Изобретение относится к электротехнике и предназначено для использования в электроприводах различного назначения, с плавным регулированием и реверсом, например, в системах управления антеннами, а также другими тихоходными объектами.
Цель изобретения - повышение качества управления вентильным двигателем.
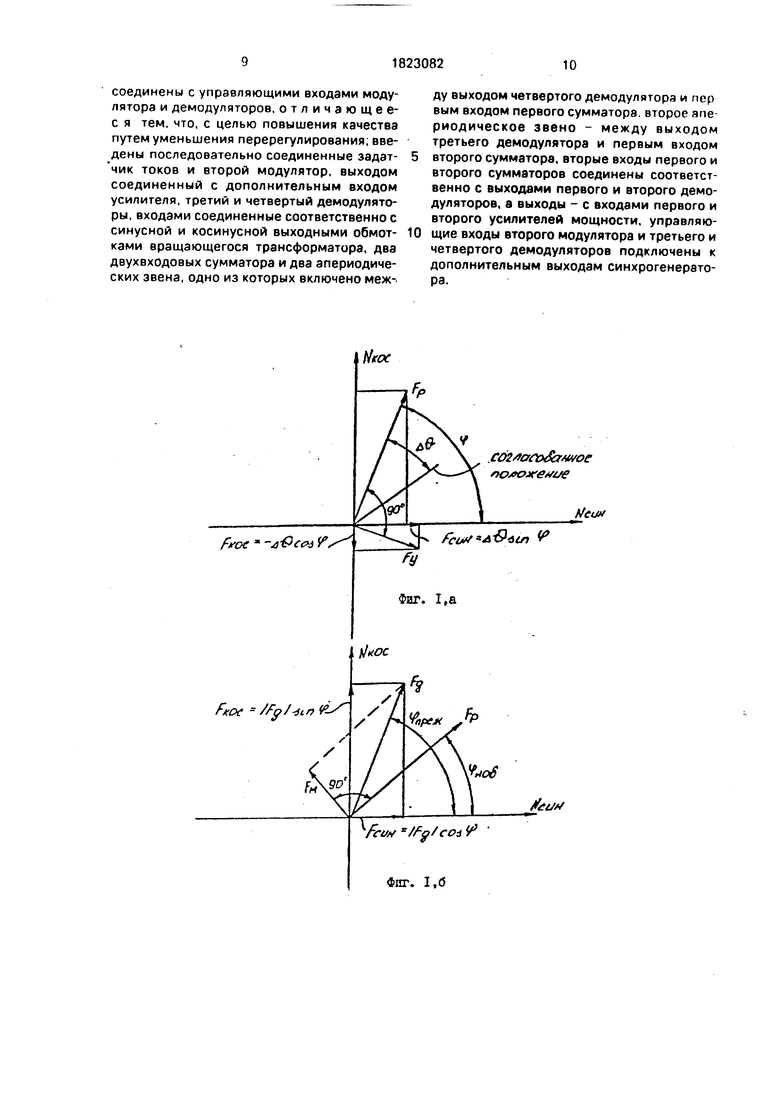
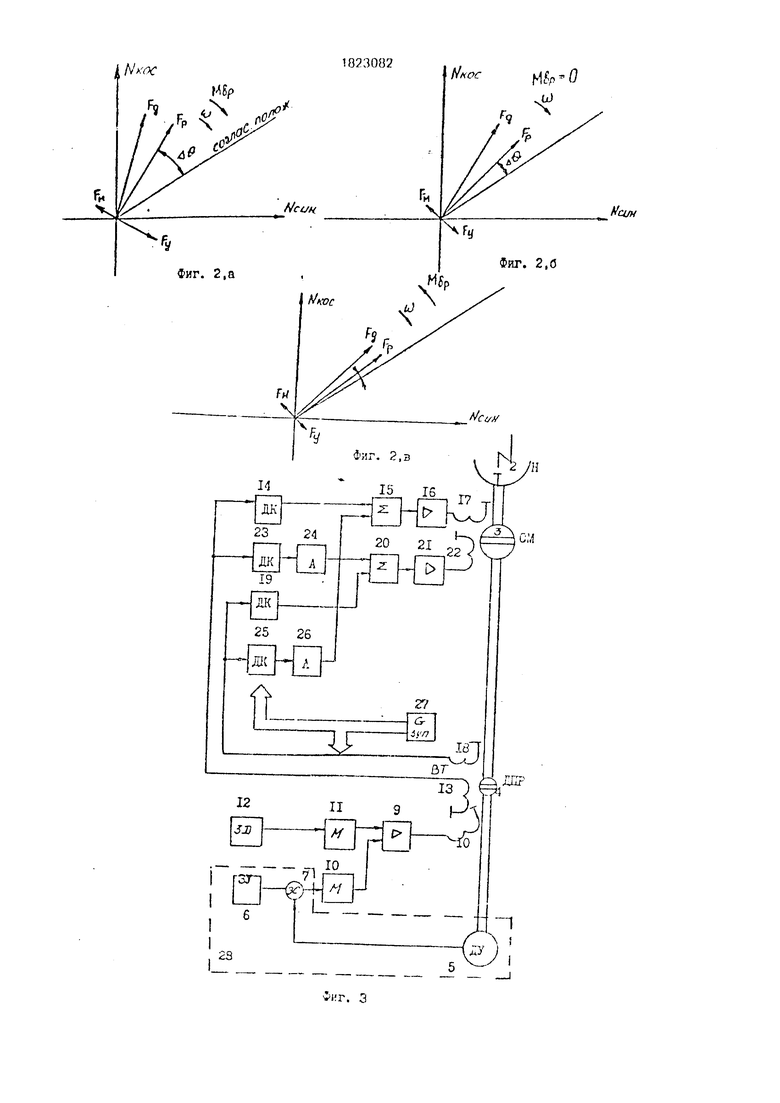
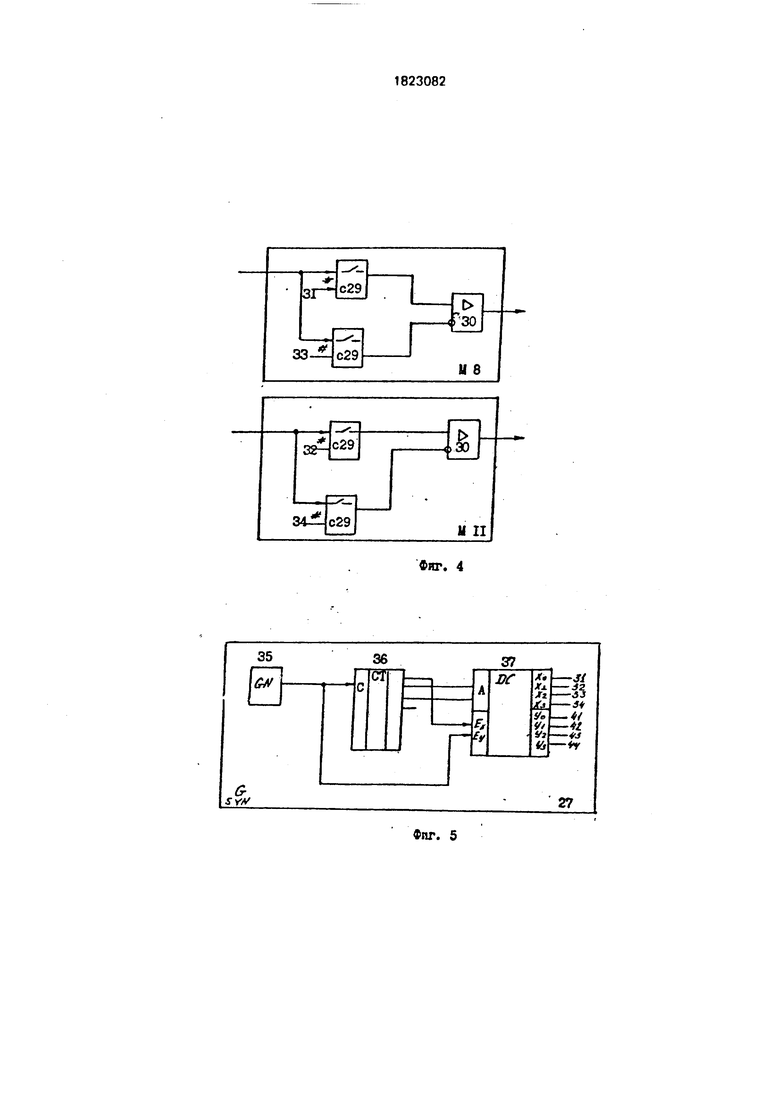
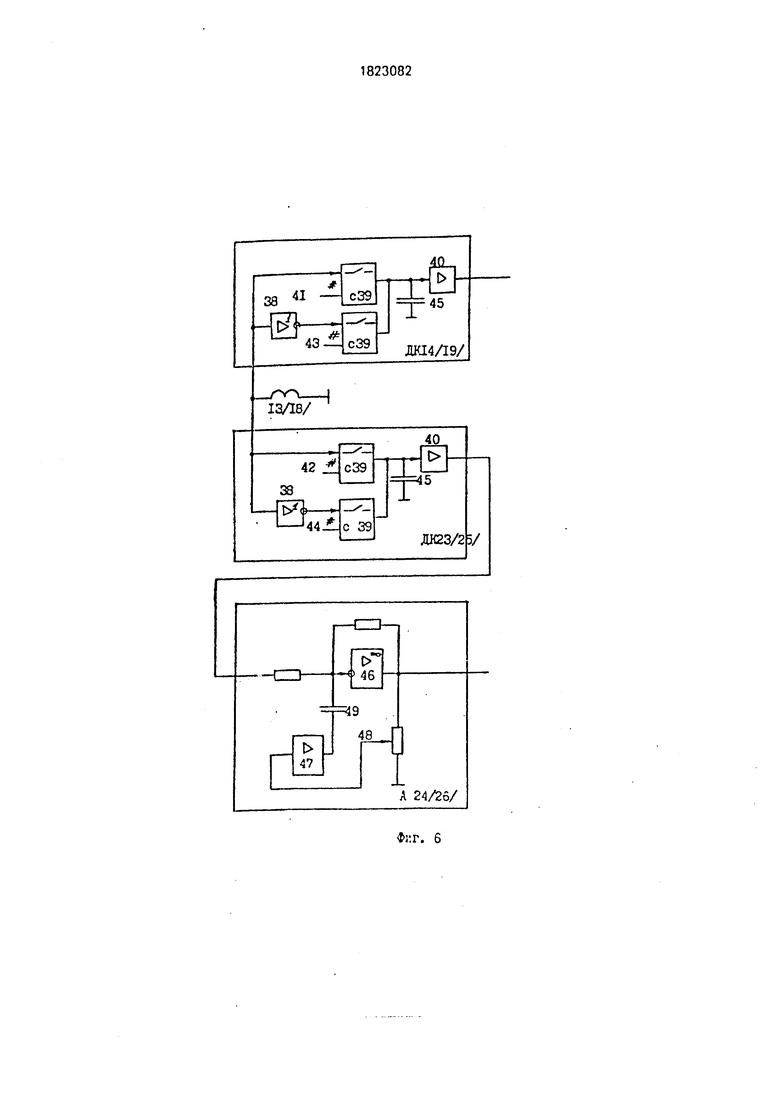
На фиг. 1 и 2 приведены векторные диаграммы, поясняющие сущность способа управления; на фиг. 3 - структурная схема безредукторного моментного электропривода следящей системы, на фиг. 4 - примеры выполнения модуляторов; на фиг. 5 - пример выполнения многофазного синхрогене- ратора; на фиг. 6 - пример выполнения демодулятора и апериодического звена; на фиг. 7-9 - представлены временные диаграммы, поясняющие работу элементов.
