вых элемента, логический элемент И-НЕ с двумя входами и блок суммирования частот, выход которого соединен с входом генератора опорных синусоидальных колебаний, первый вход - с выходом датчика скорости вращения ротора, второй вход соединен с задающим входом первого компаратора, связанным с выходом управляемого коммутатора, коммутационные входы которого соединены с прямым и инверсным выходами третьего пропорционально-интегрального регулятора, а управляющий вход управляемого коммутатора соединен с выходом логического элемента И-НЕ, входы которого соединены с выходами пороговых элементов, при этом входы первого и второго пороговых элементов подключены соответственно к выходам датчика и задатчика скорости вращения ротора.
3. Устройство для управления асинхронным электроприводом,.содержащее электродвигатель с короткозамкнутым ротором, подключенный к выходу преобразователя частоты с управляющим входом, подключенным к трехфазному выходу блока преобразования координат, трехфазный вход которого соединен с выходом датчика фазных токов, три пропорционально-интеграллных регулятора с компараторами на входах, генератор опорных синусоидальных колебаний, соединенный выходами с опорными входами блока преобразования координат, информационные выходы которого соединены с информационными входами первого
и второго компараторов, выходы кото рых соответственно через первый и второй пропорционально-интегральные регуляторы соединены с управляющими входами блока преобразования координат, задающий вход второго компаратора соединен с выходом источника задания тока намагничивания, задающий и информационный входы третьего компаратора соединены соответственн с выходами задатчика и датчика скорости вращения ротора, а выход третьего компаратора через третий пропорционально-интегральный регулятор связан с задающим входом первго компаратора, отличающеес я тем, что, с целью повышения надежности путем рекуперации энергии стопорения ротора в сеть, введены управляемый коммутатор, два пороговых элемента, логический элемент И-НЕ и четвертый пропорционально-интегральный регулятор, выход которого соединен с входом генератора опорных синусоидальных колебаний, а вход соединен с задающим входом первого компаратора, связанным с выходом управляемого коммутатора. Коммутационные входы которого соединены с прямым и инверсным выходами третьего пропорционально-интегрального регулятора, а управляющий вход управляемого коммутатора соединен с выходом логического элемента И-НЕ, входы которого соединены с выходами пороговых элементов, при этом входы первого и второго пороговых элементов подключены соответственно к выходам датчика и задатчика скорости вращения ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухдвигательный электропривод | 1982 |
|
SU1577058A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем (его варианты) | 1983 |
|
SU1495969A2 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления /его варианты/ | 1982 |
|
SU1538212A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Электропривод переменного тока | 1987 |
|
SU1432711A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Электропривод переменного тока | 1987 |
|
SU1429273A1 |
1. Способ управления асинхронным электроприводом, при .котором измеряю-р мгновенную частоту вращения ротора, сравнивают ее с заданным значением, по результату сравнения в сумме с измеренной частотой вращения ротора регулируют частоту тока статора, измеряют активную и реактивную составляющие тока статора, сравнивают их с соответствующими заданиями; по результату этого сравнения регулируют активную и реактивную составляющие тока статора, отличающийся тем, что, с целью повышения надежности и улучшения энергетических показателей путем рекуперации энергии стопорения, фиксируют момент стопорения ротора, после чего изменяют на противоположное направление активной составляющей тока статора. 2. Устройство для управления асинхронным электроприводом, содержащее электродвигатель с короткозамкнутым .ротором, подключенный к выходу преобразователя частоты с управляющим входом, подключенным к трехфазно1 1у выходу блока преобразования коорди- , нат, трехфазный вход которого соединен с выходом датчика фазных токов, три пропорционально-интегральных регулятора с компараторами на входах, генератор опорных синусоидальных колебаний, соединенный вы(Л ходами с опорными входами блока преобразования координат, информационные ВЫХОДБ1 которого соединены с информационными входами .первого и второго компараторов, выходы которых соответственно через первый и второй пропорционально-интегральные регуля05 торы соединены с управляющими входами блока преобразования координат, 4 задающий вход второго компаратора со-00 единен с выходом источника задания сд тока намагничивания, задающий и информационный входы третьего компаратора соединены соответственно с выходами задатчика и датчика скорости вращения ротора, а выход третьего компаратора через третий пропорционально-интегральный регулятор связан с задающим входом первого компаратора, отличающееся тем, что, с целью повьш1ения надежности за счет рекуперации энергии стопорения ротора в сеть, введены управляемый коммутатор, два порого
1
Изобретение относится к электротехнике, а именно к электроприводу переменного тока с частотно-управляемым асинхронньм двигателем, и может быть применено в установках со стопорным характером нагрузки на валу вплоть до заклинивания рабочего органа, как плавном, так и скачкообразном, например, в горнопроходческих, очистных, буровых,
стругово-скреперных и других машинах.
