I входах регуляторов 7 и 8 активной н I реактивной составляющих вектора тока I статора асинхронного двигателя 1, Электропривод содержит сумматор 23 частот, входами соединенный с выходами регулятора П частоты вращения, и датчика J4 частоты вращения и вторыми входами блоков 15 и J6. Входы блоков 15 и 16 подключены к одним входам I сумматоров 19 и 20. Вторые входы сумматоров 19 и 20 соединены соответственно с выходами регулятора и бло- .ка 2. Управление преобразователем частоты 3 асинхронного двигателя 1 осуществляется блоком 5 преобразования координат, входы которого соединены соответственно с регуляторами 7 и 8, сумматоров 23 и датчиками 2 токов статора двигателя 1. В устройстве обеспечивается коррекция задающих воздействий внутренних контуров регулирования. При этом формируется разность между задающим и управляющим воздействиями на выходах сумматоров 25 и 27 соответственно.Управляющее воздействие является комбинированным т.к. сравнивается информация задающего воздействия с входов интегральных регуляторов с интегральным значением полного управляющего воздействия по активной и реактивной составляющим тока статора. I з.п.ф-лы, 2 ил.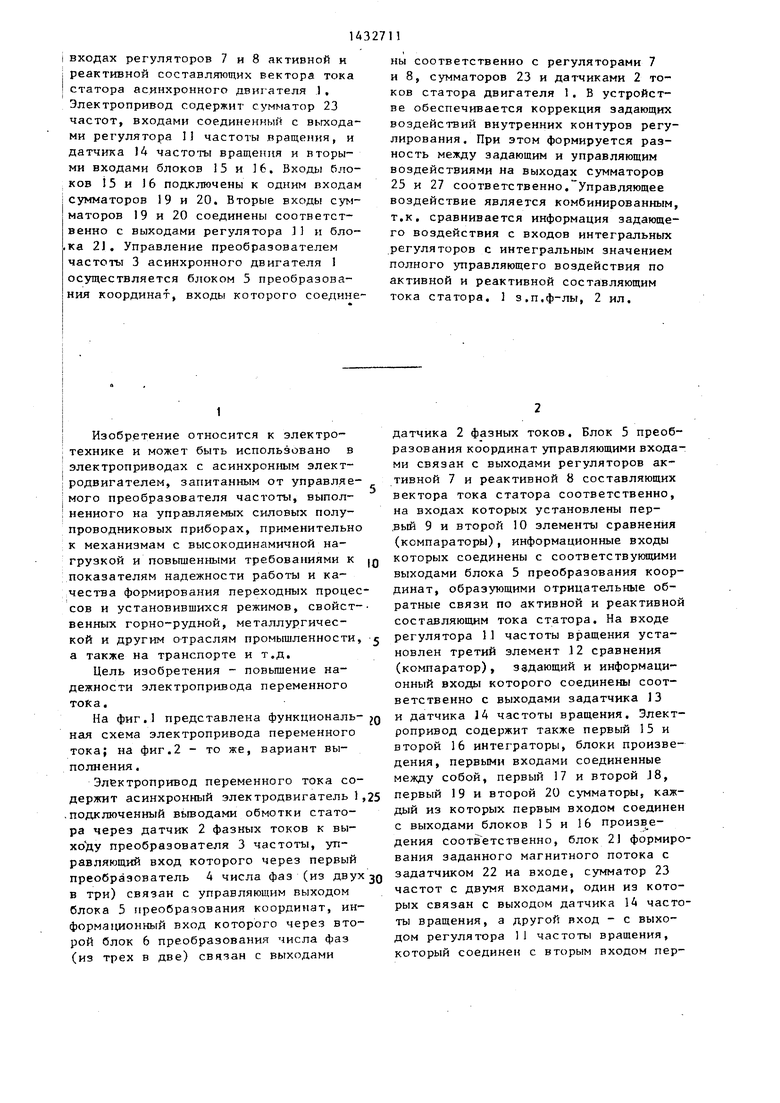
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1987 |
|
SU1429273A1 |
| Электропривод переменного тока | 1987 |
|
SU1429272A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления /его варианты/ | 1982 |
|
SU1538212A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
