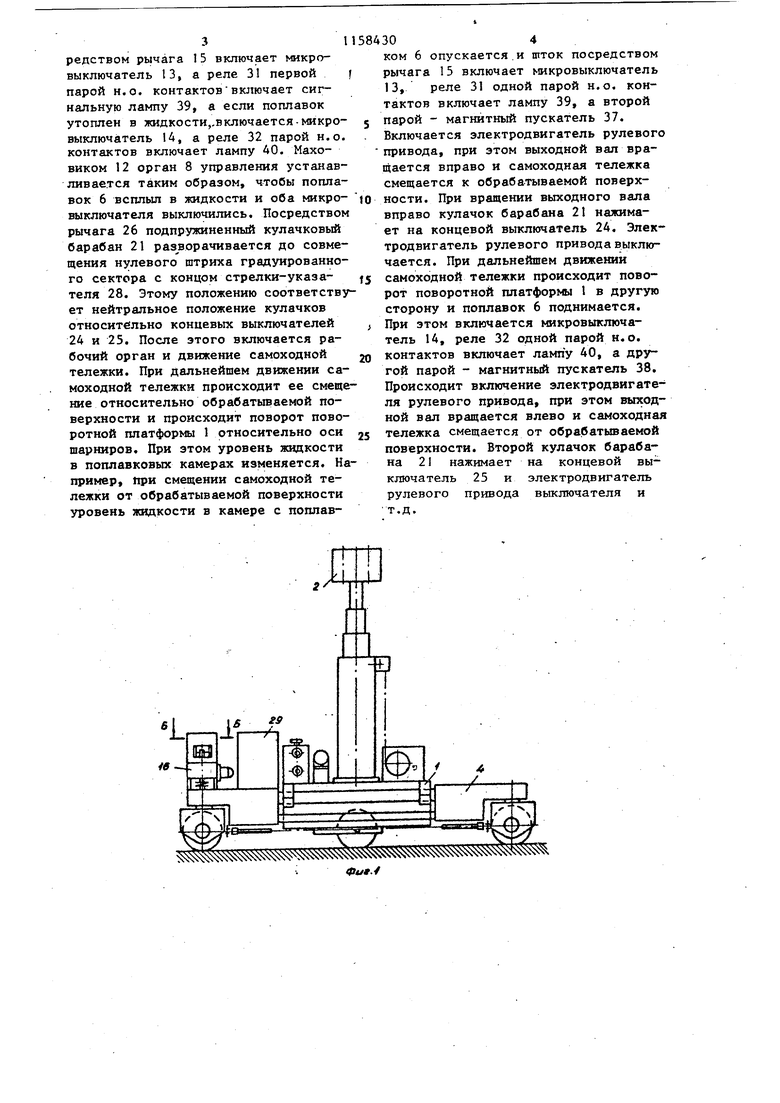
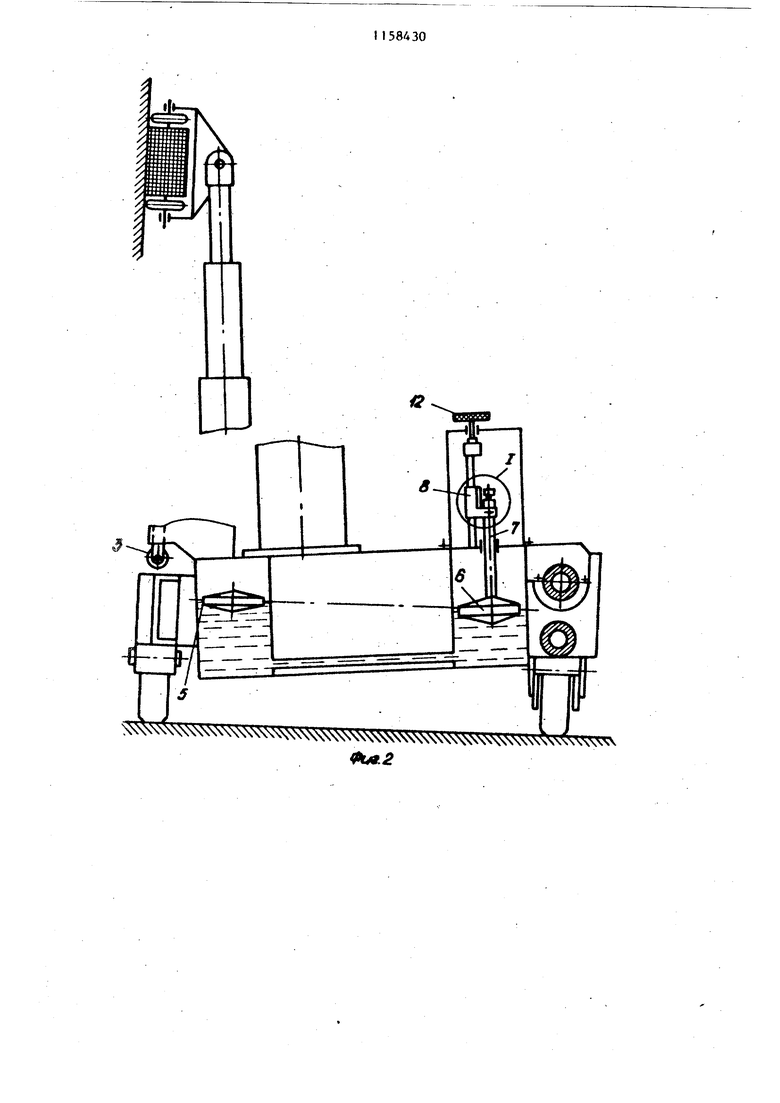
1 Изобретение относится к устройства для комбинированного управления приво ми транспортных средств,преимуществен но для автоматического управлени я движением самоходной тележки устройства для обработки бортов судна в доке, Цель изобретения - автоматизация рулевого управления путем обеспечения заданной траектории движения. На фиг. I изображена предлагаемая система; на фиг. 2 - поплавковые камеры и орган управления; на фиг. 3узел I на фиг. 2; на фиг. А - разрез А-А на фиг. 3; на фиг. 5 - разрез 4мг. 1; на фиг. 6 - разрез В-В на фиг. 5; на фиг. 7 - вид Г на фиг. 5; на фиг, 8 - электросхема управления рулевого привода. Система содержит поворотную готатформу 1 с расположенными на ней телескопической колонной с приводом и рабочим органом 2 и опорным роликом 3, шарнирно прикрепленную к само ходной тележке 4. Вилки ведущего и ведомого опорных катков самоходной тележки кинематически связаны таким образом, что при работе рулевого при вода разворот вертикальных осей вил9к происходит в разные стороны. Это обеспечивает движение тележки по дуге окружности с мгновенным центром, расположенным в пространстве в точке пересечения осей катков (не показано). В платформе расположены две сообщающиеся заполненные до половины глицерином камеры с поплавками 5 и 6. К поплавку б прикреплен шток 7, соединенный посредством выточки с органом 8 управления, передвигаемым в направляющих 9 посредством гайки 10, винта Ми маховика 12. В корпусе