Предлагаемое устройство может быть приспособлено для любого токарно-винторезного станка без изменения его конструкции. Его особенностью является применение эксцентрикового механизма, в котором пневматический или гидравлический привод посредством храпового механизма поворачивает эксцентрик после каждого прохода на угол, определяемый количеством зубцов храпового механизма.
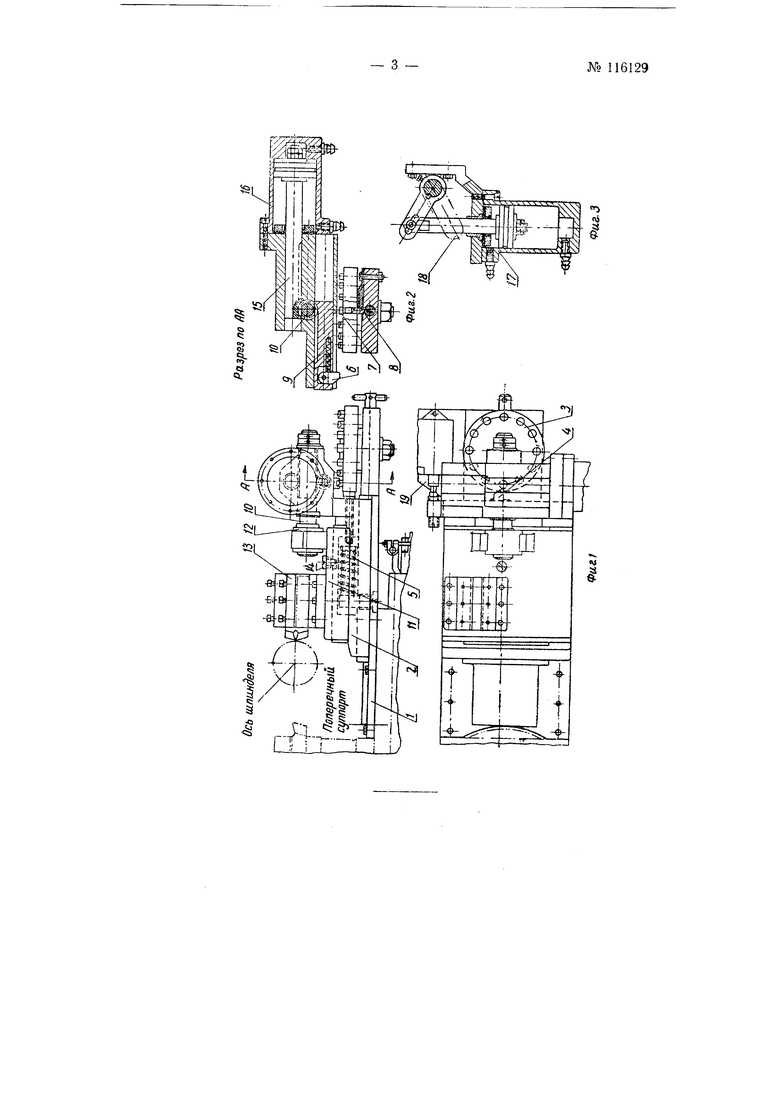
На фиг. 1 предлагаемое устройство показано в двух проекциях; на фиг. 2 - разрез поЛЛ на фиг. 1; на фиг. 3-разрез гдироцилиндра у зад.ей бабки станка.
На суппорте токарно-винторезного станка крепится плита J, по которой передвигается нижний суппорт 2. Передвижение суппорта 2 осуществляется эксцентриковым механизмом 3, эксцентрик которого нажимают на палец 4. Палец 4, связанный с суппортом 2, прижимается к эксцентрику пружиной 5. Поворот эксцентрика осуществляется собачкой 6 храпового механизма, которая при своем движении захватывает один из шти4)тов 7.
Поворот эксцентрика в обратном Направлении невозможен, так как его задерживает защелка 8. Количество штифтов зависит от заданного количества проходов. Собачка 6 получает движение вместе с рейкой 9 от шестерни, сидящей на валике 10, снабженном на конце нарезкой. При полном повороте валика 10 суппорт 11 перемещается на шаг нарезки валика посредством гайки 12. На суппорте // кренится резцедержатель 13, в котором устанавливается резец для нарезания резьбы. Перемещением суппорта 11 осуществляется быстрый отвод и подвод резца в пределах канавки для упора-- болта 14.
Поворот валика 10 осуществляется штоком 15 гидравлического (или пневматического) привода 16.
Для переключения направления вращения шпинделя станка и ходового винта на торце станка (у задней бабки) установлен гидравлический
№ 116129
{или пневматический) цилиндр П, шток которого качает рычаг 18, переключающий фрикцион станка.
По окончании нарезания резьбы, благодаря наличию на эксцентрике 3 уступа, палец 4 соскакивает в начальное положение, одновременно посредством конечного выключателя 19 станок, останавливается.
Предмет изобретения
Устройство для автоматизации нарезания резьбы на токарно-винторезном станке, отличающееся тем, что, с целью подачи резца на врезание, применен эксцентриковый механизм, в котором для поворота эксцентрика после каждого прохода служит храповой механизм, кинематически связанный с пневматическим или гидравлическим приводом.