Известен способ управления асинхронным электроприводом, при котором в случае возникновения стопорного момента на валу или заклинивания рабочего органа производят торможение вала электропривода с последующим отключением или реверсом 1 3.
3
Недостатком известного технического решения является низкая надежность, так как энергия стопорения вала электродвигателя расходуется на износ механизма вплоть до разрушения а также на нагрев электродвигателя.
Известно устройство для управле,ния асинхронным электроприводом, содержащее электродвигатель с короткозамкнутым ротором, подключенный к выходу преобразователя частоты с управляющим входом и силовой блок торможения в цепи статора, соединенный управляющим входом с датчиком тока статора, а выходом - с управляющим входом преобразователя частоты 1 J.
Недостаток известного устройстванизкая надежность, так- как энергия стопорения вала электродвигателя ра ходуется на износ механизма и на нагрев электродвигателя.
Наиболее близким по технической сущности и достигаемому результату к изобретению является способ управления асинхронным электроприводом, при котором измеряют мгновенную частоту вращения ротора, сравнивают ее с заданным значением, по результату сравнения в сумме с измеренной частотой вращения ротора регулируют частоту тока статора, измеряют активную и реактивную составляющие тока статора, сравнивают их с сЬответствующими заданиями, по результату этого сравнения регулируют активную и реактивную составляющие тока статора L2J.
Недостаток известного способа управления асинхронным электропри,водом заключается в низкой надежности в -режимах стопорения, так как способ не пред-усматривает отвода от электродвигателя, рабочего органа и трансмиссии энергии удара при возникновении стопорного момента нагрузки на валу, например, при заклинивании.
Наиболее, близким по технической сущности к изобретению является устройство для управления асинхронным электройриводом, содержащее электродвигатель с короткозамкнутьм ротором, подключенный к выходу преобразователь частоты, управляющий вход которого подключен к трехфазному выхог блока преобразования ко648514
ординат, трехфазный вход которого соединен с выходом датчика фазных токов, три пропорционально интегральных регулятора с компараторами на 5 - входах, генератор опорных синусоидальных колебаний, соединенный с опорными входами блока преобразования координат, информационные выходы которого соединены с информационJO ными входами первого и второго комп араторов, выходы которых через первый и второй пропорционально-интегральные регуляторы соединены с управляющими входами блока преобразования коорди|г нат, задающий вход второго компаратора соединен с выходом источника задания тока намагничивания, задающий и .информационный входы третьего компаратора соединены соответственно с
2Q задатчиком и датчиком скорости вращения ротора, а выход третьего компаратора через третий пропорционально-интегральный регулятор связан с задающим входом первого компарато25 Р ГЗ-.
Недостаток известного устройства низкая надежно.сть при возникновении стопорных нагрузок на валу, прикладываемых как скачком (в виде удара), так и постепенно, поскольку энергия стопорения затрачивается на разрушение трансмиссии машины.