Изобретение относится к электротехнике и может быть использовано в горно-рудной и металлургической отраслях промышленности и на транспорте. Целью изобретения является повышение надежности электропривода переменного тока. Для этого в электропривод переменного тока введены сумматоры 24-27. Первые входы сумматоров 24 и 25 соединены с выходом регулятора J частоты, а сумматоров 26 и 27 - с выходом блока 21. Вторые входы сумматоров 25 и 27 соединены с выходами сумматоров 24 и 26 соответственно, а вторые входь ; сумматоров 24 и 26 - с выходами интеграторов 17 и 18. Выходы сумматоров 25 и 27 подключены к вто рым входам блоков 16 и 15 произведений, а выходы сумматоров 24 и 26 - соответственно к входам элементов 1 СЛ сравнения Ws установленных на л/ « 00 ьо Фа9.1
1
Изобретение относится к электротехнике и может быть использовано в электроприводах с асинхронным электродвигателем, запитанным от управляемого преобразователя частоты, выполненного на управляемых силовых полупроводниковых приборах, применительно к механизмам с высокодинамичной нагрузкой и повышенными требованиями к показателям надежности работы и качества формирования переходных процессов и установившихся режимов, свойственных горно-рудной, металлургической и другим отраслям промышленности, а также на транспорте и т.д.
Цель изобретения - повышение надежности электропривода переменного тока.
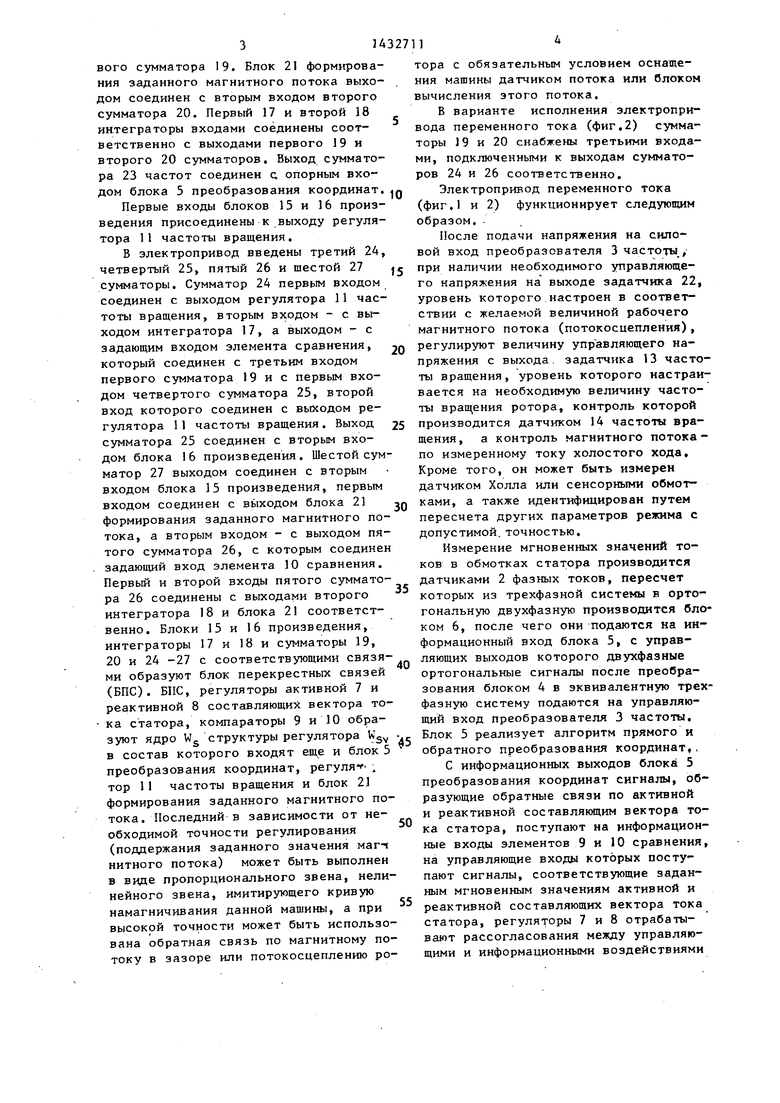
На фиг.1 представлена функциональ- ная схема электропривода переменного тока; на фиг.2 - то же, вариант выполнения .
