о
4
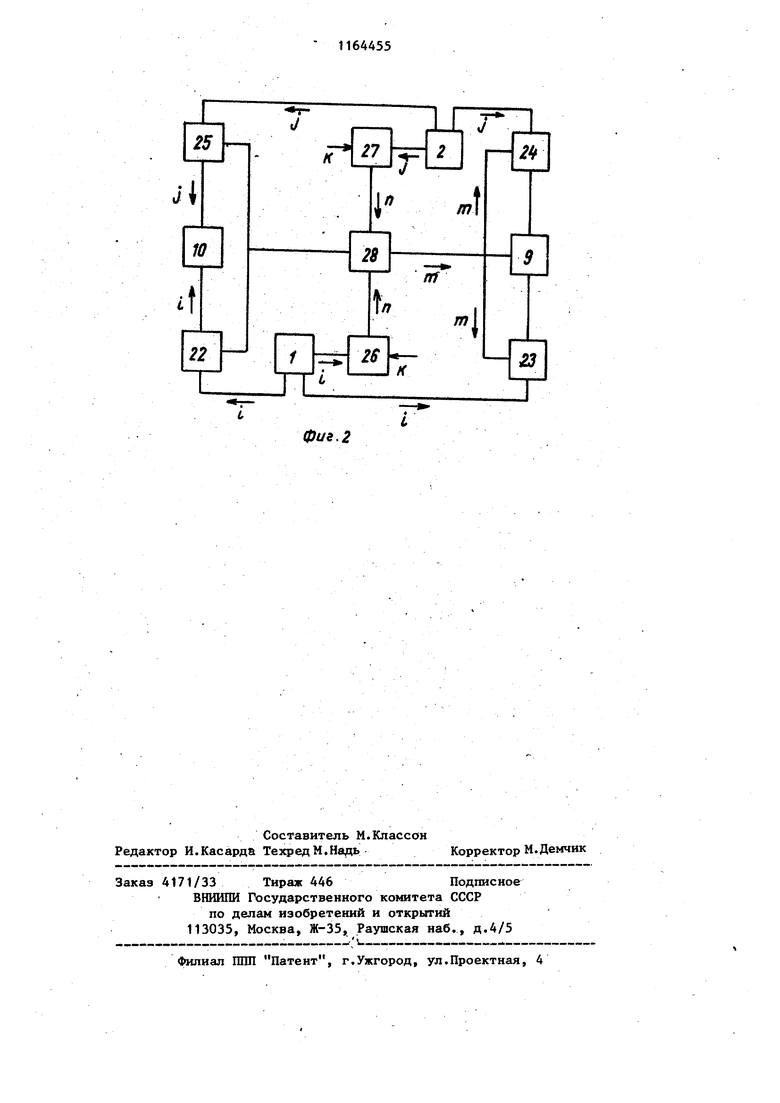
ел ел Изобретение относится к гидромаши ностроению и может быть использовано в гидромашинах с индивидуальными при водами лопаток направляющего аппарата. Известен способ управления лопатк ми направляющего аппарата гидромашин с индивидуальными приводами путем синхронизации их поворота на одинако вый угол СО. Однако в известном способе управления при заклинивании и рассинхрони зации поворота одной из лопаток в случае, например, попадания посторон них предметов на рабочем колесе гидРомашины возникает значите 1ьное радиальное усилие, воспринимаемое направляющим подшипником, что ведет к снижению надежности работы гидромашины. Цель изобретения - ьовышение надежности работы гидромашины при заклинивании и рассинхронизации поворота одной из лопаток. Указанная цель достигается тем, что согласно способу управления лопатками направляющего аппарата гидро машины с индивидуальными приводами путем синхронного их поворота на оди наковьй угол, лопатку, располояоэнную диаметрально противоположно заклинив шейся, устанавливают в положение, со ответствующее положению последней, а после устранения причины заклинивания синхронизируют поворот всех лопаток направляющего аппарата. На фиг.1 изображена гидромеханическая схема устройства управления двумя расположенными диаметрально противоположно лопатками направляющего аппарата, на фиг.2 - его электрическая блок-схема. Устройство содержит датчики 1 и 2 положения двух расположенных диаметрально противоположно лопаток 3 и 4 соответственно, индивидуальные приводы в виде сервомоторов 5 и 6 со штоками 7 и 8 соответственно, электрогидравлические преобразователи 9 и 10 с регулирующими штоками 11 и 12 соответственно, побудительные золотники 13 и 14, золотники 15 и 16 управления, рычаги 17 и 18, рычажрые передачи 19 и 20, соединенные с синх ронизирующей передачей 21, электромагнитные реле 22 и 23, 24 и 25, датчики 26 и 27 сравнения сигналов. электромагнитное реле-распределитель 28 сигналов. Способ осуществляется следующим образом. При аклинивании и рассинхрон 1зации поворота одной из лопаток направляющего аппарата гидромашины, например лопатки 3, датчик 1 положения вырабатывает сигнал i, который поступает через электромагнитное реле 22 в злектрогидравлический преобразователь 10. Последний, отрабатывая сигнал i, смещает регулирующий шток 12, который, взаимодействуя с рычагом 18, через побудительньй золотник 14 и золотник 16 управления смещает шток 8 сервомотора 6 и лопатку 4. При этом датчик 2 положения вырабатывает сигнал обратной связи j положения лопатки 4, который через электромагнитное реле 25 поступает в злектрогидравлический преобразователь 10. Когда сигнал обратной связи j становится равньм сигналу i, действие электрогидравлического преобразователя 10 прекращается, что соответствует установке лопатки 4 в положение, соответствукщее положению заклинившейся лопатки 3. Остальные лопатки направляющего аппарата (на фиг.1 не показаны), приводимые в движение синхронизирующей передачей 21, поворачиваются синхронно на одинаковый угол независимо от рассогласованных с ними лоцаток 3 и 4. После устранения Причины заклинивания синхронизируют поворот всех лопаток направлякнцего аппарата, для чего исключают из работы электрогидравлический преобразователь 9 следующим образом. С датчика положения (на фиг.2 не показан) лопатки соседней с лопаткой 1 подают сигнал