Целью изобретения является повышение надежности и улучшение энергетических показателей за счет обеспечения рекуперации энергии стопорения ротора в сеть путем перевода электропривода в генераторный рекуперативный режим. I
Указанная цель достигается тем, что согласно способу управления асинхронным электроприводом, при котором измеряют мгновенную частоту
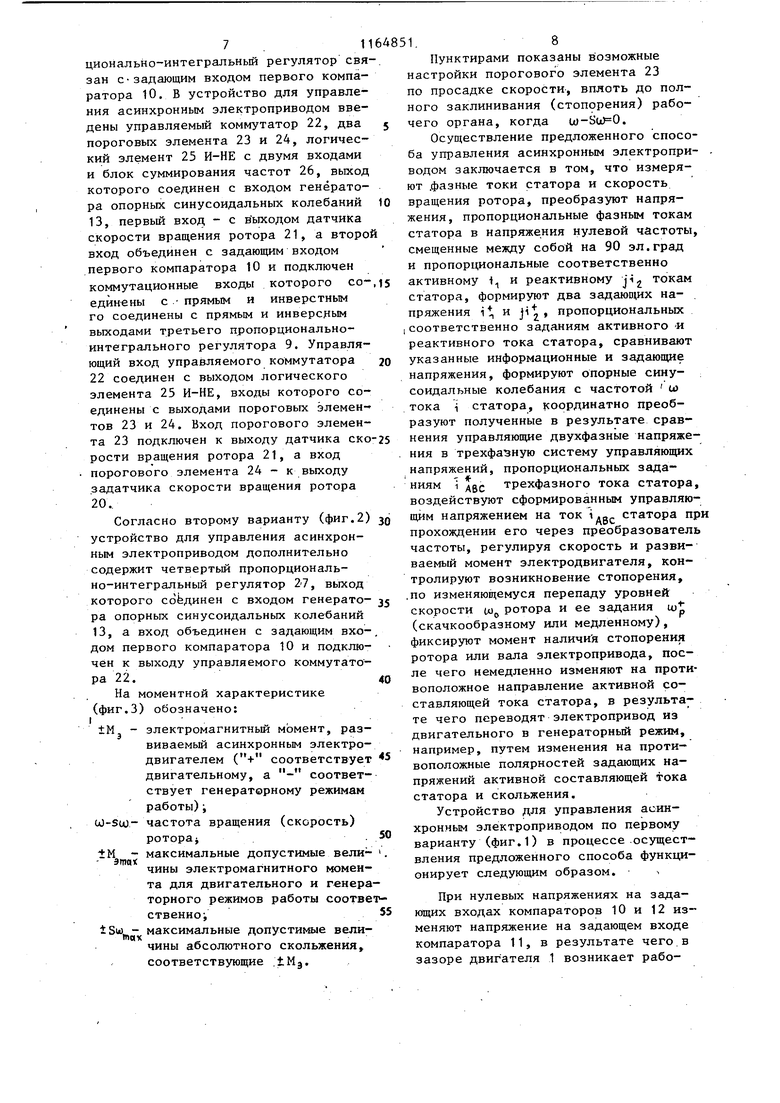
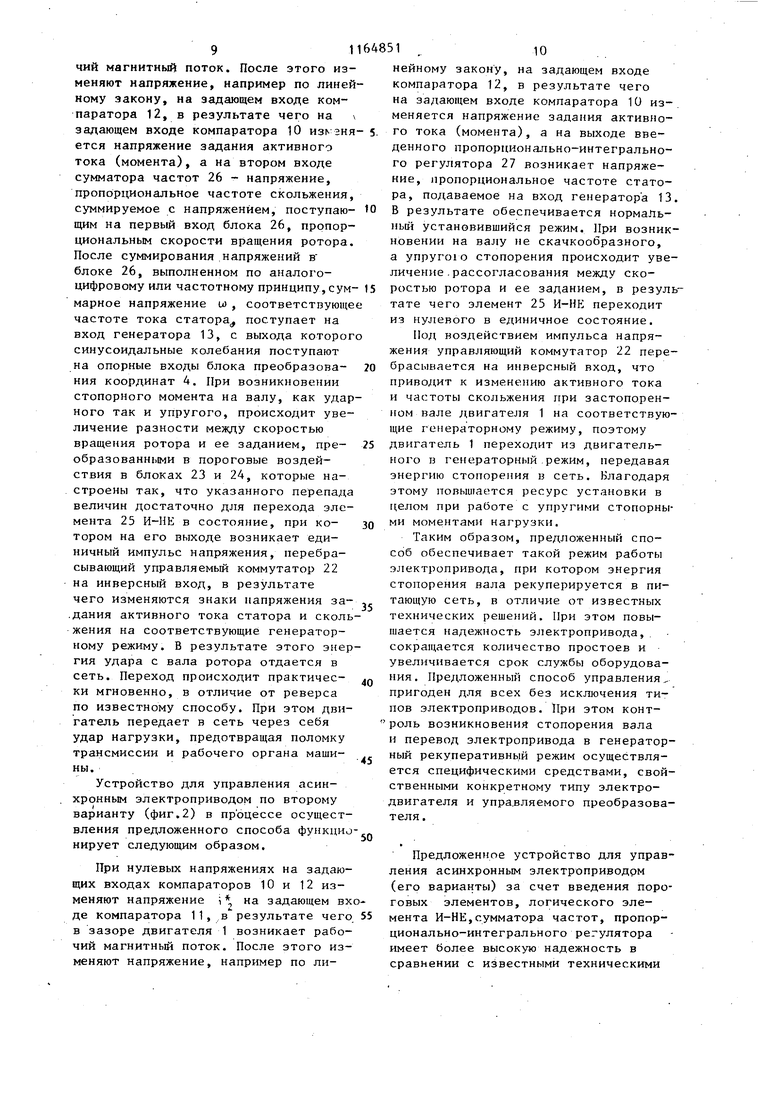
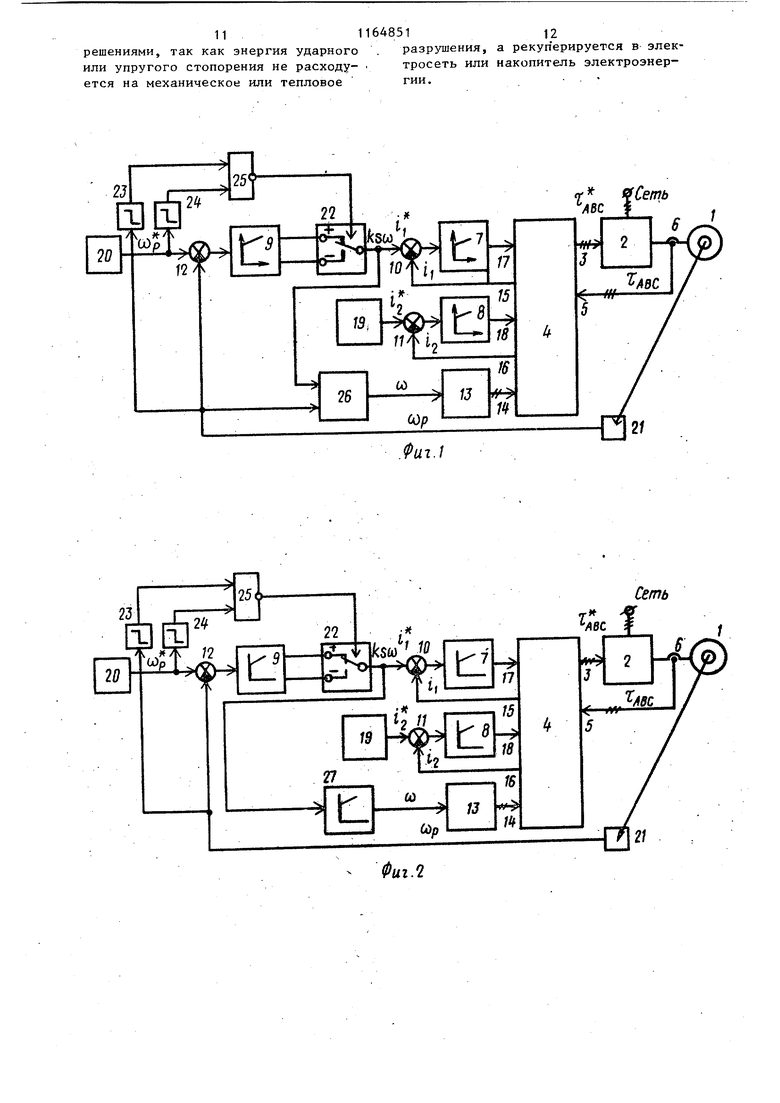
вращения ротора сравнивают ее с за-, данным значением, по результату сравнения в сумме с измеренной частотой вращения ротора регулируют частоту тока статора, измеряют активную и реактивную составляю1цие тока статора, сравнивают их с соответствующими заданиями, по результату этого сравнечия регулируют активную и реактивную составляющие тока , фиксируют момент стопорения ротора, после чего изменяют на противоположное направление активной составляющей тока статора. Указанная цель по первому варианту устройства достигается тем, что в устройство для управления асинхрон ным электроприводом, содержащее элек тродвигатель с короткозамкнутым ротором, подключенный к выходу преобра зователя частоты, управляющий вход которого подключен к трехфазному выходу блока преобразования координат, трехфазный вход которого соединен с выходом датчика фазных токов, три пропорционально-интегральных регулятора с компараторами на входах генератор опорных синусоидальных Колебаний, соединенный выходами с опорными входами блока преобразования координат, информационные выходы которого соединены с информационными входами первого и второго компараторов, выходы которых соответственно через первый и второй пропорционально-интегральные регуляторы соединены с управляющими входами блока преобразования координат, задающий вход второго компаратора соединен с выходом источника задания тока намагни чивания, задающий и информационный входы третьего компаратора соединены соответственно с выходами задатчика и датчика скорости вращения ротора, а выход третьего компаратора через третий пропорционально-интегральный регулятор связан