Электропривод переменного тока содержит асинхронный электродвигатель 1 подключенный выводами обмотки статора через датчик 2 фазных токов к вы- хо ду преобразователя 3 частоты, управляющий вход которого через первый преобразователь 4 числа фаз (из двух в три) связан с управляющим выходом блока 3 преобразования координат, ин- форма1р1онный вход которого через второй блок 6 преобразования числа фаз (из трех в две) связан с выходами
датчика 2 фазных токов. Блок 5 преобразования координат управляющими входами связан с выходами регуляторов активной 7 и реактивной 8 составляющих вектора тока статора соответственно, на входах которых установлены пер- ,вый 9 и второй 10 элементы сравнения (компараторы), информационные входы которых соединены с соответствующими выходами блока 5 преобразования координат, образующими отрицательные обратные связи по активной и реактивной составляющим тока статора. На входе регулятора 11 частоты вращения установлен третий элемент 2 сравнения (компаратор), задающий и информационный входы которого соединены соответственно с выходами задатчика 13 и датчика 14 частоты вращения. Электропривод содержит также первый 15 и второй 16 интеграторы, блоки произведения, первыми входами соединенные между собой, первый 17 и второй J8, первый 19 и второй 20 сумматоры, каждый из которых первым входом соединен с выходами блоков 15 и 16 произв е- дения соотв етственно, блок 21 формирования заданного магнитного потока с задатчиком 22 на входе, сумматор 23 частот с двумя входами, один из которых связан с выходом датчика 14 частоты вращения, а другой вход - с выходом регулятора 11 частоты вращения, который соединен с вторым входом пер3U
вого сумматора 19. Блок 21 форм1фова- ния заданного магнитного потока выходом соединен с вторым входом второго сумматора 20. Первый 17 и второй 18 интеграторы входами соединены соответственно с выходами первого 19 и второго 20 сумматоров. Выход сумматора 23 частот соединен с, опорным входом блока 5 преобразования координат.
Первые входы блоков 15 и 16 произведения присоединены к выходу регулятора 11 частоты вращения,
В электропривод введены третий 24, четвертый 25, пятый 26 и шестой 27 сумматоры. Сумматор 24 первым входом соединен с выходом регулятора 11 частоты вращения, вторым входом - с выходом интегратора 17, а выходом - с задающим входом элемента сравнения, который соединен с третьим входом первого сумматора 19 и с первым входом четвертого сумматора 25, второй вход которого соединен с выходом регулятора 11 частоты вращения, Выход сумматора 25 соединен с вторым входом блока 16 произведения. Шестой сумматор 27 выходом соединен с вторым входом блока 15 произведения, первым входом соединен с вь ходом блока 21 формирования заданного магнитного потока, а вторым входом - с выходом пятого сумматора 26, с которым соединен задающий вход элемента 10 сравнения. Первый и второй входы пятого сумматора 26 соединены с выходами второго интегратора 18 и блока 21 соответственно. Блоки 15 и 16 произведения, интеграторы 17 и 18 и сумматоры 19, 20 и 24 -27 с соответствующими связями образуют блок перекрестных связей (БПС). БПС, регуляторы активной 7 и реактивной 8 составляющих вектора тока статора, компараторы 9 и 10 образуют ядро Wg структуры регулятора W в состав которого входят еще и блок 5 преобразования координат, регуля- тор 11 частоты вращения и блок 21 формирования заданного магнитного потока. Последний в зависимости от необходимой точности регулирования (поддержания заданного значения магч нитного потока) может быть выполнен в виде пропорционального звена, нелинейного звена, имитирующего кривую намагничивания данной машины, а при высокой точности может быть использована обратная связь по магнитному потоку в зазоре или потокосцеплению ро
л
r о 5 Q .