Сущность способа рассмотрим на примере управления вентильным двигателем на базе двухфазной машины (СМ) применительно к безредукторному приводу следящей системы по положению. Как и в прототипе, при появлении рассогласования формируют токи в синусной обмотке СМ, пропорциональные произведению угла рассогласования Л0системы на синус угла р, а в косинусной обмотке - произведению на косинус угла р между вектором мдс ротора Fp и положительным направлением вектора мдс РСИН синусной обмотки CM (NCMH, NKOC направление положительной мдс синусной и косинусной обмоток СМ). Токи обмоток СМ образуют суммарное магнитное поле статора, вектор которого (вектор управления Fy) имеет, модуль пропорциональ00
ю со
о
00
го
ный ДО, и повернут на 90 электрических градусов относительно Fp в сторону согласованного положения выходного вала. Магнитное взаимодействие векторов Fp и Fy создает вращающий момент, который раз- йорачивает вал в сторону согласованного положения и по мере уменьшения рассогласования Л# модуль Fy уменьшается. При нулевом значении Д модуль Fy равен нулю, но система приходит к согласованному положению с некоторой скоростью и за счет кинетической энергии вращающихся масс возникает рассогласование противоположного знака, которое отрабатывается таким же образом в другую сторону и т.д. При таком способе управления без дополнительных токов система получается колебательной. Теперь рассмотрим отдельно действие дополнительных токов без учета рассогласования. Дополнительные токи формируют таким образом: в синусной обмотке СМ - пропорциональные задержанному значению косинуса угла р. а в косинусной обмотке - синуса угла р. Формирование задержанных значений осуществляют передачей сигналов, пропорциональных синусу и косинусу угла р каждый через свои (одинаковые) апериодические звенья первого (или второго и более порядка). Дополнительные токи образуют дополнительный вектор мдс статора Ед, который при неподвижном роторе совпадает с вектором Fp и никакого влияния на ротор не оказывает. Если внешней силой повернуть вал СМ на небольшой угол, то вектор Рд в первый момент останется на месте прежнего положения Fp, тогда между Рди новым вектором Fp возникнет магнитное взаимодействие FM, фиг. 16, которое будет стремиться вернуть ротор в прежнее положение. Если внешнюю силу, удерживающую вал в новом положении, снять, то FM повернет ротор обратно в сторону его прежнего положения до совпадения векторов Рд и Fp, а если продолжать удерживать вал в новом положении, вектор Ед будет экспоненциально приближаться к Fp до их совмещения, так как дополнительные токи будут экспоненциально приближаться к новым значениям, пропорциональным синусу и косинусу нового значения угла р. Таким образом, вал СМ сопротивляется движению, навязанному извне, то есть возмущениям, например, ветровой нагрузке антенны. При вращении двигателя с постоянной скоростью вектор Рд будет отставать от вектора Fp на некоторый угол, определенный инерционностью апериодических звеньев, формирующих задержанные значения синуса и косинуса угла
5
у, и тем больший, чем больше скорость вращения, тем больше становится их взаимодействие - вектор FM При одновременном действии основных и дополнительных токов
происходит следующее: при большом рассогласовании |Fy| значительно превышает |FMI и ротор поворачивается вращающим моментом МВр в сторону согласованного положения фиг. 2а. По мере уменьшения рассогласования Д$ уменьшается и Fy, и наступает момент равенства модулей Fy и Ед. Тогда магнитного воздействия на ротор нет и вал продолжает поворачиваться за счет кинетической энергии фиг 26. Далее
5 уже IFy| |FMI и дополнительный вектор поля статора Рд моментом МВр уже сдерживает движение ротора фиг. 2в. Причем, скорость движения ш снижается и FM уменьшается, также уменьшается Д$и Fy, и ротор
0 плавно подходит к согласованному положению. Таким образом, достигается бесколебательный переходный процесс и плавное отслеживание задания.