с задающим входом первого компаратора, введены управляемьй коммутатор, два пороговых элемента, логический элемент И-ИЕ с двумя входами и блок суммирования частот, выход которого соединен с входом генератора опорных синусоидальных колебаний, первый вход - с выходами датчика скорости вращения ротора, а второй вход соединен с задающим входом первого компаратора, связанным с выходом управляемого ко мутатора, коммутационные входы кото рого соединены с прямым и инверсным выходами третьего пропорциональноинтегрального регулятора скорости, а управляющий вход управляемого ком мутатора соединен с выходом логичес кого элемента И-НЕ, входы которого соединены с выходами пороговых элементов, при этом входы первого и второго пороговых элементов подключен соответственно к выходам датчика и зад чика скорости вращения рочора. По второму варианту в устройство введены управляемый коммутатор, два пороговых элемента, логический элемент И-НЕ и четвертый пропорционально-интерральный ре гулятор, выход которого соединен с входом генератора опорных синусоидальных колебаний, а вход соединен с задающим входом первого компаратора, связанным с выходом управляемого коммутатора, коммутационные входы которого соединены с прямым и инверсным выходами третьего пропорционально-интегрального регулятора, а управляющий вход управляемого коммутатора соединен с выходом логического элемента И-НЕ, входы которого соединены с выходами пороговых элементов, при этом входы первого и второго пороговых элементов подключены соответственно к выходам датчика и задатМика скорости вращения ротора. На фиг.1 и 2 представлены вариан- . ты устройства для управления асинхронным электроприводом, на фиг.З моментная характеристика электропривода. Согласно первому варианту (фиг.1) устройство для управления асинхронным электроприводом содержит электродвигатель с короткозамкнутым ротором 1, подключенный к выходу преобразоватегля частоты 2 с управляющим входом, подключенным к трехфазному выходу 3 блока преобразования координат 4, трехфазный вход 5 которого соединен с выходом датчика фазных токов 6, пропорционально-интегральные