Изобретение относится к технике из- мерения скорости текучих сред и может быть использовано для измерения параметров вертикального распределения горизонтальной скорости течения в океане. Известен измерительный комплекс дл пол чения данных о расггределениях скорости течений в океане . В этом измерителе используются аку тические или электромагнитные измерители скорости течения с применением нескольких измерительных баз. Недостатком.при изморе их вертикаль ного распределения скорости океанических течений является невысокая точност из-за отсутствия измерительного канала глубины и контроля положения измерителя в потоке. Известен также измерительный зондирующий комплекс для получения данны о вертикальных распределениях горизонтальной скорости течения в океане, например двухкоординатный измеритель скорости воды 2. В этих приборах используется вращение чувствительных элементов вокруг своей продольной оси для модуляции сигналов геомагнитным полем или полем,те чения и последующее выделение компонент вектора скорости. При этом не устраняется влияние сноса прибора течениями имеет место силън&я зависимость чувствительности измерителей от географической игироты или величины скорости. . Сами по себе приборы сложны и обладают низкой надежностью. Наиболее близким по технической сущности является зондируюший комплекс профиля скоростей течения, содержащий корпус, измеритель гидростатического давления, выход которого соединен с выходом коммутатора каналов, два акустических измерителя скорости течения, измерительные базы ориент1фо- ваны перпендикулярно продольной оси корпуса, а их парные выходы соединены соответственно со входаг.те коммутатора каналов, измеритель угла азимута, под379
клгоченный к входу коммутатора, выход которого через, преобразователь уголвременной интервал соединен с входом коммутатора каналов, два выхода которого подключены к первым входам двух счетчиков, ко вторым вентильным входам Которых подключен генератор опорной частоты, а выходы счетчиков через преобразователь 7сода и модулятор связи соединены кабельтросовой линией с бортовой аппаратурой, выход которой через приемник-делмодулятор подключен к входу магнитного регистратора и к выходу коммутатора бортовых измерителей, причем один из его входов соединен с блокам ттравления, подключенным к выходу приемника-демодулятора, а другой вход коммутатора бортовых измерителей соединен свыходом измерителя изменения координат судна по данной ра
р -1 дйонавигационной системы 3J.
Недостатком измерительного комплексса является его невысокая точность изза погрешностей, вызванных отклонением продольной оси зонда от вертикали под действием течений и сносом зонда от борта судна при погружении.
иелью изобретения является повышение ТОЧНОСТИ измерения.
Посгавлзнная цель достигается тем, что в зондтфпошйй комплекс профи ш ско .ростей течения дополнительно введены два измерителя ;гглов отклонения продольной оси корпуса от вертикали, третий акустический измеритель скорости течения, база которого ориентирована по продольной оси корпуса, измеритель 7 ;урса судна, измеритель- интервалов времени, измеритель длины сматываемого кабель-троса, измеритель угла отклонения кабель-троса от поперечной плоскоети судна, причем измерители углов отклонения продольно, оси зонда от вертикали через коммутатор, и преобразователь угол-временной интервал и парные выходы третьего акустического измерителя скорости подключены ко входам коммутатора каналов, а выходы измерителя курса судна, измерителя интервалов времени, измерителя длины сматываемого кабель-троса, измерителя угл отклонения кабель-троса от поперечной плоскости судна соединены с входами коммутатора бортовых измерителей, выхо которого соединен с магнитным регистра тором.