расположёны микровыключатели 13 и 14 и рычаг 15, входящий роликом в выточку на штоке 7. Поворотная ось вилки ведущего опорного катка соединена с выходным валом рулевого привода 16. На другом конце выходного вала закреплен кулач ковый барабан 17 с двумя кулачками 18, воздействукхцими на концевые выключатели 19 и 20, и свободно посажен кулачковый барабан 21, подпружиненны посредством пружин 22 и пальцев 23 и воддействукщий своими двумя кулачкаьбс на концевые выключатели-24 и 25, На подпружиненном кулачковом барабане закреплен рычаг 26, на 30 который воздействуют ограничительные упоры 27, закрепленные на корпусе рулевого привода. Барабаны имеют градуированные секторы, против которых закреплена стрелка-указатель 28. Элементы электроавтоматики расположены в пульте 29 управления и содержат переключатель 30, промежуточные реле 31 и 32, нормально открытые (н.о.) контакты 33 и 34, кнопки 35 и 36 ручного управления, магнитные пускатели 37 и 38 и сигнальные лампы,39 и ДО. Устройство работает следующим образом. I Переключателем 30 выключаются цепи питания промежуточных реле 31 и 32. После этого включается реверсивный электродвигатель привода движения самоходной тележки, н.о. контакты 33 Движение впереди ;и 34 (Движение назад) включают цепи управления электродвигателя рулевого привода. Кнопки 35 и 36 ручного управления включают магнитные пускатели реверсивного электродвигателя рулевого привода. При включении магнитного пускателя 37 происходит вращение выходного вала вправо и самоходная тележка приближается