберный фиксатор 24, снимает контейнеры 23 с приспособления 22, устанакливает в ослободивгаиеся гнезда новые контейнеры с приборами и разворачиг яет ось с частью 27 копира на 180° с помощью рукоятки 29.
Снабжение центрифуги дополнительной малоинерционной платформой и автоматическим установочно-съемным приспособлением позволяет повысить производительность испытаний за счет совмещения самого процесса испытаний и времени установки испытуемых приборов, а также исключения из процесса испытаний времени разгона и торможения основной платформ 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАДУИРОВОЧНАЯ ЦЕНТРИФУГА | 1987 |
|
SU1840766A1 |
| Испытательный комплекс | 1984 |
|
SU1224731A1 |
| Центрифуга | 1976 |
|
SU652488A1 |
| Стенд линейных ускорений | 1975 |
|
SU583398A1 |
| СТАНОК ДЛЯ РУЧНОЙ ОГРАНКИ ДРАГОЦЕННЫХ КАМНЕЙ | 2000 |
|
RU2187420C1 |
| УСТРОЙСТВО ДЛЯ ТРИБОМЕТРИЧЕСКИХ ИССЛЕДОВАНИЙ (ВАРИАНТЫ) | 1996 |
|
RU2109268C1 |
| ФОРМОВОЧНАЯ МАШИНА ДЛЯ РОТАЦИОННОГО ВЫДАВЛИВАНИЯ/РАСКАТКИ И СПОСОБ РОТАЦИОННОГО ВЫДАВЛИВАНИЯ/РАСКАТКИ | 2016 |
|
RU2698236C2 |
| МНОГОШПИНДЕЛЬНЫЙ ПОЛУАВТОМАТ | 1966 |
|
SU222843A1 |
| КОПИРОВАЛЬНО-ФРЕЗЕРНЫЙ СТАНОК | 1972 |
|
SU327972A1 |
| Стенд для испытания рычажно-лопастных гидроамортизаторов | 2022 |
|
RU2779327C1 |
20
| i | |||
| Способ регулирования подачи материала для обжига в шахтную печь | 1977 |
|
SU639953A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Градуировочная центрифуга | 1973 |
|
SU470744A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