5
0
0
5
11
тора с обязательным условием оснащения машины датчиком потока или блоком вычисления этого потока,
В варианте исполнения электропривода переменного тока (фиг,2) сумматоры 9 и 20 снабжены третьими входами, подключенными к выходам сумматоров 24 и 26 соответственно.
Электропривод переменного тока (фиг,1 и 2) функционирует следующим образом, .
После подачи напряжения на силовой вход преобразователя 3 частоты / при наличии необходимого управляющего напряжения на выходе задатчика 22, уровень которого настроен в соответствии с желаемой величиной рабочего магнитного потока (потокосцепления), регулируют величину управляющего напряжения с выхода, задатчика 13 частоты вращения, уровень которого настраивается на необходимую величину частоты вращения ротора, контроль которой производится датчиком 14 частоты вращения, а контроль магнитного потока- по измеренному току холостого хода. Кроме того, он может быть измерен датчиком Холла или сенсорными обмотками, а также идентифицирован путем пересчета других параметров режима с допустимой, точностью.
Измерение мгновенных значений токов в обмотках статора производится датчиками 2 фазных токов, пересчет которых из трехфазной системы в ортогональную двухфазную производится блоком 6, после чего они подаются на информационный вход блока 5, с управляющих выходов которого двухфазные ортогональные сигналы после преобразования блоком 4 в эквивалентную трехфазную систему подаются на управляющий вход преобразователя 3 частоты. Блок 5 реализует алгоритм прямого и обратного преобразования координат,,
С информационных выходов блока 5 преобразования координат сигналы, об разующие обратные связи по активной и реактивной составляющим вектора тока статора, поступают на информационные входы элементов 9 и 10 сравнения, на управляющие входы которых поступают сигналы, соответствующие заданным мгновенным значениям активной и реактивной составляющих вектора тока статора, регуляторы 7 и 8 отрабатывают рассогласования между управляющими и информационными воздействиями
514
внутренних контуров регулирования,что задания на управляющих входах внешних контуров по частоте, вр.ащения и магнитному потоку выполняются во всех режимах ,
Между внешними контурами регулиро- :вания частоты вращения и магнитного потока расположен блок .перекрестных :связей для обеспечения автономности I(развязки) каналов управления активны iми и реактивными составляющими век- I торов переменных режима при достиже- 1 НИИ вполне определенных значений коэффициентов усиления внутренних и внешних замкнутых контуров системы электропривода,.
Рассмотрим роль перекрестных связей, образованных блоком перекрестных связей, в системе электропривода. Перекрестные связи в предлагаемом электроприводе подаются на управляю- Iщие входы элементов 9 и 10 сравнения, |а не на выходы регуляторов активной |и реактивной составляющих тока ста- JTOpa, т.е. производится коррекция за- I дающих-управляющих воздейстЛ1Й внут- Iренних контуров регулирования, а не сформированных по отклонению управляющих воздействий, как это делается |В известном устройстве. При этом фор-- мируется разность между задающим и ;управляющим воздействием на выходах I сумматоров 25 и 27 соответственно. :Указанная разность является комбини- рованным управляющим воздействием, так |как сравнивается информация задающего воздействия с входов интеграторов 17 и 1-8 с интегральным значением полного управляющего воздействия по активной и реактивной составляющим тока статора. Сформированное таким образом корректирующее воздействие после умножения на задание, абсолютного скольжения подается, в противоположные каналы управ ления составляющих проекций тока статора. Роль перекрестных связей в данной структуре сводится к функциональному назначению - обеспечить автономность каналов управления при меньших коэффициентах усиления, а также обеспечить возможность пересчета задания по трудноизмеряемой переменной режима в управляющее воздействие по легкоизмеряемой переменной режима, прежде всего тока статора. Т.е. производить операцию, аналогичную идентификации параметров режима, для которых сформулирован закон управления,
116
но не поддающихся непосредственному измерению.
