Известны разл1ичные схемы приборов для про:т ранствен1ной орментировхи летательных аппаратоз, презстазляющие собой сочетание гироскопических, акселерометрических и ннтегр;лрующих элементов. Изве1стно также, что :на работу некоторых гирО;:ког1ических приборов благоприятно ко-мпенгация ;момеНтов нагрузск (действующих по внешней оси ио,ДЕ.еса) с по/лгащько слстелшт слловой стабилизаииг,. состоящей из датчика углов прецессии. усиЛИтеля и Д1В1п-ателя оои стабилизации.
Однако П1)акт1ическое постро еи.не Г1рс :тра1нсг. ориентаторов до сих пор было .невозз.Еожно отсутствия гироскопических чувствительных элементов аостаточной точности, так лучшие извеспные до сего врелгени пироскопы с сплово стабилизациеГ обладали погрешностью порядка 1° за 1 час, что неприелктемо для прецизионных приборов пространственной орисити.розки.
Описываемый гироскопичеожий чузст эиусльаый элемент выполнен в виде поплавкового гирос-копического силового стабилизатора, высокая точность -которого обеспечивается применением в пиростабил1изаторе беамойгентпого электрического (Индукционного) датч;ика утла прецессии, гидростатической разгрузки п -1ециз1;ю(ннэ1 механической опоры, сепаратора с канавками для направлегния конвекционных течений поддерлсивающей к :идкост1к, си1М|метричного г.ироокопа, состоящего из двух од1инакавых электрических гиромоторов, и магнитоэлектричесхого генератора моментов на оси прецессий, причем для ум1еньшен;ия габаритов чувствительного элемента применена по(ддернси1вающая жидкость с большим удельным весом, порядка 2-4 г/c.vг например тетрабромэтан.
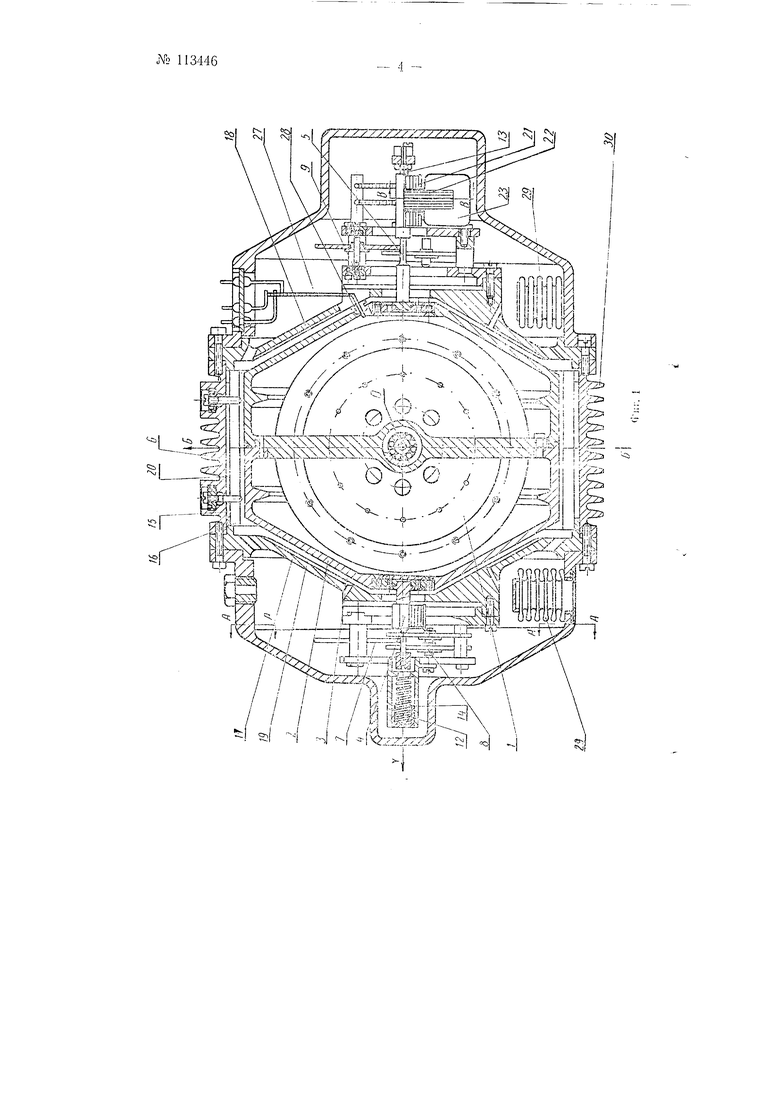
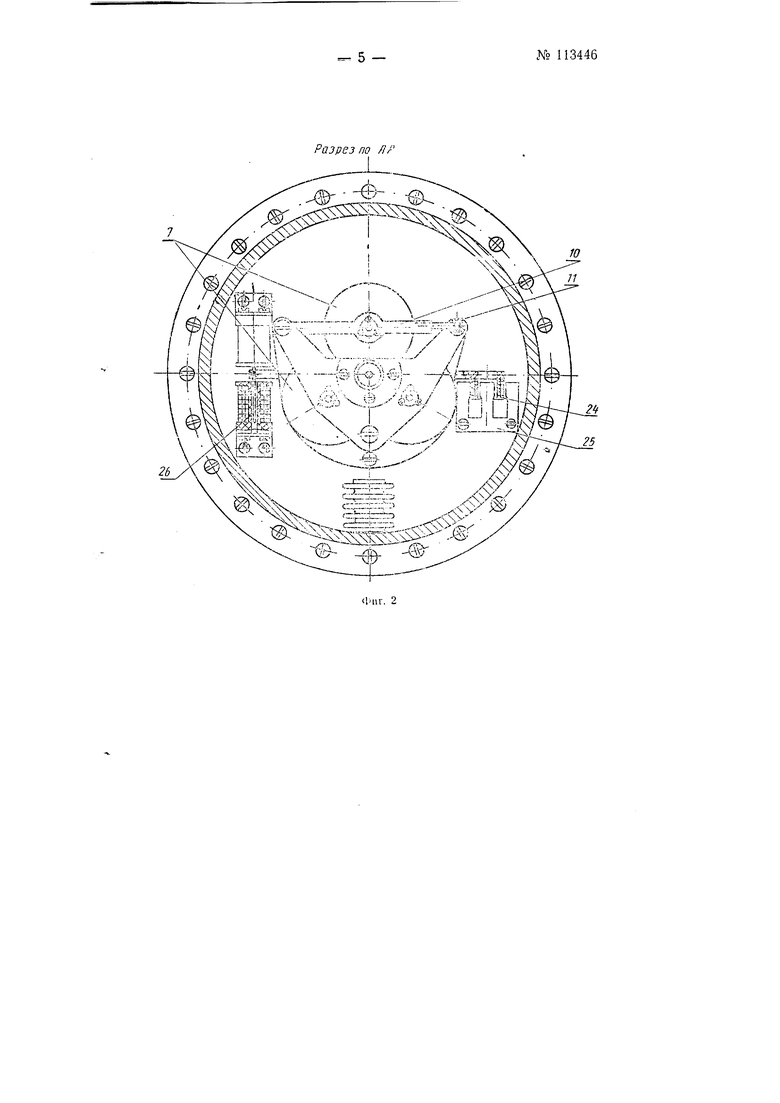
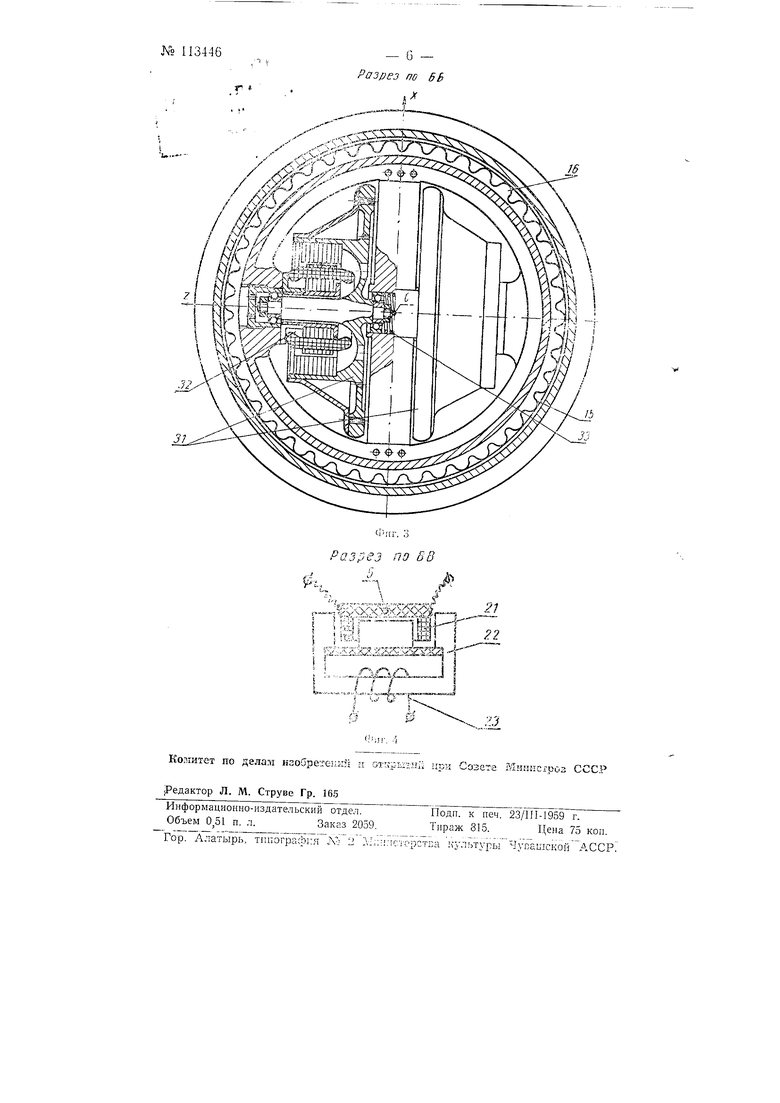