Безредукторпый моментный электропривод, в качестве устройства для управления вентильным электродвигателем (фиг. 3), содержит установленные на одном валу 1 - полезную нагрузку 2, синхронную машину (СМ), включающую ротор с постоянными
0 магнитами 3, вращающий трансформатор (ВТ), служащий датчиком положения ротора (ДПР), ротор 4 которого предназначен для установки на вал вентильного электродвигателя со сдвигом на 90 эл. град, относительно
5 рогора СМ, датчик угла положения вала 5; задатчик углового положения полезной нагрузки 6, который вместе с датчиком 5 подключены к входам элемента сравнения 7, выход которого соединен со входом первого
0 модулятора 8, выходом подключенного к одному входу усилителя 9, с выходом которого соединена обмотка возбуждения 10 ВТ, синусная 13 и косинусная 18 выходные обмотки которого подключены соответственно к
5 входам первого 14 и второго 19 демодулятора, первый 16 и второй 21 усилителя мощности для подключения к соответствующим фазным обмоткам 17 и 22 синхрон ной машины, синхрогенератор 27, выходы которого
0 соединены с управляющими входами модулятора и демодуляторов; последовательно соединенные между собой задатчик IOKOB 12 и второй модулятор 11, выходом соединенный с дополнительным входом усилите5 ля 9, третий 23 и четвертый 25 демодуляторы, входами соединенные соответственно с синусной 13 и косинусной 18 обмотками ВТ, два двухвходовых сумматора 15 и 20 и два апериодических звена 24, 26,
одно из которых - 26 включено между входом четвертого демодулятора 25 и первым входом первого сумматора 15, другое апериодическое звено 24 включено между выходом третьего демодулятора 23 и первым входом второго сумматора 20, вторые входы сумматоров 15 и 20 соединены соответственно с выходами первого и второго демодуляторов 14 и 19, а выходы с входами первого 16 и второго 21 усилителей мощности, управляющие входы второго модулятора 11 и третьего и четвертого демодуляторов 23 и 25 подключены к дополнительным выходам синхрогенератора 27.
Задатчики 6 и 12, а также датчик 5 - могут быть выполнены на потенциометрах, выходами которых являются подвижные контакты, а их крайние выводы подключены к источнику напряжения. В реальных системах совокупность элементов 5, 6, 7 может являться блоком формирования сигнала рассогласования 28, например, оптико- электронный координатор наведения (Е.Г.Лебедько и др. Теория и расчет импульсных и цифровых оптико-электронных систем. Л., Машиностроение 1984, стр. 9, рис. 1.6). Каждый модулятор 8 и 11 состоит из двух ключей 29, выходы которых соединены со входами дифференциального усилителя
30,а его выход подключен ко входу усилителя 9. Синхрогенератор 27 (фиг. 5) состоит из последовательно соединенных генератора непрерывной последовательности импульсов 35, счетчика 36 и дешифратора 37, разрешающий вход которого подключен к генератору 35. Выходы дешифраторов Хо, XL X2, Хз соединены управляющими входами ключей 29 модуляторов - соединениями
31,32, 33, 34. Каждый демодулятор состоит из инвертора 38 с коэффициентом передачи, равным единице, двух ключей 39, буферного усилителя 40 с запоминающим конденсатором 45, а управляющие входы
ключей соединены с выходами Yo, Yi, Y2, Уз дешифратора 37 соединениями 41, 42, 43, 44. Апериодическое звено (фиг. 6) содержит операционный усилитель 46 и обратную связь в виде потенциометра 48, буферного усилителя 47 и конденсатора 49.
