11 Изобретение относится к микроманн пуляторам, обеспечивающим малые, но точные перемещения инструмента. Цель изобретения - плавное движение и стабильное поддержание положения микроинструмента. На фиг. 1 схематически представле микроманипулятор вид сбоку; на фиг.2 разреэ А-А, на фиг, 1, на фиг. 3 одна из возможных схем средства зада ния и поддержания температуры каждого из термоуправляемых устройств перемещения микроинструмента{ на фиг. 4 - схема поясняющая расчет пер мещения конца микроинструмента. Микроманипулятор содержит (фиг.1) устройство осевого (продольного) перемещения микроинструмента, установ ленное в корпусе 1. Корпус 1 с устро ством осевого перемещения расположен в каркасе 2. На корпусе 1 укреплено червячное колесо 3, связанное с червяком 4. На каркасе 2 установлены прижимная гайка 5 и ограничитель 6. Между корпусом 1 и каркасом 2 расположена конусная фиксирующая втулка 7 Каркас 2 установлен на шарнире 8 с устройством жесткой фиксации каркаса 2, например, стопорным винтом (на фиг. 1 не показан). Шарнир 8 укреплен на теплоизоляторе 9, которьй уст новлен на конце горизонтальной биметаллической пластины 10. На биметалл ческой пластине 10 закреплены термочувствительный элемент 11 и нагревательный элемент 12, связанные со сре ством 13 задания и поддержания темпе ратуры, причем вход средства связан с термочувствительным элементом 11, а выход - с нагревательным элементом 12, Горизонтальная биметаллическая пластина 10 другим своим концом закреплена на теплоизоляторе 14, который установлен на конце вертикальной биметаллической пластины 15, другой конец которой закреплен на теплоизоляторе 16. Теплоизолятор 16 установлен на основании, например, микроско па (не указан). На вертикальной биме таллической пластине 15 расположены термочувствительный элемент 11 и нагревательный элемент 12, связанные с средством 13 задания и поддержания температуры. Горизонтальная биметаллическая пластина 10 окружена тепловьфавнивающим экраном 17, Вертикальная биметаллическая пластина 15 окружена тепловыравнивающим экраном 18 0 .2 Для-лучшего температурного выравнивания на внешней поверхности каждого из тепловыравнивающих экранов 17 и 18 расположены термочувствительный элемент и пленочный нагреватель, связанные с регулятором температуры экрана (эти элементы не указаны), обеспечивающие при необходимости поддержание требуемой температуры экрана с точностью 0,1 град и выше. . Одна из возможных сред средства задания и поддержания температуры каждой из биметаллической пластин представлена на фиг. 3 (на фиг. 3 представлена схема для горизонтальной пластины 10, для вертикальной пластины 15 схема аналогична). Само средство 13 на фиг. 3 ограничено пунктирной линией. На пластине 10 укрешен термочувствительный элемент 11, например термометр сопротивлений. Термометр сопротивлений 11, пассивный резистор 19 и переменный резистор 20 соединены по мостовой схеме. К измерительной диагонали моста подключен регулятор 21 температуры пластины. Выз;од регулятора 21 подключен кнагревательному элементу 12, например распределенному пленочному нагревателю, укрепленному на пластине 10. Подвижный контакт переменного резистора 20 соединен с валом электродвигателя 22, например шагового, который связан с блоком задания скорости двигателя 23. Предлагаемое устройство работает следующим образом. Для выбора правильного положения микроинструмента вращают червяк 4. Вращение червяка 4 передается червячному колесу 3 и связанному с ним корпусу 1с расположенным в нем устройством осевого перемещения микроннструмента и укрепленному на нем микроинструменту, тем самым обеспечивается вращение микроинструмента относительно оси. Правильность положения микроинструмента относитепьно объекта контролируется при помощи микроскопа. Правильным положением считается такое положение, при котором прогиб шкроинструмента направлен вверх,После выбора правильного положения микроинструмента корпус 1 неподвижно фиксируется в каркасе 2 прижимной гайкой 5 и конусной втулкой 7, Вращение гайки 5 обеспечивает перемещение втулки 7 до упора в корпус , тем самым обеспечивается фиксация корпуса 1 в каркасе 