Для измерения пути, пройденного движущимся телом, применяют устройства, основанные на интегрировании ускорений по двум взаимно перпендикулярным направлениям, измеряемым с помощью двух акселерометров. В известных устройствах подобного рода акселерометр устанавливают на платформе, стабилизированной в горизонте и азимуте тремя силовыми гироскопическими стабилизаторами со следящими системамиОписываемое устройство более совершенно, по сравнению с известными устройствами подобного рода, так как оно обеспечивает более высокую точность измерений.
Это достигается тем, что в устройстве применены однокомпонентные силовые гироскопические стабилизаторы, каждый из которых имеет свои подшипники оси стабилизации. При этом датчики следящих систем, кинематически связаны с платформой и поворачиваются вокруг осей стабилизации с помощью механизмов, управляемых счетно-решающим прибором в соответствии с показаниями акселерометров и с учетом географических факторов и угловых скоростей поворота гироскопов вокруг этих осей.
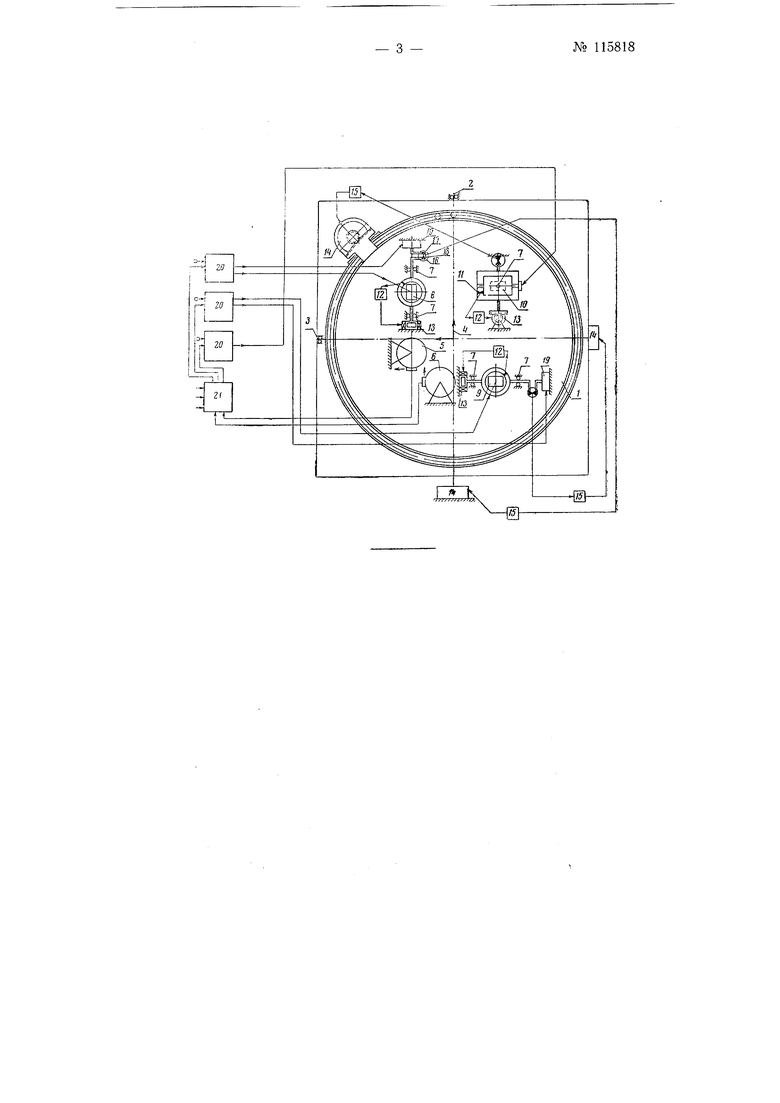
На чертеже изображена схема описываемого устройства.
Оно содержит платформу /, подвешенную в TJJCXOCHOM карданном подвесе с осями 2, 5 и 4 и гироскопически стабилизированную в горизонте и азимуте с помощью трех следящих систем.
На платформе жестко закреплены два акселерометра 5 и & и установлены на щарикоподщипниках 7 три однокомпонентных силовых гироскопических стабилизатора 8, 9 н 10 со взаимно перпендикулярными осями стабилизации.
Каждый гироскопический стабилизатор снабжен электрическим датчиком // угла прецессии, усилителел /2 и двигателем силовой стабили№ 115818- 2 -
зации 13. Каждая же ось платформы 1 сочленена с серводвигателем 14, который управляется через усилитель 15 от датчика 16 угла отклонений индекса 17, установленного на платформе относительно индекса 18, связанного с осью стабилизации соответствующего гироскопа.
В устройстве применена кинематическая связь индекса 17 с платформой 1 с помощью механизма 19 (шагового двигателя или устройства синхронной передачи угла), допускающего повороты индекса вокруг оси стабилизации. Механизмы 19 заправляются электрическими сигналами от блоков 20, которые связаны со счетно-решающим прибором 21. Этот прибор поворачивает датчики 16 следящих систем платформы /.
Механизмы 19 управляются счетно-решающим прибором в соответствии с показаниями акселерометров 5 и (5 и с учетом абсолютных угловых скоростей поворота гироскопов вокруг осей стабилизации, угловой скорости вращения земли, географической широты, ориентации горизонтальных осей относительно меридиана и расстояния тела от центра земли.
Счетно-решающий прибор 21 может также изменять по заданной программе моменты, создаваемые по осям прецессии гироскоповПредмет изобретения
Устройство для измерения пути, пройденного движущимся телом, по методу интегрирования и ускорений по двум взаимно перпендикулярным направлениям, измеряемым с помощью двух акселерометров, установленных на платформе, стабилизированной в горизонте и азимуте тремя силовыми гироскопическими стабилизаторами со следящими системами, отличающееся тем, что, с целью повышения точности измерений, в нем применены однокомпонентные силовые гироскопические стабилизации, а датчики следящих систем кинематически связаны с платформой и поворачиваются вокруг осей стабилизации с помощью механизмов, управляемых счетно-решающим прибором в соответствии с показаниями акселерометров и с учетом географических факторов н угловых скоростей поворота гироскопов вокруг осей стабилизации.