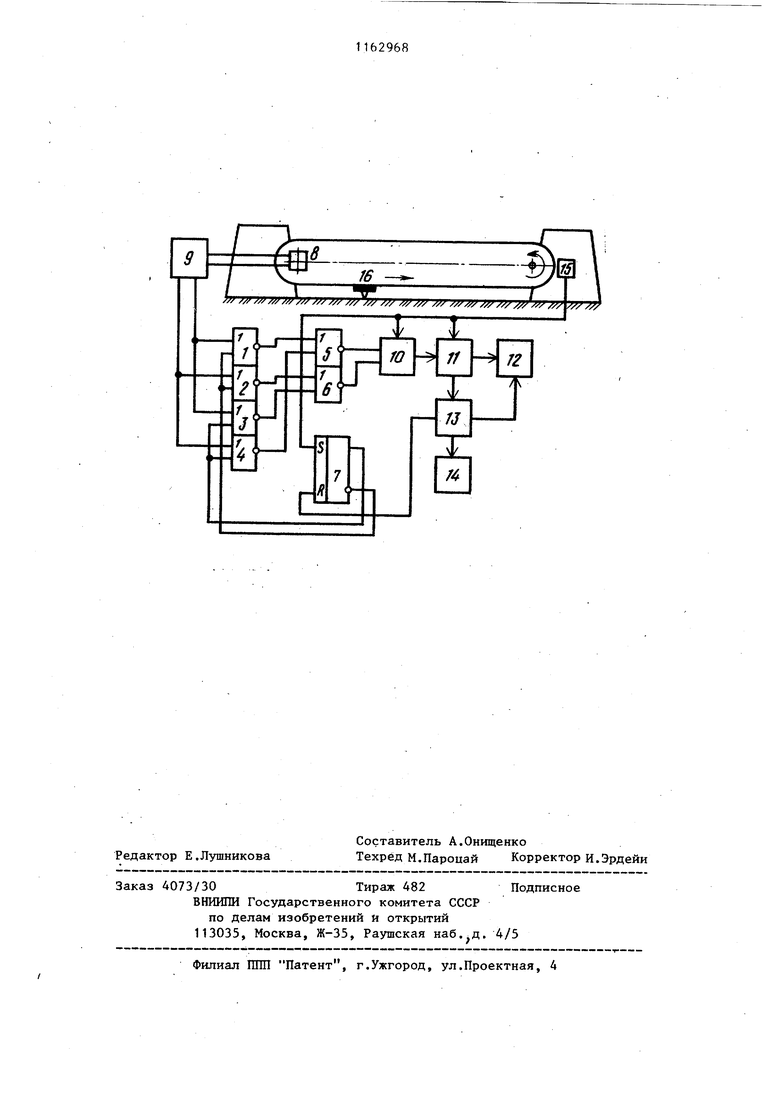
Изобретение относится к горной промьшшенности и может быть использовано для контроля местонахождения движущегося объекта на заданном участке траектории. Цель изобретения - повьшение точ ности указания положения почвенной каретки в лаве. На чертеже приведена схема устройства. Устройство контроля работы агрег та содержит шесть элементов ИЛИНЕ 1-6, RS -триггер 7, преобразователь 8 угол - код, блок 9 кодирования направления движения объекта масштабный преобразователь 10, реверсивный счетчик 11, цифровой инди катор 12, блок 13 задания участков работыJ блок 14 управления, импульс ный датчик 15 положения, установлен ный на почвенной каретке реперный магнит 16. Первые входы первого 1 и третьего 3 элемента ИЖ-НЕ соединены с первым выходом блока 9 кодирования направления движения объекта, первые входы второго 2 и четвертого 4 элементов ИЛИ-НЕ соединены с инверс ным выходом RS -триггера 7, вторые входы третьего 3 и четверто- i го 4 элемен -ов ИЛИ-НЕ соединены с прямым выходом RS -триггера 7, выход первого элемента ШШ-НЕ 1 соеди нен с первым входом пятого элемента РШИ-НЕ 5, выход второго элемента ИЛИ-НЕ 2 соединен с первым входом шестого элемента ИПИ-НЕ 6, выход третьего элемента ИЖ-НЕ 3 соединен с вторым входом пятого элемента ШШ-НЕ 5, выход четвертого элемента ШШ-НЕ 4 соединен с вто рьм входом пятого элемента ИЖНЕ 5, выход импульсного датчика 15 положения соединен с управлякяцими входами масштабного преобразователя 10, реверсивного счетчика 11 и 3-входом RS -триггера 7, а третий выход блока 13 задания участков работы соединен с R -входом RS триггера 7. Устройство работает следующим образом. Цикл работы начинается после про хода почвенной каретки мимо датчика 15 положения. Сигнал с выхода да чика 15 подается на входы ориентиро ки реверсивного счетчика 11, масшта ного преобразователя 10 и S -вход RS-триггера 7; устройство при этом устанавливается в исходное состояние, В исходном состоянии шесть элементов ИЛИ-НЕ 1-6 устанавливаются на передачу сигналов прямого счета, а масштабный преобразователь 10 и реверсивный счетчик 11 в нулевое состояние, при этом индикатор 12 погашен. Преобразователь угол-код 8, выполненнь1Й надвух герконах, замыкающихся при подходе постоянного магнита, укрепленного на вращающейся звездочке привода агрегата, подает сигнал в блок 9 кодирования направления движения объекта, с выхода последнего сигнал подается на первые входы первого, второго, третьего и четвертого элементов ИЛИ-НЕ 14. На вторые входы первого и второго элементов ИЛИ-НЕ подведется с выхода R6 -триггера 7 сигнал логического нуля, а на вторые входы третьего и четвертого элементов ИЛИ-НЕ 3 и 4 - сигнал логической единицы. При этом На- выходах третьего и четвертого логических элементов ИЛИНЕ 3 и 4 устанавливаются уровни логического нуля независимо от сигналов на их первых входах. На выходах первого и второго логических элемен1Ъв ИЛИ-НЕ 1 и 2 будут сигналы инверсные относительно сигналов на их первых входах. На первые входы пятого и щестого логических элементов ИЛИ-НЕ 5 и 6 подаются сигналы с- выходов первого и второго логических элементов РШИ-НЕ 1 и 2, на вторые входы этих элементов подаются сигналы логического нуля. Следовательночкод на выходах пятого и шестого элементов ИЖ-НЕ 5 и 6 повторяет код на выходе блока 9 кодирования направления движения объекта 9, с выходов пятого и шестого логических элементов код прямого счета поступает на вход масштабного преобразователя 10, который преобразует сигналы, поступившие от преобразователя 8 уголкод в удобной форме, т.