Ключи 29 и 39 могут быть выполнены на микросхемах К 590КН8 (В.С.Путников Интегральная электроника в измерительных устройствах, Энергоатомиздат, 1988, стр. 223-225), генератор 25 - на К 155ПГЗ, счетчик 36 и дешифратор 37 на элементах К 155ИЕ5, К 155ИД4 соответственно, буферный усилитель 40 с высоким входным сопротивлением на К 140УД8. все прочие усилители на операционных усилителях общего применения, например К 140УД6, К
140УД7 (А.Г.Алексеенко и др Применение прецизионных аналоговых ИС. М , Радио и связь, 1981, стр. 77, рис. 3 № 3 2)
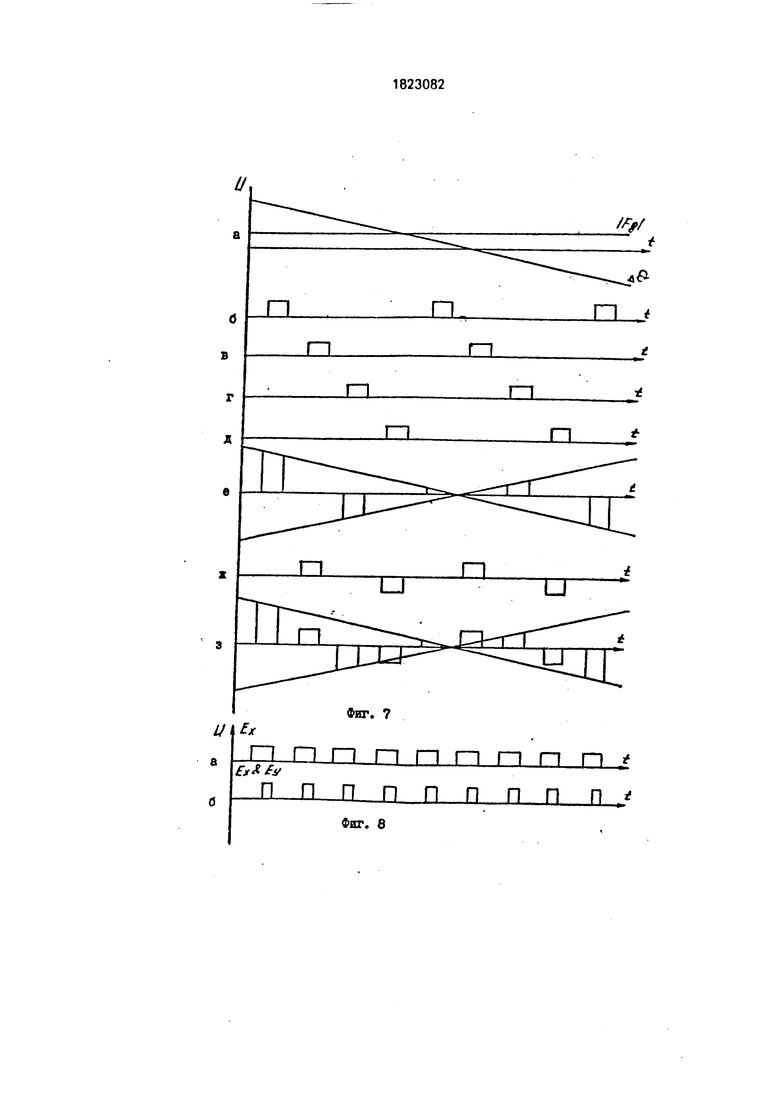
Привод работает следующим образом 5 Элемент сравнения 7 формирует напряжение, пропорциональное разности задания угла положения и элемента 6 и фактического угла положения вала от датчика 5, то есть пропорциональное угловому рассогласова0 нию Д0, которое поступает на модулятор 8. Напряжение от задатчика токов 12, пропорциональное I Рд I, поступает на модулятор 11. Счетчик 36 считает импульсы, поступающие от генератора непрерывной последова5 тельности импульсов 35, и управляет адресными входами дешифратора 37. который формирует импульсы поочередно на своих выходах Хо Xi, X2, Хз как показано на фиг. 76, в, г, д соответственно, которые по0 являются во время импульсов на входе Ех дешифратора 37 фиг. 8а. Через соединения соответственно 31, 32, 33, 34 дешифратор поочередно открывает ключи 29 модуляторов 8 и 11, и на выходе усилителя 30 моду5 лятора 8 образуются знакопеременные импульсы, пропорциональные заданному значению дополнительных токов фиг. 7ж. Усилитель 9 суммирует импульсы с выходов модуляторов 8 и 11 и подает в обмотку воз0 буждения ВТ 10, фиг. 7з, при этом сигналы рассогласования и дополнительных токов разнесены во времени и следуют поочередно, что дает возможность далее их различить. Постоянный вектор дополнительного
5 вектора |Рд| и линейно-изменяющееся значение Д# на фиг. 7а даны в качестве примера для наглядности соответствия диаграмм 7е, ж, з. Напряжения, наводимые во вторичных обмотках ВТ, пропорциональны
0 напряжению возбуждения в обмотках 10, умноженному на синус угла р в обмотке 13 и косинус угла р в обмотке 18, где р - угол между вектором мдс ротора и положительным значением направления мдс синусной
5 обмотки 17, для чего роторы СМ и ВТ соответственно сориентированы. В качестве примера на фиг. 9 показана диаграмма на - одной, скажем синусной обмотке ВТ 13, причем импульсы с линейно-изменяющей0 ся амплитудой - по рассогласованию, а со скачкообразным изменением - дополнительные. Выходы дешифратора Yo, Yi, Y2, Уз стробируются импульсами Ех & Еу, фиг. 86, поэтому импульсы серии Y короче импуль5 сов серии X и по времени внутри их, фиг. 96, в, г, д соответственно. Через соединения 41, 42, 43, 44 они поочередно замыкают ключи 39 демодуляторов 14 и 23, соединенных с обмоткой 13. а также ключи 39 демодуляторов 19 и 25, соединенных обмоткой 18. Инверторы 38 обеспечивают однополярные импульсы на выходах ключей 39, а конденсатор 45 запоминает значения амплитуд им- пульсов на время закрытого состояния ключей 39.