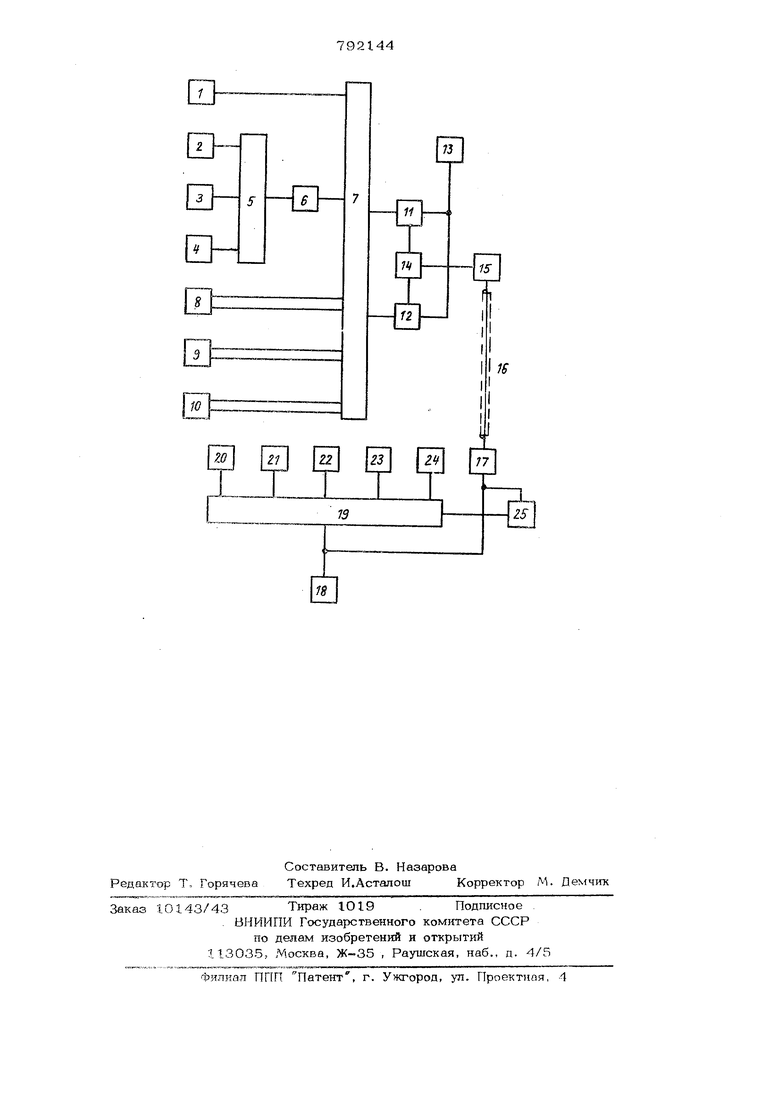
На чертеже изображена схема предлагаемого комплекса.
44
Он содержит измеритель I гидростатического давления, выходным параметром которого является временной интервал, пропорциональный периоду импульсов первичного преобразователя давления, гидроскопический измеритель 2 угла азимута и измерители 3 и 4 углов отклонения продольной оси зонда от вертикали. Выходы измерителей 2 3 и 4 соединены со входами коммутатора 5, выход которого через преобразователь 6 уголвременной интервал совместно с выходом измерителя I гидростатического давления подключен к первому и второму входам
коммутатора 7 каналов соответственно. Третий и четвертый, пятый и шестой, седьмой и восьмой входы коммутатора 7 каналов соединены соответственно с парными выходами трех взаимно перпендику-
лярных акустических измерителей 8-1О скорости течения, причем измеритепьные базы акустических измерителей 8 и 9 ориентированы вдоль взаимно перпендикулярных поперечных осей корпуса, а измерительная база акустического измерителя 10 - по продольной оси корпуса. Первый и второй выходы коммутатора 7 каналов соединены соответственно с пёр- выми входами . вентилей счетчиков 11 и
12, вторые входы Которых подключены к генератору 1.3 опорной частоты, а выходы счетчиков соединены с входами преобразователя 14 параллельного кода в последовательный, выход которого через модулятор 15 связи подключен к входу кабельтросовой линии связи между погружной и бортовой аппаратурой t6. Выход кабельтросовой линии .связи через приемник-демодулятор 17 соединен с
входом магнитного регистратора 18. К этому же входу подключен выход коммутатора 10 бортовых измерителей, к первому- пятому входам которого подключены соответственно выходы бортовых измерителей: курса судна 2О, изменения координат судна по данным радионавигационной системы 21, интервалов времени 22, длины сматываемого кабель-троса 23 и угла отклонения кабель-троса от поперечной плоскости судна 24. В состав зондирующего комплекса входит также блок 25 управления, вход которого соединен с выходом Приемника-демодулятора 17. а выход подключен к шестому
входу коммутатора 19 бортовых измерений. Работа зондирующего комплекса профиля скорости течения осуществляется следуюшим образом.