регуляторы 7-9 с компараторами 10-12 на входах, генератор опорных синусоидальных колебаний 13, соединенных выходами с опорными входами 14 блока преобразования координат 4. Информационные выходы 15 и 16 блока преобразования координат 4 соединены с информационными входами первого и второго компараторов 10 и 11, выходы которых соответственно через пропорционально-интегргшьные регуляторы 7 и 8 соединены с управляющими входами 17 и 18 блока преобразования координат 4. , Задающий вход компаратора 11 соединен с выходом источника задания тока намагничивания 19. Задающий и информационный входы третьего компаратора 12 соединены соответственно с выходами задатчика 20 и датчика 21 скорости вращения ротора. Выход третьего компаратора 12 через пропорционально-интегральный регулятор свя зан с-задающим входом первого компаратора 10. В устройство для управления асинхронным электроприводом введены управляемый коммутатор 22, два пороговых элемента 23 и 24, логический элемент 25 И-НЕ с двумя входами и блок суммирования частот 26, выход которого соединен с входом генератора опорных синусоидальных колебаний 13, первый вход - с вьпсодом датчика скорости вращения ротора 21, а второ вход объединен с задающим входом .первого компаратора 10 и подключен коммутационные входы которого coединены с прямым и инверстным го соединены с прямым и инверсным выходами третьего пропорциональноинтегрального регулятора 9. Управляющий вход управляемого коммутатора 22 соединен с выходом логического элемента 25 И-НЕ, входы которого соединены с выходами пороговых элементов 23 и 24. Вход порогового элемента 23 подключен к выходу датчика ско рости вращения ротора 21, а вход порогового элемента 24 - к выходу задатчика скорости вращения ротора 20.
Согласно второму варианту (фиг.2) устройство для управления асинхронным электроприводом дополнительно содержит четвертый пропорционально-интегральный регулятор 27, выход которого соединен с входом генератора опорных синусоидальных колебаний 13, а вход объединен с задающим входом первого компаратора 10 и подключен к выходу управляемого коммутатора 22.