-Таким образом, на выходах буферных усилителей 40 формируются непрерывные напряжения, причем на выходе демодулятора 14, пропорциональное рассогласованию Д0и синусу угла р, на выходе демодулятора 23, пропорциональное РД| и синусу р, на выходе демодулятора 19, пропорциональное Д0и косинусу р, на выходе демодулятора 25 пропорциональное |РД| и косинусу р. На фиг. 9е показано напряжение на выходе демодулятора 14, на фиг. 9ж - на выходе демодулятора 23, соответствующие сигналу обмотки 13 фиг. 9а. С выхода демодулятора 23 или 25 напряжение поступает на апериодическое звено 24 или 26 соответственно, осуществляющее задержку во времени как показано на фиг. 9з, величину задержки в котором можно устанавливать резистором 48. Напряжения демодулятора 14 и звена 26 суммируются на сумматоре 15, сумма усиливается усилителем мощности 16 и поступает в синусную обмотку СМ 17, то есть в обмотке 17 формируется ток, равный сумме основного тока, пропорционального рассогласованию и синусу угла р, и дополнительного тока, пропорционального значению угла f, задержанного элементом 26. Аналогично суммированием выходных напряжений элементов 19 и 24 через 20 и 21 формируется ток косинусной обмотки 22, пропорциональный сумме произведений рассогласования на косинус р и задержанного значения синуса угла р. Модуль вектора Рд можно устанавливать задатчиком 12.
Предлагаемое техническое решение имеет следующие достоинства по сравнению с известными. Действие дополнительного вектора мдс Рд поля статора сходно с действием вязкого демпфера (закрепленного на валу тела вращения, помещенного в объем с жидкостью высокой вязкости), либо воздушного или жидкого демпфера в виде поршня и камеры с дроссельным элементом, см. например, однако свойства таких демпферов заданы один раз конструктивно и трудно варьируемы. В предлагаемом решении демпфирующие свойства можно изменять в широких пределах заданием модуля вектора Рд и постоянной времени задержки. При выполнении целевой функции привода требуются дополнительные затраты энергии, для преодоления демпфера, однако такой электромагнитный демпфер
хорошо поглощает энергию свободного движения системы и, как всякий демпфер, уменьшает электромеханическую постоянную времени системы, что благоприятно
сказывается на точность отработки задания и на динамику, особенно астатических систем. Так как вентильный двигатель есть совокупность синхронной машины, ДПР, ВТ и усилительно-преобразовательного устройства (УПУ), демпфирование осуществляется формированием дополнительных токов внутри УПУ, то есть внутри двигателя, и не требует введения внешних связей и элементов типа тахогенераторов и т.п. Все эти
факторы повышают качество управления системой при сравнительной простоте и небольших аппаратных затратах на осуществление.
