Изобретение относится к управлеиию электродвигателями, а именно к устройствам для регулиррваиия элек родвигателей с шаговым вращением, и может быть использовано в различных областях техники, где нео6ходи1#о про средствами осув ествлять шаговые перемещения рабочего органа, преимущественно крупношаговые, с обеспечением требований по точности и быстро действию. Известен замкнутый электропривод содержащий электродвигатель постоянного тока, якорь которого подключен к выходу усилителя моииости, иаговый электродвигатель с блоком управления и дифференциальный редуктор, соединенный одним входным валом с валом двигателя постоянного тожа, другим с валом шагового электродвигателя, а выходньм валом с рабочим органом, импульсный на выходном валу дифференциального редуктора, преобразователь код-частота и реверсивный счетчик, вход сложения которого соединён с входом усилителя мощности, вход вычитания - с выходом импульсного датчика, а выходы реверсивного счетчика соединены с входами преобразователя код-частота, соединенного .выходами с входами блока управления шаговым электродвигателем til. Недостатком этого устройства является его сложность из-за наличия механического дифференциала, двух двигателей со схемами управления И специального импульсного датчика на выходном валу, которь й для обеспечения точности Должен иметь малую цену шага. Кроме того, устройство не обеспечивает отработки заданного перемещения от импульсов унитарного кода. Наиболее близким к предлагаемому по технической сущности является дис ретный замкнутый электропривод, содержащий двигатель с многофазным дат чиком положения на валу, усилитель Мощности, связанный входом с датчиком и блоком управления через сумматор к распределитель импульсов, подключенный к блоку управления И. Недостатком указанного устройства .также является его сложность, затруд няющая достижение высокой точности, совместимой с быстродействием. Для достижения требуемой точности отработки перемещений в составе привода необходимо иметк сложные устройства: прецизионный функциональный синуснокосинусный преобразователь, многоразрядный преобразователь фаза-код, постоянные запоминающие устройства, преобразователи код-аналог.. Кроме того, устройство не может осуществить отработку заданного перемещения при входном воздействии в виде унитарного кода. Цель изобретения - упрощение устройства при сохранении требований по точности и быстродействию. Поставленная цель достигается тем, что дискретный замкнутый электропривод, содержащий двигатель с многофазным датчиком положения на валу, усилитель мощности, связанный входом с датчиком и блоком управления через сумматор, и распределитель импульсов, подключенный к блоку управления, снабжен управляемыми ключами по чИслу фаз датчика положения, соединенн1мми сигнальными входами с выходами фаз датчика положения, выходами - с входами сумматора, а управляющими входами - с выходами распределителя импульсов. На фиг. 1 изображена блок-схема одного из вариантов исполнения дискретного замкнутого привода; на фиг. 2 - временные диаграммы сигналов на основных элементах схемы. Устройство содержит исполнительный двигатель 1, на валу которого установлен многофазный датчик 2, выполненный на основе синусно-косинусного вращающегося трансформатора 3 и резистивных делителей 4 и 5, напряжения, подключенных соответственно к синусной и косинусной обмоткам вращающегос-я трансформатора 3. Регулируемый объект 6 связан с валом исполнительного двигателя. Управляг-. емые ключи 7-10 сигнальнь ми входами соединены с фазами многофазного датчика 2. Сумматор 11 соединен входами с вьгходами ключей 7-10, распределитель 12 импульсов соединен вьгходами . с управляющими входами ключей 7-10. Усилитель 13 мощности сигнальнь Ь1 входом соединен с выходом сумматора 11, а входом общей точки - с общей точкой многофазного датчика 2 (средние точки делителей 4 и 5). Цепь 14 коррекции, выполненная, например, в виде обратной связипо скорости,подключена к дополнительному в ходу усилителя 13.
31
Делители 4 и 5 напряжения вьшолняют функции фазовращателей и позволяют Получить как с синусной, так и с косинусной обмоток вращающегося трансформатора 3 две фазы (О и 180 ) обеспечивая в датчике 2 четыре фазных выхода в качестве сигнальных, а пятый выход - общая точка делителей 4 и 5 - общая точка для сигнальных вьпсодов.