При погрун ении его на выходе измерителя I гидростатического дагмтения формируются временные интервалы, пропорциональные периоду импульсов первичного преобразователя давления (глубины погружения), сигнал на выходе измерителя 2 угла азимута пропорционален отклонению измерительной базы, акустического измерителя S скорости от плоскости магнитного меридиана. Сигналы на выходах измерителей 3 и 4 углов отклонения продольной оси корпуса от вертикали пропорциональны отклонению продольной оси корпуса -зонда от вертикали в плоскостях, совпадающих с измеригельньгми базами акустических измерителей 8и 9 соответсгвенно. Коммутатор 5 последовательно подключает выходы измерителей 2-4 к преобразователю 6, на выходе которого формируютс разнесенные интервалы времени, пропорциональные перечисленным выше измеряемым величинам.. Одновременно с парных выходов акустических измерителей 8-10 скорости течения снимаются временные интервалы, соответствующие составляющим вектора скорости течения вдоль продольной и двух поперечных осей корпуса. Коммутатор 7 каналов последовательно подключает выходы измерителей 1-4 и к входам счетчиков . I к 12. При этом в течение сформированных на выходах коммутатора 7 т аналов временных интервалов на входы счетчиков поступают импульсы генератора 13 опорной частоты и в счетчиках записывают ся в виде двоичного кода числа, пропорциональные всем перечисленным выше из- меряемьпу( вйл гаинам. Эти числа преобразуются в последовательный двоичный код преобразователем 14 и через модулятор 15 канала связи поступают в кабельтросовую линию связи с бортовой аппаратурой 16. Сигналы на выходе кабель-троса формируются приемнт ом-демодулятором 1 и в виде слов, г последовательном двоичном коде подаются Fia магнитный регистратор 18. Одповромсчнно на выходе бортовых изк1ерителей в виде слов в последовательнок-( двоичном коде формируются числа, пропорциональные соответственно курсовому углу судна, изменению координат судна врок{онньгм интервалам, длине сматываемого кабель-троса, углу отклонения кабель-троса от поперечной плоскости судна. Паула между словаз и в двоичном копе, поступающем по кабельтросовой линии связи, выделяется блоком 25 управления, причем во время этой паузы формирзтотся 1тмпульсы упраВ ления комментатором бортовых измерителей 19, подключающим указанные выше измерительные каналы к входу магнитного регистратора таким образом, чтобы во ьремя паузы на мапштной ленте производилась запись информации измерителей 2О-24.
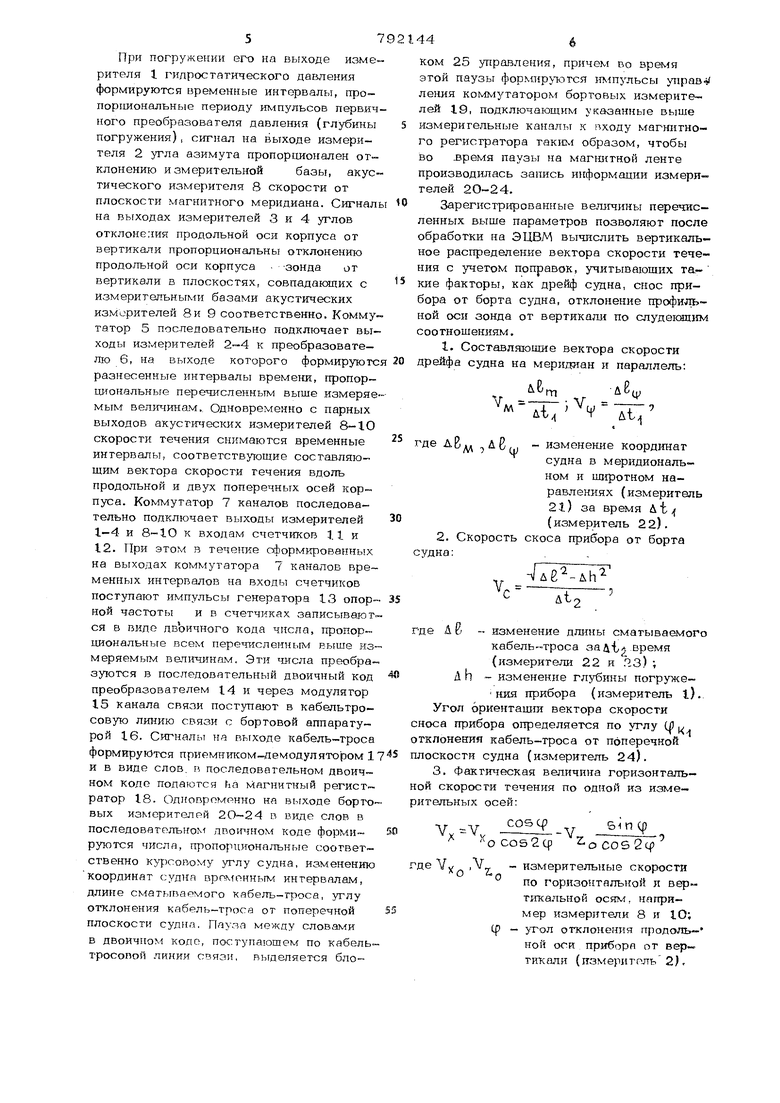
Зарегистрированные вешгчины перечисленных выше параметров позволяют после обработки на ЭЦВМ вычислить вертикальное распределение вектора скорости течения с учетом поправок, учитывающих такие факторы, как дрейф судна, снос прибора от борта судна, отклонение профильной оси зонда от вертикали по слудекнцим соотношениям.