к обрабатываемой поверхности, при включении магнитного пускателя 38 происходит вращение влево и самоходная тележка отходит от обрабатываемой поверхности. Оперируя кнопками 35 и 36, самоходную тележку можно подвести к обрабатываемой поверхности таким образом, чтобы оси ведущего и ведомого опорных катков были перпендикулярны обрабатываемой поверхности. При прямолинейной обрабатьшаемой поверхности такому положению соответствует совмещение стрелки-указателя 28 с нулевым штрихом градуированного сектора на кулачковом барабане 17. После подвода к обрабатываемой поверхности движение самоходной тележки выключается. Посуте этогоупорныйролик 3 отводится в верхнее положение, при зтом рабочий орган прижимается к обрабатываемой . поверхности. После этого переключателем 30 включаются цепи.реле 31 и реле 32. Положение поплавка 6 относительно поверхности жидкости в камере контролируется контрольными лампами 39 и 40. Если поплавок поднят над жидкостью, то шток 7 посредством рычага 15 включает микровыключатель 13, а реле 31 первой парой н.о. контактоввключает сигнальную лампу 39, а если поплавок утоплен в жидкости,,включается-микровыключатель 14, а реле 32 парой н.о. контактов включает лампу 40. Маховиком 12 орган 8 управления устанавливается таким образом, чтобы поплавок 6 всплыл в жидкости и оба микровыключателя выключились. Посредством рычага 26 подпружиненный кулачковый барабан 21 разворачивается до совмещения нулевого штриха градуированного сектора с концом стрелки-указателя 28. Этому положению