е. вьщает импульсы, соответствуюЙ1ие величине пути, пройденному кареткой либо в метрах, либо в отрезках, равных шагу крепи. С выхода масштабного преобразователя 10 сигнал поступает на вход реверсивного счетчи3ка 11 . С выхода этого счетчика сигнал поступает на вход блока зада ния участков работы. При этом реверсивный счетчик считает импульсы до числа, заданного блоком 13. После того, как содержимое раверсивного счетчика станет равным числу заданному блоком 13, с его первого выхода вьщается сигнал, который пос тупает на R -вход триггера 7, при этом он изменяет состояние выходов на инверсное. Шесть логических элементов ИЛИ-НЕ 1-6 переключаются таким образом, что на выходах пятого и шестого элементов ИЛИ-НЕ 5 и 6 ко имеет направление обратное коду на выходе блока 9, и соответственно реверсивный счетчик 11 начинает вычитать поступающие на его вход импульсы. Со второго выхода блока 13 сигналы поступают на вход разреше ния цифрового индикатора 12, который начинает индицировать местонахождение каретки выемочного органа, на рабочей ветви его траектории движения. С третьего выхода блока 13 сигналы поступают на блок управления В конце рабочей ветви траектории движения рабочего органа установлен импульсный датчик 15 положения, который служит для исключения накапливания ошибки при случайных сбоях и для ориентировки всего устройства в исходное состояние. При изменении направления движения каретки на противоположное рабо чему ходу, что может произойти при упругих колебаниях тяговой цепи или при реверсе привода во время ремонт ных работ, реверсивный счетчик скла дывает импульсы во время нахождения каретки на рабочей ветви траектории движения при светящемся цифровом .индикаторе и вычитает, если каретка находится на холостой ветви траектории движения при погашенном цифровом индикаторе. Базовый объект содержит импульсный датчик, концевые датчики, стационарные датчики, блок предваритель ной подготовки сигналов импульсного датчика, счетчик, блок синхрониза684ции, корректирующее устройство с кодирующими переключателями, задающими длину лавы, диаметр приводной звездочки и зону струга, контрольное устройство, цифровой индикатор, линейный индикатор, блок задания участков работы, в отличие от предлагаемого устройство, которое содержит только один импульсный датчик положения, вьшолняющий и роль стационарных. Базовый объект содержит два концевых и три стационарных датчика, следовательно, изобретение проще, а если учесть, что надежность систем в значительной степени зависит от надежности датчиков, то и надежность предлагаемого устройства вьшге. В предлагаемом устройстве синхронизация осуществляется подачей импульса от импульсного датчика положения непосредственно на входы синхронизируемых блоков, в то время как в базовом объекте это осуществшяется с помощью специальных блоков синхронизации, корректирующего и контрольного устройств. В предлагаемом устройстве отсутствуют кодирующие переключатели, а