Формула изобретения
1,Способ управления вентильным электродвигателем, жестко связанным с полезной нагрузкой и выполненным на базе синхронной машины, при котором подают ток в фазы якорной обмотки вентильного электродвигателя, измеряют угловое положение ротора электродвигателя, сравнивают его с заданным значением и изменяют ток в каждой фазе якорной обмотки в зависимости от полученной разности по гармоническому закону, отличающийся тем, что, с целью повышения качества путем уменьшения перерегулирования, измеряют угловое положение нагоузки, сравнивают с заданным значением и изменяют фазу тока в каждой фазе якорной обмотки пропорционально полученной разности.
2,Устройство для управления вентиль- ным электродвигателем, «естко связанным
с полезной нагрузкой и выполненным на базе синхронной машины, содержащее вращающийся трансформатор, ротор которого предназначен для установки на вал
вентильного электродвигателя со сдвигом на 90 эл. град, относительно ротора синхронной машины, задатчик и датчик углового положения полезной нагрузки, подключенные к входам элемента сравнения, выход
которого соединен с входом первого модулятора, выходом подключенного к одному входу усилителя, с выходом которого соединена обмотка возбуждения вращающегося трансформатора, синусная и косинусная
выходные обмотки которого подключены соответственно к входам первого и второго демодуляторов, первый и второй усилители мощности для подключения к соответствующим фазным обмоткам синхронной маши- ны, синхрогенератор, выходы которого
соединены с управляющими входами модулятора и демодуляторов, отличающее- с я тем. что, с целью повышения качества путем уменьшения перерегулирования; введены последовательно соединенные задат- чик токов и второй модулятор, выходом соединенный с дополнительным входом усилителя, третий и четвертый демодуляторы, входами соединенные соответственно с синусной и косинусной выходными обмотками вращающегося трансформатора, два двухвходовых сумматора и два апериодических звена, одно из которых включено меж-.
0
ду выходом четвертого демодулятора и пер вым входом первого сумматора, второе апе риодическое звено - между выходом третьего демодулятора и первым входом второго сумматора, вторые входы первого и второго сумматоров соединены соответственно с выходами первого и второго демодуляторов, а выходы - с входами первого и второго усилителей мощности, управляющие входы второго модулятора и третьего и четвертого демодуляторов подключены к дополнительным выходам синхрогенерато- ра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Преобразователь угол-код | 1974 |
|
SU495690A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| Электропривод | 1973 |
|
SU746826A1 |
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1288833A1 |

Использование: в системах управления антеннами и другими тихоходными обмотками. Сущность: в способе управления при изменении тока в фазе якорной обмотки синхронной машины изменяют и фазу тока пропорционально разности между измеренным угловым положением нагрузки и заданным его значением. 1 с.п. ф-лы. 9 ил. е
froe -л-Оссъ V.
fxoc - /fff/4m VL
.CO2/toto&r«voe ю омге#Ј/е
f/euff
У
kW
11
fcw/fiy/еолР
fet/#
Фпг. 1,6
U
ft
V/
сСПГ
ег
d«W
Л7У
/V
о.
II
ZI
гвокяп
ЗЙ
с29
,&
If II
Фиг. 4
Фиг. 5
38
41
V -1--J .„ #
43--
13/18/
42
38
с39
с39
тг45
ДК14Л9/
40
F
ДН23/2
5/
А 24/26/
Ф::г. 6
В
/V
Фиг. 9
| Беленький Ю.М | |||
| и др | |||
| Опыт разработки и применения бесконтактных моментных приводов | |||
| С., Механизация и автоматизация производственных процессов | |||
| -Л.: Знание, 1989, с | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1046864A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