соответству ет нейтральное положение кулачков относите льно концевых выключателей 24 и 25. После этого включается рабочий орган и движение самоходной тележки. При дальнейшем движении самоходной тележки происходит ее смеще ние относительно обрабатываемой поверхности и происходит поворот поворотной платформы 1 относительно оси шарниров. При этом уровень жидкости в поплавковых камерах изменяется. На пример, при смещении самоходной тележки от обрабатываемой поверхности уровень жидкости в камере с поплавком 6 опускается.и шток посредством рычага 15 включает микровыключатель 13, реле 31 одной парой н.о. контактов включает лампу 39, а второй парой - магнитный пускатель 37. Включается электродвигатель рулевого привода, при этом выходной вал вращается вправо и самоходная тележка смещается к обрабатываемой поверхности. При вращении выходного вала вправо кулачок барабана 21 нажимает на концевой выключатель 24. Электродвигатель рулевого привода выключается. При дальнейшем движении самоходной тележки происходит поворот поворотной платформы I в другую сторону и поплавок 6 поднимается. При этом включается микровыключатель 14, реле 32 одной парой н.о. контактов включает лампу 40, а другой парой - магнитный пускатель 38. Происходит включение электродвигателя рулевого привода, при этом выходной вал вращается влево и самоходная тележка смещается от обрабатываемой поверхности. Второй кулачок барабана 2I нажимает на концевой выключатель 25 и электродвигатель рулевого привода выключателя и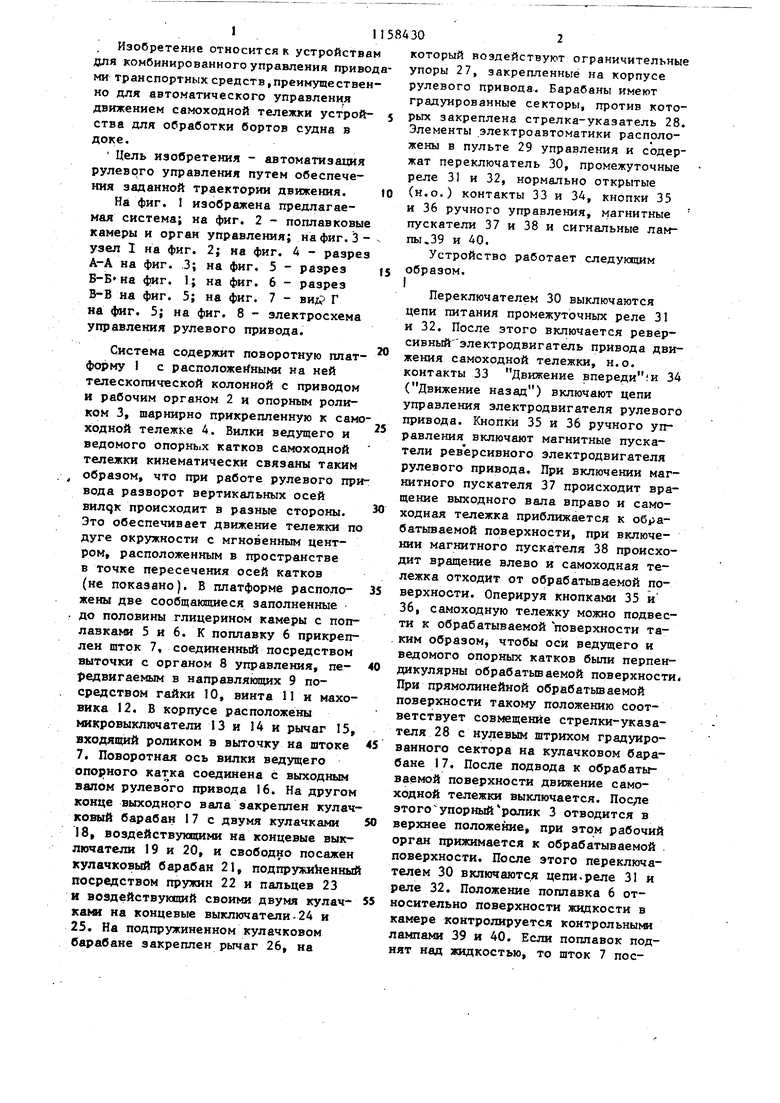