Многофазный датчик 2 может быть выполнен, наприь1ер, четьфехфазным на основе синусно-косинусного вращающегося траксформйтора, у которого резистивные делители 4 и 5 отсутствуют, а расщепление фаз осуществляется или аа счет допол«ительных выводов (средние точки) с синусной и косинусной обмоток, или за счет инверторов, подключенных к вьпсодам синуснс й и 1 :осинусной обмоток.
В обвгем случае многофазный датчик 2 может быть реализован или путем ра-змещения в пределах оборота датчика пространственно разнесенных обмоток, равных по количеству числу требуеМ хфа, или путем установки на валу двигателя однофазных датчиков, 1)авных гто количеству числу фаз многофазного датчика и разнесенных нулевьми положениями .на величину Шаговьпс перемещений.
Устройство работает следующим образом.
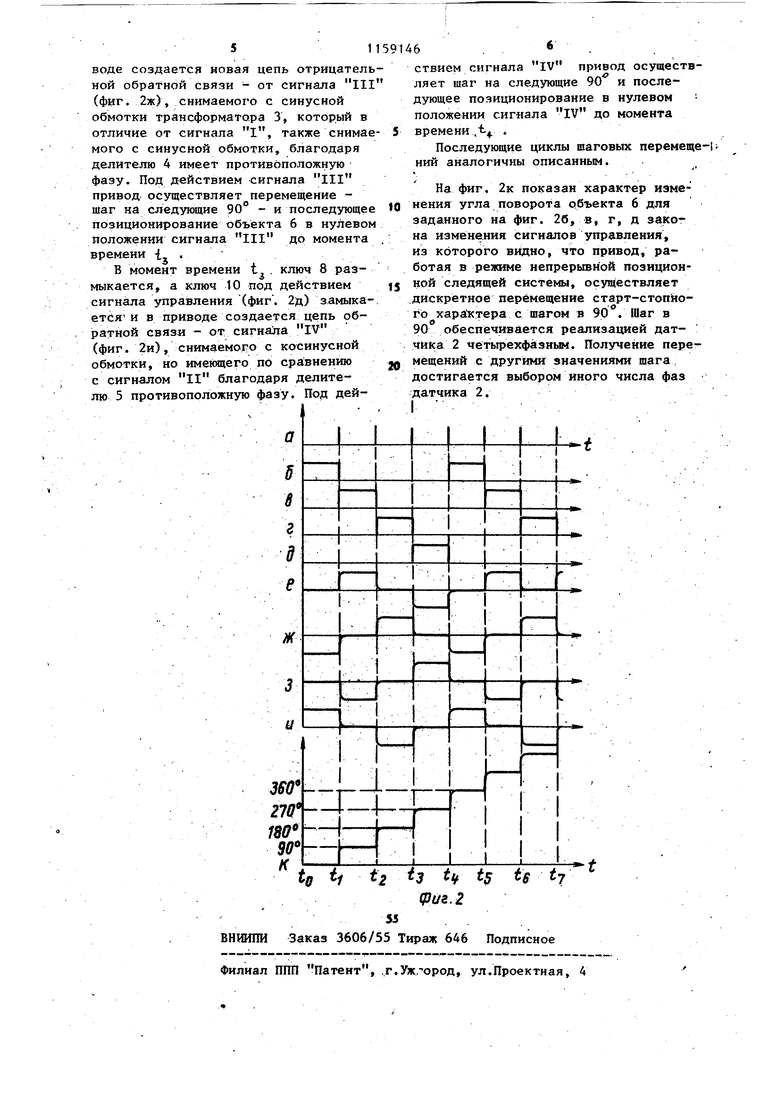
.йкпульсы управления унитарного кода (фиг, 2а) поступают на распределитель 12 импульсов, на выходах Которого формируются сигналы управления приводом (фиг. 26, в, г,д), поступающие на управляющие входы ключей 7-10.