При отсутствии блока перекрестных связей, как показывают исследования, автономность каналов достигается при больших коэфициентах усиления, в результате чего система становится более жесткой в переходных режимах,но устойчивости не теряет. Это свойство предлагаемой системы электропривода - оставаться устойчивой и без перекрестных связей, в отличие от известных систем, использующих принцип ориентации по вектору какой-либо переменной режима, в частности потокосцеп ления ротора, которые оказываются неустойчивыми без компенсирующих, перекрестных связей.
Таким образом, организация новых перекрестных связей на управляющих входах регуляторов активной и реактивной составляющих тока статора обеспечивает в сравнении с известным решением повьштение надежности электропривода переменного тока и его упрощение.
Формула изобретения
. Электропривод переменного тока, содержащий асинхронный электродвигатель, .обмотка статора которого через датчик фазных токов подключена к выходу управляемого преобразователя час- тоты, блок преобразования координат, выполненный с двумя информационными, двумя управляющими и опорными входами с двумя управляющими и двумя информационными выходами, первый преобразователь числа фаз, подключенный входами к управляющим выходам блока преобразования координат, а выходами - к управляющим входам управляемого преобразователя частоты, второй преобразователь числа фаз, подключенный входами к выходам датчика фазных токов, а выходами - к информационным входам блока преобразования координат, регуляторы активной и реактивной составляющих вектора тока статора, на входах которых установлены соответственно первый и второй элементы сравнения подключенные информационными входами к соответствующим информационным выходам блока преобразования координат, управляющие входы которого подключены соответственно к выходам регуляторов активной и реактивной состав71Д
ляющнх вектора тока статора, регулятор частоты вращения, на входе которого установлен третий элемент сравнения, эадаюпщй и информационный входы которого соединены соответственно с выходами задатчика и датчика частоты вращения ротора асинхронного электродвигателя, первый и второй блоки произведения с двумя входами каждый , первые входы которых соединены между собой, а выходы подключены к первым входам первого и второго сумматоров соответственно, первьгй и второй интеграторы, блок формирования заданно- го магнитного потока, о тличаю- щ и и с я тем, что, с целью повышения надежности, в него введены сумматор частот с двумя входами, третий, четвертый, пятый и шестой сумматоры, каждый из которых снабжен двумя входами, выход регулятора частоты вращения соединен с вторым входом первого сумматора, с первыми входами третьего и четвертого сумматоров, с первыми вхо- дами блоков произведения и с первым входом сумм атора частот, второй вход которого подключен к выходу датчика частоты вращения, вьпсод сумматора частот соединен с опорным входом бло- ка преобразования координат, вход первого интегратора соединен с выхоП8
дом первого сумматора, а выход - с вторым входом третьего сумматора, выход которого подключен к задающему входу элемента сравнения регулятора активной составляющей вектора тока статора, выход блока формирования заданного магнитного потока соединен с вторым входом второго сумматора и с первыми входами пятого и шестого сумматоров, вход второго интегратора связан с выходом второго сумматора, а выход - с вторым входом пятого сумматора, выход которого подключен к задающему входу элемента сравнения регулятора реактивной составляющей вектора тока статора, с выходом третьего сумматора соединен второй вход четвертого сумматора, выход которого подключен к второму входу второго блока произведения, с выходом пятого сумматора соединен второй вход шестого сумматора, выход которого подключен к второму входу первого, блока произведения,
2, Электропривод по п.1, отличающийся тем, что первый и второй сумматоры снабжены третьими входами, подключенными соответственно к выходам третьего и шестого сумматоров .
snc
f .
Фиъ.2.
Ws H/s
| Бродовский В.Н., Иванов Е.И | |||
| Приводы с частотно-токовым управлением- | |||
| М.: Энергия, 1974, с.23, 42, 135 | |||
| Слежановский О.В., Дацковский Л.Х и др | |||
| Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями | |||
| М.: Знергоатомиздат, 1983, с | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