На фиг. 1 показан чувствительный элемент в разрезе; на фиг. 2- разрез по АА на фиг. 1; ма фмг. 3-разрез по ББ на фиг. 1; на ф|иг. 4- р азрез по ВВ на фиг. 1. Приняты обозначения: ОХ-ось стабилизации, ОУ-ось прецесги1И и OZ-ось собственного враш.ения электр ического ротор-ного гироскопа.
№ 113446
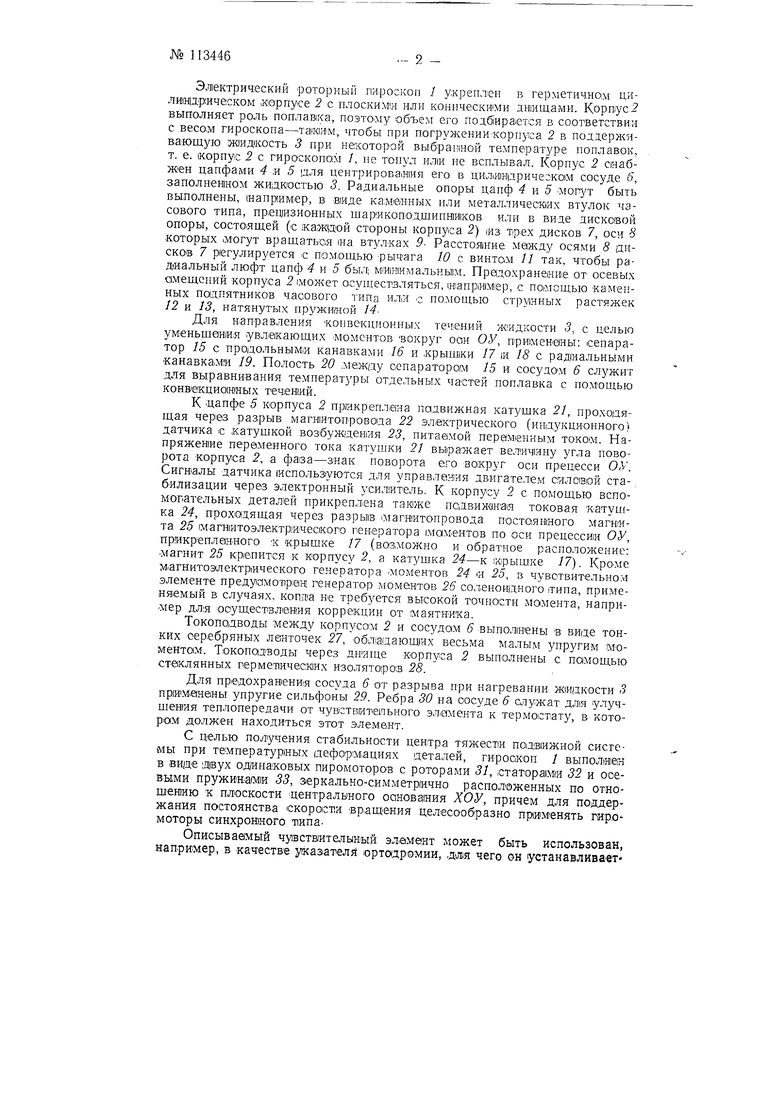
Электрический роторный пироскоп / укреплсн в герметичном цилиндрическом корпусе 2 с ПЛОСКИМ1И или коническими днищами. Корпус5 выполняет роль поплавио, поэтому объем его подб1ира.ется в соответстви-и с весо.м гироскопа- таиям, чтобы при погружении корпуса 2 в поддерлшвающую ;Ж1ид кость 3 при некоторой выбра1 |ной температуре поплавок, т. е. корпус 2 с гироскопо1м /, пе топул или пе всплывал. Корпус 2 снабжеп цапфами 4 м 5 1для пептрировалия его в цил1И1Н|дричегко1М сосуде 6, заполненном жидкостью 3. Радиальные опоры цапф 4 и 5 быть вылолпены, 1напр|им€р, в В1иде ка.мбнных пли металлических втулок часового типа, прещизионпых шарикоподшипников или в виде дисковой опоры, состоящей (с 1ка)ЖИОй стороны корпуса 2) яз тр.ех дисков 7, оси 8 -которых лгогут вращаться иа втзлках 9- Расстоя1ние между осями 8 дисков 7 регулируется с помощью рычага 10 с винтС(М 11 так, чтобы радиальный люфт цапф 4 vi 5 быд м И1Н1Имальны1м. Предохранейие от осевых смещений корпуса Сможет осуществляться, 1н:априм1ер, с помсщью каменных подпятников часового типа илл с помощью стрмнных растяжек 12 и 13, патянуты.х пружи/ной 14Для направления конвекгиюнпых течений ж идкости 3, с целью ум1еньщанн;я увл акающих iMoMcnroB вокруг оаи ОУ, применены: сепаратор 15 с продольными канавками 16 и .крышки 17 т 18 с радшальными канавкадии 19. Полость 20 .между сепаратором 15 и сосудом 6 для выравнивания температуры отдельных частей поплавка с помощью конвекциомных течений.