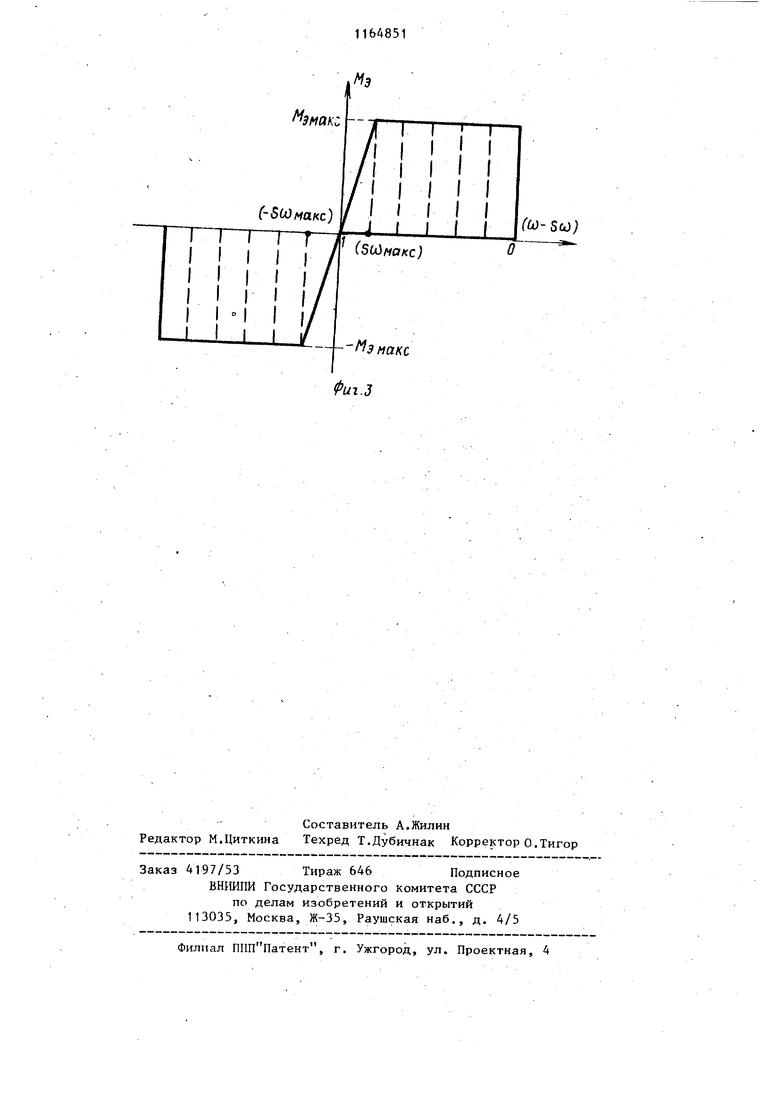
На моментной характеристике
(фиг.З) обозначено: I
±Mj - электромагнитный момент, развиваемый асинхронным электродвигателем (+ соответствует двигательному, а - соответствует генераторному режимам работы)i
co-sio- частота вращения (скорость)
ротораj.
1М - максимальные допустимые вели
atnniC
ЧИНЫ электромагнитного момента для двигательного и генераторного режимов работы соотвественно;iSu)- максимальные допустимые величины абсолютного скольжения соответствующие .tMj.
Пунктирами показаны возможные настройки порогового элемента 23 по просадке скорости, вплоть до полного заклинивания (стопррения) рабочего органа, когда u).
Осуп1ествление предложенного способа управления асинхронным электроприводом заключается в том, что измеряют .фазные токи статора и скорость вращения ротора, преобразуют напряжения, пропорциональные фазным токам статора в напряжения нулевой частоты смещенные между собой на 90 эл.град и пропорциональные соответственно активному 1 и реактивному ji токам статора, формируют два задаюпщх напряжения it, и Jit, пропорциональных (Соответственно заданиям активного -и реактивного тока статора, сравнивают указанные информационные и задающие напряжения, формируют опорные синусоидальные колебания с частотой ш тока i статора, соординатно преобразуют полученные в результате сравнения управляющие двухфазные напряжения в трехфазную систему управляющих напряжений, пропорциональных згщаниям i дц. трехфазного тока статора воздействуют сформированным управляющим напряжением на ток i.g статора п прохождении его через преобразовател частоты, регулируя скорость и развиваемый момент электродвигателя, контролируют возникновение стопорения, .по изменяющемуся перепаду уровней скорости u)p ротора и ее задания ю (скачкообразному или медленному), фиксируют момент наличия стопорения ротора или вала электропривода, после чего немедленно изменяют на противоположное направление активной составляющей тока статора, в результате чего переводят электропривод из двигательного в генераторный режим, например, путем изменения на противоположные полярностей задающих напряжений активной составляющей тока статора и скольжения.
