Изобретение относится к балансировочной технике и может быть исполь зовано на станках для балансировки роторов асинхронных электродвигателей, имеющих нечетное число зон разрешенной коррекции в каждой плоскости коррекции и допускающих коррекцию с помощью установки дополнительных грузов.
Целью изобретения является повышение точности балансировки роторов асинхронных электродвигателей, допускающих корректировку дисбаланса с помощью установки дополнительных грузов в нечетном числе зоны коррекции в каждой из двух плоскостей коррекции.
На чертеже изображена структурная схема станка для балансировки роторов асинхронных электродвигателей для реализации предлагаемого способа Станок содержит опоры дпя установки ротора, привод (не показан) и измерительное устройство.
Для настройки станка изготавливается эталонный ротор 1, имеющий нечетное количество штырей 2 и лопаток 3. В штырях 2 просверлены отверстия с резьбой для постановки контрольных грузов 4, каждый из которых тарирован по массе (все грузы 4 должны быть одинаковы).
Все отверстия дпя закрепления грузов 4 в штырях 2 выполнены на одном и том же радиусе от оси вала ротора 1. Измерительное устройство станка для балансировки роторов электродвигателей, который настраивается по
единенных датчика 28(29) лопаток, второго логического элемента 2И 30(31), десятичного счетчика 32(33),
цифрового индикатора 34(35) и пятиразрядного кольцевого регистра-36(37), первый вход которого соединен с выходом формирователя 16(17), второй вход - с выходом датчика 28(29) лопаток, первый выход - с вторым входом первого синхронного детектора 18(20), второй вход - с R-входом триггера 26(27) и вторым входом второго синхронного детектора 19(20),
а выход триггера. 26(2.7) связан с вторым входом второго логического элемента 2И 30(31), входы первого логического элемента 2И 7 связаны с выходами блока 5 управления и датчика 6 шпонки а выход - с S-входом триггеров 26 и 27 и вторыми входами десятичных счетчиков 32 и 33 в обоих измерительных каналах.
Точками N,, М и Р обозначено расположение соответственно датчика и шпонки и датчиков 28 и 29 лопаток относительйо ротора 1 при измерении, дисбаланса, а пунктирными линиями, проходящими через эти точки, - траектории возможных перемещений указанных датчиков в процессе настройки станка. .
Способ настройки станка для .балансировки роторов электродвигателей осуществляют следующим образом.
На опоры станка устанавливается эталонный ротор 1 асинхронного электродвигателя, дисбаланс которого минимальный (на порядок меньше до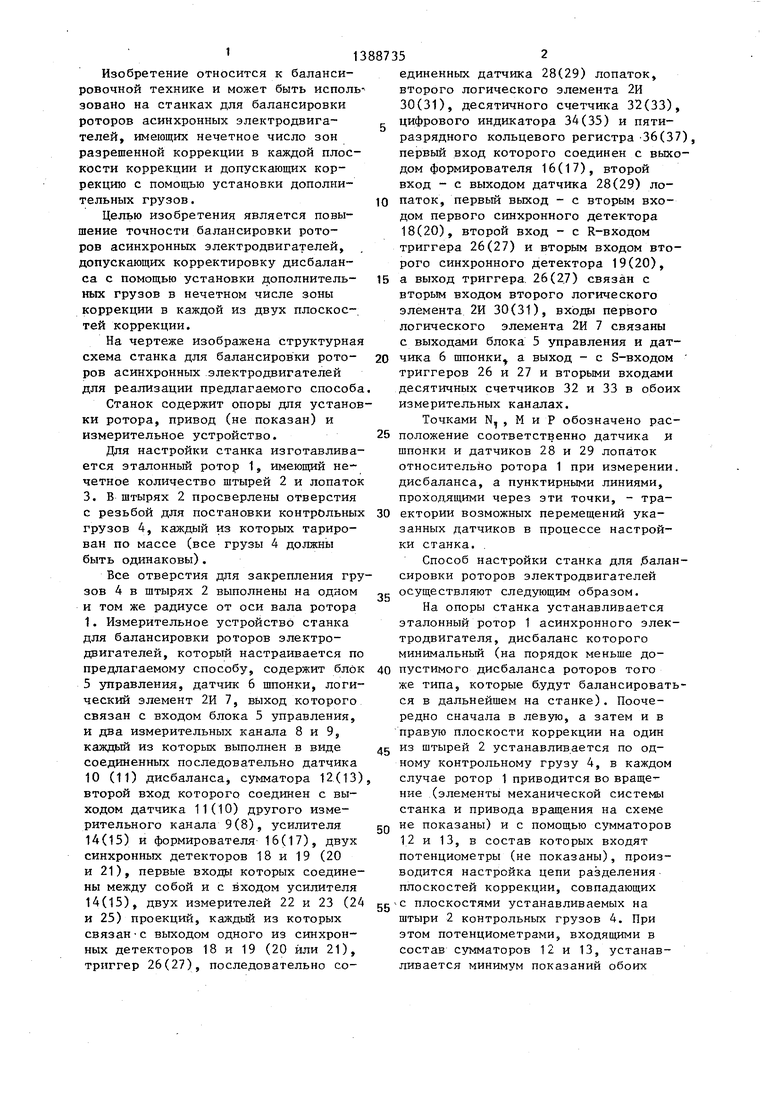
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1182297A2 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1196709A1 |
| Способ настройки станка для балансировки коленчатых валов | 1983 |
|
SU1163169A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Способ настройки станка для балансировки колесных пар | 1981 |
|
SU1004787A1 |
| Автоматическая балансировочная линия | 1985 |
|
SU1272134A1 |
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1096510A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1229620A2 |
| Измерительное устройство станка для балансировки коленчатых валов | 1990 |
|
SU1714401A1 |
Изобретение относится к бгшан- сировочной технике и может быть использовано на станках для балансировки роторов асинхронных электродвигателей, допускающих корректировку дисбаланса с помощью установки дополнительных грузов в нечетном числе разрешенных зон коррекции, в каждой из Двух плоскостей коррекции. Цель изобретения - повьшение точности балансировки за счет настройки станка, осуществляемой созданием легкого места в определенных зонах каждой плоскости коррекции. Для этого после разделения плоскостей коррекции во все зоны разрешенной коррекции устанавливают по одному одинаковому грузу, снимают один из грузов, создавая в этой зоне легкое место, устанавливают на индикаторах станка номер; зоны с введенным дисбалансом. Эти операции проводят и во второй плоскости коррекции. Снимают груз в соседней зоне, создавая с помощью двух снятых грузов дисбаланс, дающий возможность установить единицы коррекции в каждой зоне. 1 ил. i (О со 00 00 00 ел