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1990 |
|
RU2032294C1 |
| Автономное устройство для определения места повреждения кабеля | 2019 |
|
RU2730384C1 |
| Устройство для обработки лещади доменной печи | 1984 |
|
SU1227420A1 |
| Устройство для программного регулирования процесса жидкостной и тепловой обработки тканей в барках | 1959 |
|
SU126931A1 |
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2008 |
|
RU2404569C2 |
| Устройство для определения места повреждения кабеля | 2018 |
|
RU2698939C1 |
| Устройство для автоматического дозирования жидких кормов | 1987 |
|
SU1475562A1 |
| УРОВНЕМЕР СЫПУЧИХ СРЕД | 1969 |
|
SU253399A1 |
| Автономное устройство для определения места повреждения кабеля | 2021 |
|
RU2777879C1 |
| УСТРОЙСТВО ДЛЯ РАЗОГРЕВА ОСНОВАНИЙ И ПОКРЫТИЙ | 1996 |
|
RU2098574C1 |
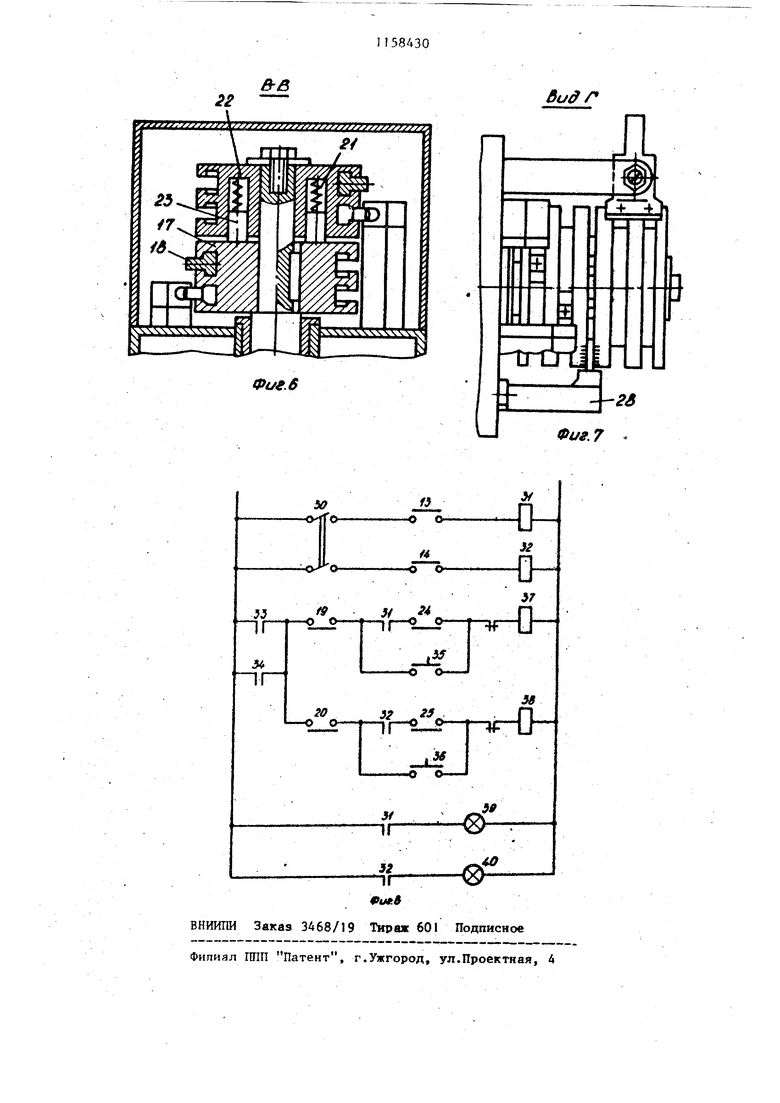
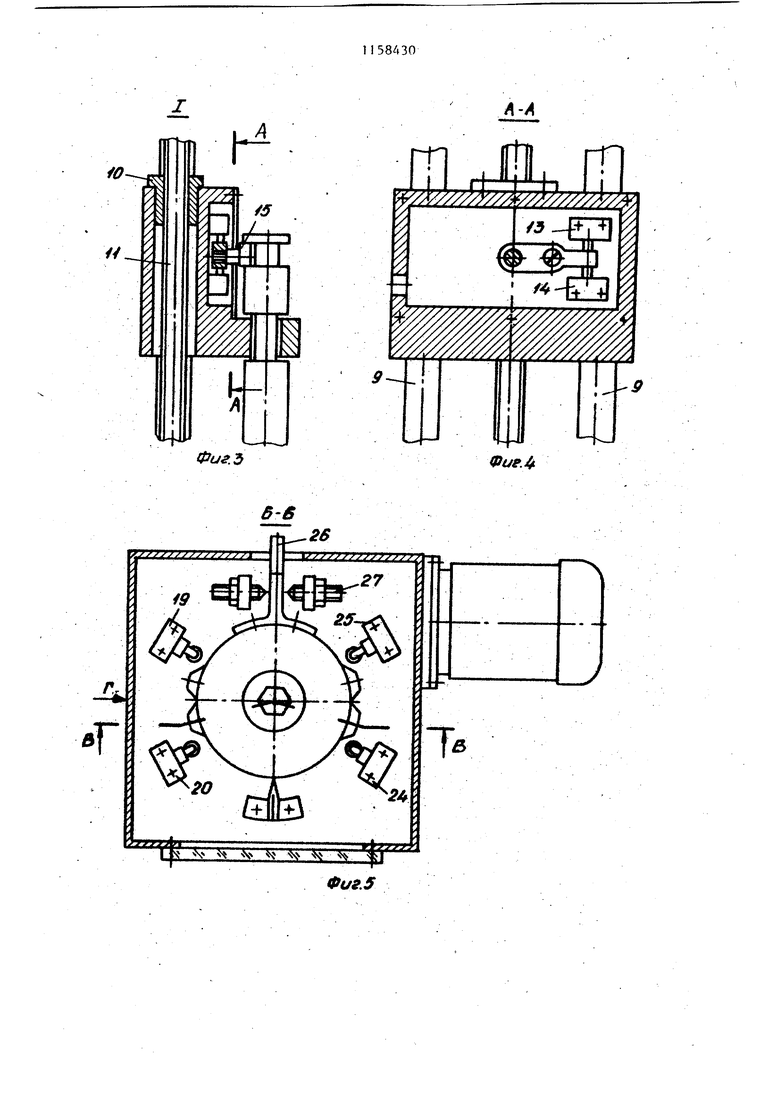
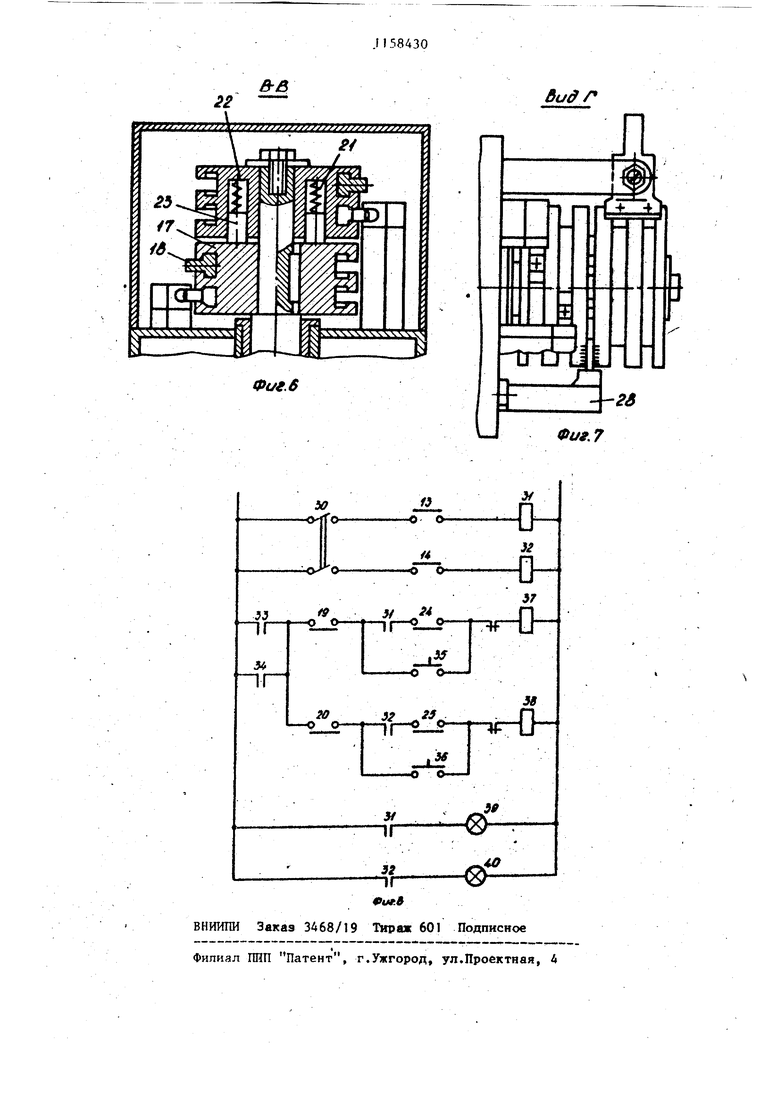
1. СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, включаетдего в себя платформу с телескопической колонной, шарнирно закрепленную на раме, содержащая механизм рулевого управления, механически связанный с управляемыми колесами, отличающаяся тем, что, с целью автоматизации рулевого уп равления путем обеспечеш1я заданной траектории движения транспортного средства, шарниры крепления платформы расположены вдоль продольной оси транспортного средства, на платформе выполнены две сообщающиеся камеры, расположенные перпендикулярно к осям шарниров