На фиг. 2е, ж, з, и показаньг напряжения, характеризукадие уровни позиционных сигналов I, 11, Ili IV, существующих на выходах фаз датчика 2 (на выходах синусной и косинусной обмоток трансформатора 3) при наличии подключенньгх к вьпсодам обмоток делителей 4 и 5 напряжения. Эти сигналы I, , III, 1У показаны в процессе отработки приводом шагов и позиционирования после выполнения очередного шага до начала следующего шага.
В интервале времени от i до ii ключ 7 под действием сигнала управления (фиг. 2б) находится в замкнуто м состоянии, а ключи 8, 9, 10
591464
разомкнуты. В этом состоянии позиционный сигнал I с датчика 2 положения проходит на вход усилителя привода и является дл него сигна5 .лом отрицательной обратной связи. Так как в этом состоянии на вход привода,, кроме сигнала обратной связи, поступающего через ключ 7 никаких сигналов не подается, то привод 10 осуиествляет позиционирование объекта 6 в положении, задаваемом сигналом I с синусной обмотки трансформатора 3, при этом сигнал I (фиг. 2е) и управляющее напряжение 15 на двигателе Г равны нулю, а сигналы II,III, IV имеют значения, указанные соответственно на фиг.2ж, « 3, и.
В момент времени 1 сигнал управления (фиг. 2б) с ключа 7 снимается и он размыкается, ,а ключ 9 под действием сигнала управления (фиг.2в) замыкается. В этот момент времени для привода через ключ 9 создается 25 новая цепь отрицательной обратной связи - от сигнала II с косинусной обмотки трансформатора 3. Так как в этот момент сигнал II ие равен нулю и имеет значительную величиg ну (фиг. 2ж), то на двигателе 1 создается максимальное напряжение, под действием которого в приводе начинается движение в сторону уменьшения сигнала II и продолжается до достижения им нулевого значения. При нулевом значении сигнала II (фиг.2ж) привод останавливается н начинает позиционирование объекта 6 в положении, .задаваемом нулевым значением сигнала II датчика 2, сохраняя
его до момента времени t.
Так как для работы привода сигналы I и и снимаются соответственно с синусной и косинусной обмоток
трансформатора 3, а в синусно-коси- нусных вращающихся трансформаторах синусная и косинусная обмотки смещены одна относительно другой на 90° с точностью До единиц минут, то при
переходе привода с позиционного положения на участке t ... I, на позит ционное положение на участке t, ...t отрабатывает шаг в 90° с указанной точностью.