предлагаемому способу, содержит блок 40 пустимого дисбаланса роторов того
5 управления, датчик 6 шпонки, логический элемент 2И 7, выход которого связан с входом блока 5 управления, и два измерительных канала 8 и 9, каждый из которых выполнен в виде соединенных последовательно датчика 10 (11) дисбаланса, сумматора 12(13) второй вход которого соединен с выходом датчика 11(10) другого измерительного канала 9(8), усилителя 14(15) и формирователя 16(17), двух синхронных детекторов 18 и 19 (20 и 21), первые входы которых соединены между собой и с входом усилителя 14(15), двух измерителей 22 и 23 (24 и 25) проекций, каждый из которых связан-с выходом одного из синхронных детекторов 18 и 19 (20 или 21), триггер 26(27), последовательно соже типа, которые будут балансироваться в дальнейшем на станке). Поочередно сначала в левую, а затем и в правую плоскости коррекции на один g из штырей 2 устанавливается по одному контрольному грузу 4, в каждом случае ротор 1 приводится во вращение (элементы механической системы станка и привода вращения на схеме не показаны) и с помощью сумматоров 12 и 13, в состав которых входят потенциометры (не показаны), производится настройка цепи разделения плоскостей коррекции, совпадающих с плоскостями устанавливаемых на штыри 2 контрольных грузов 4. При этом потенциометрами, входящими в состав сумматоров 12 и 13, устанавливается минимум показаний обоих
0
5
индикаторов проекций в плоскости, .противоположной поставленному контрольному грузу 4. После окончания настройки схемы разделения плоскостей коррекции на эталонный ротор 1 в обе плоскости коррекции н каждый из штырей 2 устанавливается по одному контрольному грузу 4 (все контрольные грузы одинаковы) и проверяется дисбаланс эталонного ротора 1 с установленными контрольными грузами 4. В случае необходимости эталонный ротор 1 должен быть отбалансирован до установленной величины с помощью, например, пластилина. Затем снимают один из контрольных грузов 4 в правой плоскости коррекции, отсчитывают от шпоночного паза на валу ротора против направления вращения порядковый номер снятого контрольного груза, и вклю.чаю вращение ротора 1 .Так как датчик 29(28 lionaTOK заранее невозможно выставить, то показания индикаторов 24 и 25 проекций в правой плоскости кор- рекции не будут соответствовать дисбалансу от снятого контрольного груза. Любой дисбаланс в плоскости коррекции раскладывается на две проекции. Если контрольный груз 4 снят только с одного штыря, то один из индикаторов проекций, например 25,. должен показать нуль, а показания второго, например 24, должны соответствовать дисбалансу от снятого контрольного груза 4. Установка датчика 29(28) лопаток на опоре станка позволяет перемещать его по радиусу вокруг оси вращения балансируемого ротора. Для этой цели может быть использован паз с постоянным радиусом, в котором может перемещаться и в любом месте паза фиксироваться арматура, на которой установлен датчик 29(28) лопаток. Для правильной установки датчика 29(28) лопаток достаточно иметь возможность перемещать его в пазу ±20°. Конструктивные элементы закрепления датчика 29(28) лопаток на схеме не проведены, так как эти решения при реализации не вызывают затруднений. Итак, расфиксировав датчик 29 лопаток в пазу, медленно его перемещают, добиваясь нуля на индикаторе 25 проекций при положительных показаниях на индикаторе 24 проекций, и фиксируют датчик 29 лопаток в найденном
10
J5
20
25
30
35
40
45
0
5
положении. Далее расфиксируют датчик, 6 шпонки, который конструктивно закрепляется на опоре станка аналогично датчикам 28 и 29 лопаток, и, медленно перемещая его в пазу, следят, чтобы на цифровом индикаторе 34(35) бьша цифра, соответствующая номеру штыря со снятым грузом, отсчитыва- : емому от шпоночного паза против вращения ротора 1. На этом установка датчика 29 лопаток и датчика 6 шпонки заканчивается, вращение ротора 1 выключается, и контрольный груз 4 устанавливается на прежнее место. Для того чтобы пояснить разницу в на.