соответствующие коэффициенты вводятся в процессе изготовления аппаратуры, что предусмотрено конструкцией блока масштабного преобразователя. В базовом объекте импульсный датчик пути не определяет направления движения, а только вьщает импульсы, пропорциональные отрезку пути,- в предлагаемом устройстве с помощью преобразователя угол-код различается и направление движения. Вазовьй объект, применительно к машинам типа агрегата, вьщает не однозначную информацию, в то время как необходимо однозначно индицировать положение почвенной каретки на нижней ветви траектории. Таким образом предлагаемое устройство дает возможность осуществить однозначн ю индикацию положения почвенной каретки в лаве, исключает- ся накопление ошибок при упругих колебаниях тяговой цепи, при реверсе привода или при случаных сбоях устройства.
/4
нгу-
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания тормозов транспортных средств | 1987 |
|
SU1474506A1 |
| Устройство для определения направления и угла поворота вращающегося объекта | 1991 |
|
SU1786441A1 |
| Устройство формирования и регистрации путевых параметров для управления шахтной подъемной установкой | 1989 |
|
SU1835383A1 |
| Система измерения температуры | 1985 |
|
SU1247835A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Устройство для кодирования звуковых сигналов с инерционным компандированием | 1985 |
|
SU1356233A1 |
| Устройство для контроля средств числового программного управления | 1988 |
|
SU1675852A1 |
| Устройство для автоматического управления объектом | 1982 |
|
SU1084741A1 |
| ЦИФРОВОЕ РЕЛЕ ЧАСТОТЫ ВРАЩЕНИЯ С ФУНКЦИЕЙ РЕКОНСТРУКТИВНОЙ ДИАГНОСТИКИ | 2016 |
|
RU2618495C1 |
| Цифровой измеритель магнитной индукции | 1988 |
|
SU1629886A1 |
УСТРОЙСТВО ИНЛИКА1ЩИ РАБОТЫ АГРЕГАТА, включающее преобразователь угол-код, блок кодирования направления движения объекта, цифровой индикатор и последовательно соединенные масштабный преобразователь, реверсивный счетчик, блок задания участков работы и блок управления, в котором входы цифрового индикатора соединены с вторыми выходами реверсивного счетчика и блока задания участков работы, о тличающееся тем, что, с целью повьшения точности указания положения почвенной каретки в лаве, оно снабжено шестью элементами ИПИ-НЕ, R3 -триггером, реперным магнитом, установленным нз -почвенной каретке, и импульсным датчиком положения, установленным на осевой плоскости режущего органа агрегата на одинаковом с реперным магнитом расстоянии от ocfi приводной головки, причем первые входы первого и третьего злементов ИЛИ-НЕ соединены с первым В1лсо- дом блока кодирования направления движения объекта, первые входы второго и четвертого элементов ИЛИ- НЕ соединены с вторым выходом блока кодирования направления движения объекта, вторые входы первого и второго злементов ИПИ-НЕ соединены с инверсным выходом R5 -тригге(Л ра, вторые входы третьего и четвертого элементов ИЛИ-НЕ соединены с прямым выходом 
| Устройство контроля движения горной машины | 1978 |
|
SU748002A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Голубчиков A.M., Кибрик И.О., Торубалко Т.Г., Шапошник В.И | |||
| Аппаратура автоматизации струговых установок | |||
| М., ЦНИЭИуголь, 1981,с | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