Устройство для управления асинхронным электроприводом по первому варианту (фиг.1) в процессе .осуществления предложенного способа функционирует следующим образом.
При нулевых напряжениях на задающих входах компараторов 10 и 12 изменяют напряжение на задающем входе компаратора 11, в результате чего.в зазоре двигателя 1 возникает рабочий магнитный поток. После этого изменяют напряжение, например по линей ному закону, на задающем входе компаратора 12, в результате чего на задающем входе компаратора 10 ется напряжение задания активного тока (момента), а на втором входе сумматора частот 26 - напряжение, пропорциональное частоте скольжения, суммируемое с напряжением, поступающим на первый вход блока 26, пропорциональным скорости вращения ротора После суммирования напряжений в блоке 26, выполненном по аналогоцифровому или частотному принципу, сум марное напряжение w, соответствующе частоте тока статора поступает на вход генератора 13, с выхода которог синусоидальные колебания поступают на опорные входы блока преобразования координат 4. При возникновении стопорного момента на валу, как удар ного так и упругого, происходит увеличение разности между скоростью вращения ротора и ее заданием, преобразованными в пороговые воздействия в блоках 23 и 24, которые настроены так, что указанного перепада величин достаточно для перехода элемента 25 И-НЕ в состояние, при котором на его выходе возникает единичный импульс напряжения, перебрасывающий управляемый коммутатор 22 на инверсный вход, в результате чего изменяются знаки напряжения за.Дания активного тока статора и сколь жения на соответствующие генераторFtoMy режиму. В результате этого энер гия удара с вала ротора отдается в сеть. Переход происходит практически мгновенно, в отличие от реверса по известному способу. При этом двигатель передает в сеть через себя удар нагрузки, предотвращая поломку трансмиссии и рабочего органа машины. Устройство для управления асинхронным электроприводом по второму варианту (фиг.2) в процессе осуществления предложенного способа функцио нирует следующим образом. При нулевых напряжениях на задающих входах компараторов 10 и 12 изменяют напряжение на задающем вх де компаратора 11, в результате чего в зазоре двигателя 1 возникает рабочий магнитный поток. После этого изменяют напряжение, например по линейному закону, на задающем входе компаратора 12, в результате чего на задающем входе компаратора 10 из-, меняется напряжение задания активного тока (момента), а на выходе введенного пропорционально-интегрального регулятора 27 возникает напряжение, пропорциональное частоте статора, подаваемое на вход генератора 13. В результате обеспечивается нормаЛьньм установившийся режим. При возникновении на валу не скачкообразного, а упругого стопорения происходит увеличение .рассогласования между скоростью ротора и ее заданием, в результате чего элемент 25 И-НР переходит из нулевого в единичное состояние. Под воздействием импульса напряжения управляющий коммутатор 22 перебрасывается на инверсный вход, что приводит к изменению активного тока и частоты скольжения при застопоренном вале двигателя 1 на соответствующие генераторному режиму, поэтому двигатель 1 переходит из двигательного в генераторный режим, передавая энергию стопорения в сеть. Благодаря этому повышается ресурс установки в при работе с упругими стопорными моментами нагрузки. Таким образом, предложенный способ обеспечивает такой режим работы электропривода, при котором энергия стопорения вала рекуперируется в питающую сеть, в отличие от известных технических решений. При этом повышается надежность электропривода, сокра1цается количество простоев и увеличивается срок службы оборудования. Предложенный способ управления, пригоден для всех без исключения типов электроприводов. 11ри этом контроль возникновения стопорения вала и перевод электропривода в генераторный рекуперативный режим осуществляется специфическими средствами, свойственными конкретному типу электродвигателя и управляемого преобразователя. Предложенное устройство для управления асинхронным электроприводом (его варианты) за счет введения пороговых элементов, логического элемента И-НЕ,сумматора частот, пропорционально-интегрального регулятора имеет более высокую надежность в сравнении с известными техническими
111164851,2
решениями, так как энергия ударного . разрушения, а рекуперируется в элекили упругого стопорения не расходу- . тросеть или накопитель электроэнерется на механическое или тепловое гии.
.и-1.1
Фиг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 0 |
|
SU202282A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