ст- ройке описьшаемого станка от других типов станков, предположим, что на тот же штырь можно установить еще один (помимо уже установленного там). контрольный груз 4, или, что то же самое, снять все контрольные грузы с правой плоскости коррекции и установить один груз на этот штырь. Так как станок настроен на легкое место, т.е. на постановку корректирующих грузов в те места, которые покажет измерительный пульт, то легкое место от поставленного гру- ,за будет расположено между штырями, расположенными напротив по диаметру (количество штырей на роторе нечетное, поэтому противоположного штыря нет, ось Пройдет между двумя штырями). В этом случае при измерении дисбаланса от одного поставленного груза показания будут на двух индикаторах проекций правой плоскости (показания примерно равные на обоих индикаторах), что подтверждает невозможность настройки станка для балансировки роторов асинхронных электродвигателей с нечетным количеством штырей на .балансирующем роторе на тяжелое место, т.е. не снятием контрольных грузов с эталонного ротора, а постановкой (обратив мость настройки на легкое или тяжелое место на таких станках отсутствует) . Далее приступают к настройке датчика 28 лопаток в левой плоскости коррекции. Снимают одинг из контрольных грузов 4 в-левой плоскости коррекции, отсчитьшают от шпоночного паза.38 против направления вращения порядковый номер снятого контрольного груза и включают вращение ротора 1. Аналогично описанному вьше расфиксируют датчик 28
лопаток и, перемещая его вокруг оси вращения ротора (в пазу), устанавливают на одном из индикаторов в левой плоскости минимум показаний, на втором - положительное значение, а на цифровом индикаторе 34 - число соответствующее номе4 у снятого контрольного груза 4, фиксируют датчик 28 лопаток в найденном положении, выключают вращение ротора и устанавливают на прежнее место снятый ранее контрольный груз 4, После настройки датчиков 28 и 29 лопаток при снятии любого из уст.ановленных на роторе контрольных грузов в правой плоскости коррекции показания индикатора 24 проекций будут соответствовать дисбалансу от снятого контрольного груза, а показания индикатора 25 проекций будут равны нулю. Аналогичная картина будет и в левой плоскости коррекции при снятии любого из контрольных грузов - показания, соответствующие дисбалансу от снятого контрольного груза будут все время на одном и том же индикаторе проекций, а на, втором - все время нули, т;е. при снятии любого из контрольных грузов уста но- вить единицу коррекции можно будет только одного из индикаторов проекций. Поэтому для установления единицы коррекции в левой (или правой) плоскости коррекции требуется снять два любых рядом расположенной контрольных груза, включить вращение ротора и установить с помощью потенциометров, входящих в состав измерителей 22 и 23 .(24 и 25) проекций, на каждом из стрелочных приборов, также входящих в состав изме
рителей проекций, соответствующее дисбалансу от одного снятого контрольного груза количество делений.
На этом настройка станка для балансировки роторов асинхронных электродвигателей заканчивается и можно приступить к балансировке роторов, аналогичных nd конструкции эталонному.
сФормула изобретения
Способ настройки балансировочного станка, заключающийся в том, что на станок устанавливают эталонный ротор, приводят его во вращение,
0 производят разделение плоскостей коррекции и задают известный дисбаланс, отличающийся тем, что, с целью повьшения точности балансировки роторов асинхронных электро5 двигателей с нечетным числом лопастей, корректирование дисбаланса которых осуществляется установкой допол - нительных грузов, во все зоны разрешенной коррекции каждой из плоскостей
0 коррекции устанавливают по одному одинаковому грузу, задают известный дисбаланс снимая один из грузов в определенной зоне каждой плоскости коррекции, вращают зотор, устанавливают на индикаторах станка номер зоны с введенным дисбалансом, снимают груз в соседней зоне и по дополнительным индикаторам устанавливают единицы коррекции.
| Способ настройки балансировочного станка | 1975 |
|
SU530212A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ настройки автоматической линии для балансировки коленчатых валов | 1983 |
|
SU1185141A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