в момент времени t, , как и в момент t,, ключ 9 размыкается, а ключ 8 под действием сигнала управления (фиГ. 2г) замыкается и в приводе создается новая цепь отрицател ной обратной связи - от сигнала II (фиг. 2ж), снимаемого с синусной обмотки трансформатора 3, который в отличие от сигнала I, также снима мого с синусной обмотки, благодаря делителю 4 имеет противоположную фазу. Под действием сигнала III привод осуществляет перемещение шаг на следующие 90° - и последующе позиционирование объекта 6 в нулево положении сигнала III до момента времени i, В момент времени t . ключ 8 размыкается, а ключ 10 под действием сигнала управления (фиг. 2д) замыка ется и в приводе создается цепь обратной связи - от сигнала IV (фиг. 2и), снимаемого с косинусной обмотки, но имеющего по сравнению с сигналом II благодаря делителю 5 противоположную фазу. Под действием сигнала IV привод осуществследующие 90 и послеляет шаг на дующее позиционирование в нулевом положении сигнала IV до момента времени .tf Последующие циклы шаговых перемещений аналогичны описанным. На фиг. 2к показан характер изменения угла поворота объекта 6 для заданного на фиг. 26, в, г, д закона изменения сигналов управления, из которого видно, что привод, работая в режиме непрерывной позиционной следящей системы, осуществляет дискретное перемещение старт-стопйого xapalcTepa с щагон в 90. Шаг в 90 обеспечивается реализацией датчика 2 четырехфйзным. Получение перемещений с другими значениями шага достигается выбором иного числа фаз датчика 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU936340A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU752428A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU866570A1 |
| Устройство для управления шаговым электродвигателем | 1987 |
|
SU1520647A1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ АНТЕННЫ | 1999 |
|
RU2184991C2 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
ДИСКРБТНЬШ ЗАМКНУТгЙ ЭЛЕКТРОПРИВОД, содержащий двигатель с мнотофазным датчиком положения на валу. усилитель мощности , связанный входом с датчиком и блоком управления через сумматор, и распределитель импульсов, пoдкJШчённьJй к блоку управления, о тл и ч а ю щи и с я тем, что, с целью упрощения, блок управления снабжен управляемьми ключами по числу фаз датчика положения, соединенными сигнальными входами с выходами фаз датчика положения, выходам: - с входам сумматора, а управляняцими входами с выходами распределителя импульсов. (Л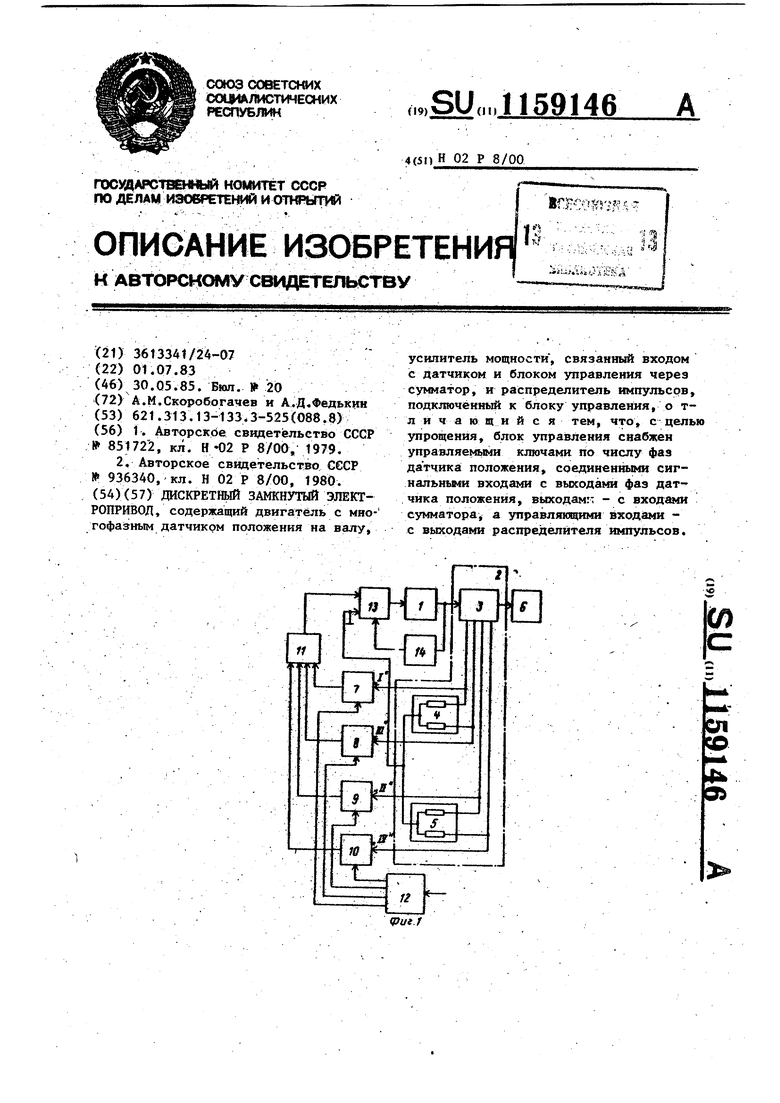
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следящий электропривод | 1979 |
|
SU851722A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