2. Усилие прижима и воспроизводимость осевого смещения при фиксации обеспечивается ограничителем 6. Предварительное (на чальное) положение устройства осевого перемещения задается вращением каркаса 2 на шарнире 8. После чего каркас 2 неподвижно фиксируется на шарнире 8, например, стопорным винтом (не указан). Предварительное перемещение обеспечивается микрометрическими подачами (не указаны). Точные перемещения микроинструмента обеспечиваются следующим образом. Блок задания скорости вращения двигателя 23 (фиг. 3) задает програм му вращения вяла двигателя 22, напри мер непрерывное вращение вала с постоянкой скоростью или дискретное вращение вала с наперед заданной величиной шага и скоростью внутри шага При этом вал двигателя 22, связанный с подвижньм контактом переменного ре зистора 20, обеспечивает перемещение подвижного контакта в соответствии с з данной программой. Сигнал с подвижного контакта переменного резистора 20 сравнивается мостовой схемой с сигналом, поступающим с термочувствительного элемента 11. Разность сигналов поступает на регулятор 21 температуры биметаллической пластины 10. Регулятор 21 температуры усилива ет разностный сигнал и передает его на тепловой исполнительный элемент, который изменяет температуру пласти ны 10 так, чтобы разность сигналов с измерительной диагонали моста свест к нулю, т.е. при этом обеспечивается равенство. сигналов с термочуствитель ного элемента 11 и переменного резистора 20, что обеспечивает программный нагрев и охлаждение пластины 10 При неподвижном контакте переменного резистора 20 регулятор 21 обеспечивает постоянную температуру пластины 10 с точностью 0,01-0,001 град. Подвижный контакт переменного резистора 20 имеет переключение на ручное управление (не указано),которое обеспечивает ручное задание темпе)атуры пластины 10с точностью 0,0 0, град при поддержании заданной температуры пластины с точностью 0,010,001 град.. Изменение температуры . биметаллической пластины вызывает ее Изгиб. Горизонтальная биметаллическая пластина 10 закреплена одним концом в теплоизоляторе 14. Поэтому при ее нагреве будет перемещаться вертикально противоположный конец 10 с закрепленным на нем устройством осевого перемещения микроинструмента причем пластина 10 расположена так, что ее нагрев вызывает перемещение конца пластины 10, например, вниз, а ее охлаждение - перемещение конца пластины 10 вверх. Вертикальная биметаллическая пластина 15 одним концом неподвижно закреплена в теплоизоляторе 16, Поэтому при ее на-греве горизонтально будет перемещаться цротивоположньй конец пластины 15 с закрепленным на нем теплоизолятором 14 и биметаллической пластиной 10. Причем пластина 15 расположена так, что ее нагрев вызывает перемещение конца пластины 15, например, влево, а ее охлаждение - перемещение конца пластины 15 вправо. Таким образом, вертикальный изгиб горизон.тальной биметаллической пластины 10 обеспечивает перемещение микроинструмента в вертикальном направлении, а горизонтальный изгиб вертикальной биметаллической пластины 15 обеспечивает перемещение микроинструмеита в горизонтальном направлении. Для уменьшения влияния изменения температуры окружающей среды на температ у пластин и влияния температуры одной пластины на температуру другой пластины каркас 2 закреплен на конце пластины 10 через теплоизолятор 9, пластина 10 закреплена на конце пластины 15 через теплоизолятор 1А, пластина 15 закреплена на основании, например, микроскопа через теплоизолятор 16. При зтом пластины окружены тепловыравнивающими экранами, температура которых поддерживается с точностью выше 0,. Для обеспечения режима охлаждения rehaieparypa экрана задается на несколько градусов ниже теьтературы пластины. Точность вертикальных и горизонтальных перемещений микроинструмента составляет (1-2)«10 мкм. Диапазон необходимых микроперемещений, например от 5 мкм до 10 мкм, обеспечивается подбором материалов биметаллических пластин и выбором их геометрических размеров. Для более равномерного прогрева исполнительного элемента вместо биметаллических пластин могут быть применены
биметсшлические стержни, имеющие в сечении, например, круг.


| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1982 |
|
SU1102669A1 |
| Микроманипулятор | 1983 |
|
SU1261789A1 |
| Устройство для работ с микроскопическими объектами | 1982 |
|
SU1042734A1 |
| ОТОПИТЕЛЬНОЕ УСТРОЙСТВО С ТЕРМОЭЛЕКТРИЧЕСКИМ ГЕНЕРАТОРОМ И ТЕРМОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2010 |
|
RU2419749C1 |
| Термоэлектрический генератор с защитой от перегрева | 2024 |
|
RU2828101C1 |
| Терморегулятор | 1990 |
|
SU1774317A1 |
| Установка для прецизионных работ с микрообъектами | 1980 |
|
SU1008688A1 |
| Устройство для манипулирования объектами в закрытой камере | 1987 |
|
SU1472248A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ТЕПЛОВОЙ И ГИДРОСТАТИЧЕСКОЙ ЭНЕРГИИ В МЕХАНИЧЕСКУЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Б.Ф.КОЧЕТКОВА | 1992 |
|
RU2032834C1 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ | 1994 |
|
RU2097823C1 |

МИКРОМАНИПУЛЯТОР, содержащий корпус из двух пластин и устройство крепления микроинструмента, о тличающийся тем, что, с целью плавного движения и стабильного поддержания положения микрринструмента, корпус выполнен из биметаллической пластины с термостабилизацией.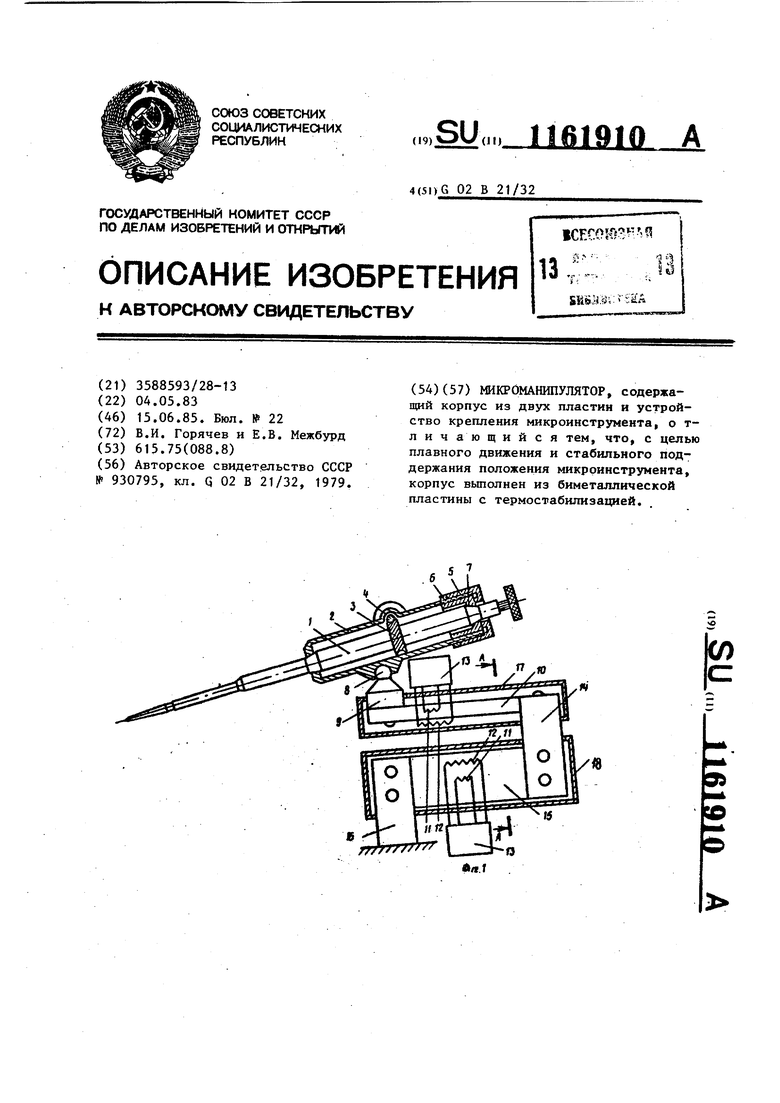
12
/3
| Устройство для изучения биопотенциалов биологических объектов | 1979 |
|
SU930795A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