крепления платформы, заполненные жидкостью, с размещенныьп в них поплавками, к одному из которых прикреплен шток, кинематически связанный с втулкой, связанный с органом управления и установленный с возможностью перемещения по направляющим, во втулке расположены два микропереключателя, установленные с возможностью взаимодействия со щтоком, механизм рулевого управления выполнен в виде злектродвигателя, механически соединенного посредством выходного вала рулевого привода с управляемыми колесами, на выходном валу жестко закреплен один кулачковый барабан для взаимодействия своими кулачками с двумя вторыми концевыми выключателями, электрическая схема включения злектродвигателя включает в себя две параллельные цепи, в каждой из которых расположены последовательно соединенные магнитный пускатель электродвигателя, по одному из концевых выключателей, взаимодействующих с каждым из барабвлов, нормально открытые контакты реле включаемого откpoпepeключaтeлями и нормально закрытые контакты магнитного О1 пускателя расположенного в противо00 4 положной цепи. 2. Система по п. 1, отличаоо о ющаяся тем, что на упомянутые барабаны нанесены градуированные секторы, а на раме закреплена стрелкауказатель.
i
фив.1
л-х
в-в
Фиг. 6
би г
5О
оО-1
оf9
W
го
ВНИИПИ Заказ 3468/19 Тираж 601 Подписное
Филиал ППП Патент, г.Ужгород, ул.Проектная, 4
Л -о о
/4 -О 6
J/ f
fr
Л-А
2г
fffffffffffffff. Tfffffffffffff fffffff ff f fjrff f
Фиг. 6
бидг
-irtTtlLJ U
| Патент США 3752248, кл | |||
| Переносный кухонный очаг | 1919 |
|
SU180A1 |