К на датчик 26 сравнения сигналов. Этот сигнал сравнивается с сигналом i, поступающим с датчика 1 положения лопатки 3. При неравенстве сигналов i и К с датчика 26 сравнения сигналов на электромагнитное реле-распределитель 28 сигналов поступает сигнал га. Контакты электромагнитного реле-распределителя 28 сигналов замыкают электрическую цепь, соединякяцую датчик 27 сравнения сигналов и электромагнитные реле 22 и 23, не пропуская сигнал п, образованный в датчике 27 сравнения сигналов. Сигнал т, поступая на электромагнитные реле 23 и 24, размыкает, их контакты, которые тем самым размыкают электрическую цепь прохолздения сигналов i и j на электрогидравлический преобразователь 9.
Контакты реле-распределителя 28 сигналов находятся в указанном положении до тех пор, пока датчик 1 положения не вьщает. сигнал i, равный сигналу К, что соответствует согласованному положению лопатки 3 с соседней лопаткой и, следовательно, с другими лопатками.
Согласование положения лопатки 3 и последующий ее синхронньш поворот с остальными лопатками производят посредством синхронизирующей передаче 21, рычажной передачи 19, рычага 17, побудительного рычага 13, управляющего золотника 15 и сервомотора 5. Сигнал i, вьфабатываемый датчиком. 1 положения, поступает в систему управления лопаткой 4, обеспечивая согласование ее положения через электрогидравлический преобразователь 10.
В результате все лопатки направляющего аппарата при его открытии или закрытии поворачиваются синхронно посредством синхронизирующей передачи 21.
Использование предлагаемого изобретения позволяет значительно уменьшить нагрузку на направлякмций подшипник гидромашины при заклинивании и рассинхронизации поворота одной из лопаток направляющего аппарата и темсамым повысить надежность работы гидромашины.

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКОГО ПРИВОДА РЕГУЛИРУЮЩЕГО ОРГАНА | 2008 |
|
RU2366820C1 |
| Способ управления сервомотором рабочего колеса поворотно-лопастной турбины | 2014 |
|
RU2614232C2 |
| Регулятор скорости поворотно-лопастной гидротурбины | 1974 |
|
SU931942A1 |
| НАСОС-ТУРБИНА | 1972 |
|
SU352035A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ ГИДРОТУРБИНЫ | 1969 |
|
SU258164A1 |
| Система регулирования поворотно-лопастной гидротурбины | 1982 |
|
SU1025911A1 |
| Автоматический регулятор скорости гидротурбины | 1975 |
|
SU969946A1 |
| ГИДРОТУРБИНА | 2005 |
|
RU2306452C2 |
| Система автоматического регулирования расхода воздуха транспортной котельной установки | 1973 |
|
SU501013A1 |
| ОСЕВОЙ КОМПРЕССОР ТУРБОМАШИНЫ | 2004 |
|
RU2267656C2 |
СПОСОБ УПРАВЛЕНИЯ ЛОПАТКАМИ НАПРАВЛЯЩЕГО АППАРАТА ГВДРОМАШИНЫ с индивидуальными приводами путем синхронного их поворота на одинаковый угол, отличающийся тем, что, с целью повышения надежности работы гидромашины при заклинивании и рассинхронизахщи поворота одной из лопаток, лопатку, расположенную диаметрально противоположно заклинившейся, устанавливают в положение, соответствующее положению последней, а после устранения причины заклинива1шя синхронизируют поворот всех лопа:ток направлякнцего аппарата.
ti
0U9,2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Клявин Л.А., Шелопугин В.Н | |||
| Система управления нйправлякщим аппаратом с индивидуальными сервомоторами | |||
| Научные исследования для СаяноШушенской ГЭС | |||
| Л., Энергия, 1978, с | |||
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