1. Составляющие вектора скорости дрейфа судна на меридиан и параллель:
(V
м
iv,
д-Ь.
ut
1
- изменение коорд1™ат судна в меридиональном и широтном наравлениях (измеритель 21) за время Д t (измеритель 22). скоса прибора от борта
5
ut.
де
- изменение длины сматываемо
где кабель-троса зад-Ьл.время (измерители 22 и .) ;
дН
-изменение глубины погруже-
кия прибора (измеритель l) Угол ориенташот вектора скорости
сноса прибора определяется по углу ( отклонения кабель-троса от поперечной плоскости судна (измеритель 24).
3, Фактическая величина горизонтальной скорости течения по одной из измерительных осей:
совср
-V
V.-V, о COS 2q)
-о cos2cp
,V - измерительные скорости ° по горизонтальной л верт шальпой , например измерители 8 и 10; ф - угол отклонения продоль- ной оси прибора от вертикали (измеритель 2), Анализ погреигпосли ii-.iMpfx.snui вертикального распре;/ о.1Ц: П1//: С (;,.. течения с четом norpour ot. ги нумерения все перечисленных пораметрог ггогспзал, что предлагаемый комплекс может обеспечить измерение с абсолюгио погрешностью порядка 1-3 см/с. Использоваш1е .зопд1фующего комплекса позволяет существенно повысить точность измерения вертикального распределения скорости течешет в океане. Это достигается за счет измерения отклонени продольной оси прибора от вертикальной Составляющей скорости потока по продольной оси, длины сматываемого ка- бел: -троса и угла его отклонения от поперечной плоскости судна интервалу .вре мени, что позволяет-Получить иоправки и учесть та1ше дестабилизирующие факторы, как скорость сноса прибора и отклонение поперечных измерительных осей от горизонтали при наклонах прибора. Формула изобретения Зондирующий комплекс профиля скоростей течения, содержащий корпус, измеритель гидростатического давления., выход которого соединен с входом коммутатора каналов, два акустических измерителя скорости течения, измери тельные базы которых ориентированы перпендикулярно продольной оси корпуса, а парные выходы соед1шек ы Соответственно со входами коммутатора каналов измеритель угла азимута, подключенный к входу коммутатора, выход которого через преобразователь угол временной интервал соединен со входом коммутатора каналов, два выхода ко торого подключены к первым входам дву счетчиков, ко вторым вентильным входам которых подключен генератор опорной частоты, а выходы счетчиков через преобразователь кода и модулятор связи соединены кабельтросовой линией с бортовой аппаратурой, выход которой через приемник-демодулятор подключен к входу магнитного регистратора и к выходу коммутатора бортовых измерителей, причем один из его входов соединен с блоком управления, подключенным к выходу приемника-демодулятора, а другой вход коммутатора бортовых измерителей соединен с выходом измерителя изменения координат судна по данным радионавигационной системы, о т л и ч а ющ и и с я тем, что, с целью повышения точности измерения, в него дополнительно введены два измерителя углов отклонения продольной оси корпуса от вертикали, третий акустический измеритель, база которого ориентирована по продольной оси корпуса. Измеритель курса судна, измеритель интервалов времени, измеритель длины сматываемого кабель-троса, измеритель угла отклонения кабель-троса: от поперечной плоскости судна, причем измерители углов отклонения продольной оси корпуса от вертикали через коммутатор, и преобразователь угол-временной интервал и парные выходы третьего акустического измерителя скорости подключены ко входу коммутатора каналов, а выходы измерителей курса судна, интервалов времени, длины сматываемого кабельтроса,угла отклонения кабель-троса от поперечной плоскости судна соединены с входами коммутатора бортовых измерителей, выход которого соединен с магнитным регистратором. Источншси информации, принятые во внимание при экспертизе 1.Патент Франции .К 2271578, кл. Gr 01 Р 5/ОО, 1976. 2.Патент Японии № 52-5518О, кл. -1-11 А- 1 , 1977. 3.Шевцов В. П. и др. О методике исследования вертикальной структуры морских течений с борта судна. Океанология, т. ХН| , вып. 6, 1973, С.11О81ИЗ (пртотип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Зондирующий комплекс профиля скоростей течения | 1982 |
|
SU1070484A1 |
| Устройство для измерения и регистрации скорости и направления течений | 1983 |
|
SU1164605A1 |
| Устройство для измерения скорости течения | 1982 |
|
SU1136081A1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ТЕЧЕНИЯ | 1991 |
|
RU2050547C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Измерительный зонд скорости течения | 1988 |
|
SU1672379A1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2014 |
|
RU2585500C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2012 |
|
RU2513343C2 |