К щапфе 5 корпуса 2 прикрепл ена подвижная катушка 21, про.ходящая через разрыв магн1итоцрово да 22 эл.актрического (индукционного) датчика с катущкой возбуждения 23, питаемой перам енным током. Напряжение переменного тока катушки 21 выражает величину угла поворота корпуса 2, а фаза-знак поворота его вокруг оси прецесси ОУ. Сигналы датчика используются для управления двигателем саливюй стабилизации через электронный усилитель. К корпусу 2 с помощью вспомог.ательных деталей прикреплена тамже пс,движ1На1я токовая катупгка 24, проходящая через разрыв Магнитопровода постоянного магнита 25 магнитоэлектрического генератора 1мамептов по оси прецессии ОУ, прикреплйниого К крыщке 17 (ваз,можно и обратное расположение: магнит 25 крепится к корпусу 2, а катушка 24-к 1крыщке 17. Кроме м.агнитоэлектрического генератора моментов 24 1И 25, в чувотвительно: элементе пpeдylclмoтIpiaнi генератор моментов 26 сол,енои(дного типа, применяемый в случаях. копд|а не требуется высокой точности момента, например дл:я осуществления коррекции от маятника.
Токоподводы между Kopnycoai 2 и сосудам 6 выполнены в ви|де тонких серебряных ленточек 27, обладающих весьма малым упругим моменто1М. Токопалводы через дпип е корпуса 2 выполнены с помощью стеклянных гермет|ическ1их изоляторов 28.
Для предохранения сосуда 6 от разрыва при нагревании жидкости 3 приманены упругие сильфоны 29. Ребра 30 па сосуде 6 служат для улучщения теплопередачи от чувствительного эЛ|амента к термо1стату, в котором должен находиться этот элемент.
С целью получения стабильности центра тяжести подвижной системы при температурных деформациях деталей, гироскоп / выполяен в виде двух одинаковых пиромоторов с роторами 31, )Статора1М1и 32 и ооевыми пружийагми 33, зеркально-симметрично расположенных по отнощешяю к плоскости центрального оанования ХОУ, причем для поддержания постоянства CKopoicTiH вращения целесообразно применять гаромоторы синхрожного типа.
Описываемый чу1вств1ителыный элемент может быть использован, например, в качествв указателя юртодрОМии, для чего он устанавливается так, чтобы ось стабилизации ОХ была вертикальна; кроме того, он должен быть aнaбiжeн приспособлением аля учета вращения земли, например регулируемым источникам: электрического тока, соз;даю1цим с помощью магйитоэлектрического понератора момептаз 24 и 25 коррекциопный момент:
(7 siiTf, где: Н-кинетический Г1иро::копа;
/ 7,29- Ш- рад сек-угловая скорость вращения
;:-широта места.
Описывае1мый чувствительный элемент Может быть также применен для построенИЯ гироскопических ориентаторов с трехосной платформой по известным схемам. Для этого тр чувствительных элемента устаиавливаются в общед кардановам подвесе .так, чтобы их оси стабилизации Обр1азовывали прямоугольный трехгранн.ик, служащий осиаванием для установки акселерометров. При отсутст1В1ИИ управляющих моментов имеем гироскопический ориентатор с инерциальной платформой. Бели же ч;увствительные элементы получают через 1маги итозлектрические геиераторы моментов 24 и 25 управляюпие (Моменты от .интеграторов ускорений, имеем гироскопичеокий ориептатор с интеграторной коррекцией.
Предмет изобретен:ия
1. Чувствительный пр-ецизглонных пироскопических приборов для пространствагшой оргйентИ|)овкп летательных аппаратов, отличающийся тем, что он выполнен в виде роторгного пироскопа с цилищдрическим корпусом, меха|Н нче1:.ки центргаруемьим в сосуде, онабженHOiM канавками для направления конве-кционных течений поддерживающей жн;зкости -л электрического датчика поворотов вокруг оси подвеса.
2.Форма выполнения чувствительного элемента по п. 1, отличающа-яся тем, что, с целью получения стабильности центра тяжести системы при температурных дефорл;аи1иях .деталей, в нем применено два одинаковых электрических гиромотора, сг11 мметрично расположенных в общем кожухе по обе сторсны центрального осно1вания.
3.Форма выполнения чувстзительного элемента по пп. 1 и 2, отличающа.яся тем, что, с целью получения мивимальных габаритов системы в жи1дкостно1м , в качестве поддерживающей жид костм прим:енена, тяжелая жидкость, пaпpи ep тетрабромэтан.
4- Форма выполнения чувствительного элемента по пп. 1-3, отлиЧ|ающаяся тем, что для наложения коррекционных моментов на ось подвеса применено магнитоэлектрическое пр1яспособлен1ие, постоянный мапнмт которого прикреплен к знешнаму сосуду, а токовая катущка- к корпусу гироскопа.
5. Форма выполнения чувствительного злеманта по пп. 1-4, отличающаяся тем, что, € целью использования его в качестве указателя направления орт0|драмии, он установлен та горизонтальной площадке и снабжен приспособлением для учета вращения земли.
№ 113446
земли;
1 S,l i /22ZZ2Z2ZZZZZZZZ7 D
H и S.S) i Hlii .-„,
э //111 й
l,il , . /-:-- I ;
-.14 1 ч .
/
л ;i;J
№pfF
Nj
Разрез по 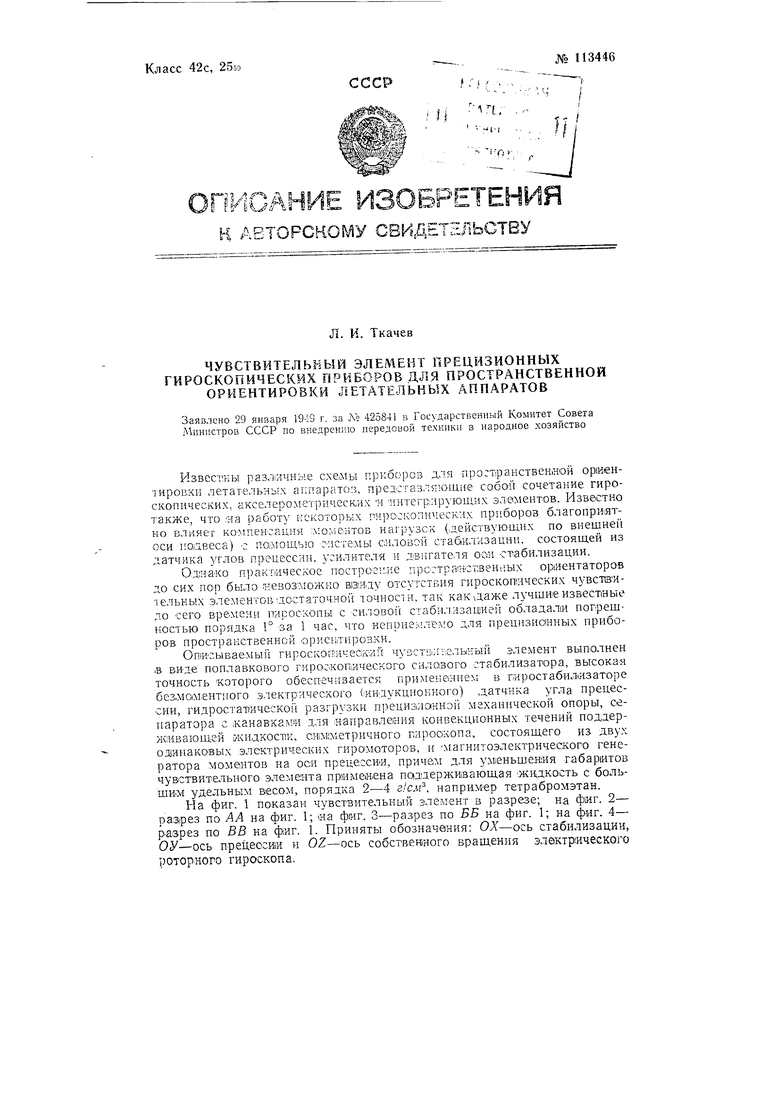
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения пути, пройденного движущимся телом | 1958 |
|
SU115818A1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1972 |
|
SU355494A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |