ной составляющих вектора тока статора, на входе каждого из которых установлен один из элементов сравнения 9,10. Входы элементов сравнения 9, 10 подключены соответственно к информационным выходам преобразователя 5 и выходам интеграторов 17, 18. Выход регулятора 11 соединен с первыми входами сумматора 19-и блоков 15, 16 произведения, вторыми входами соединенных с выходами интеграторов 7, 18, а выходами с вторыми входами сумматоров 19, 20. Второй вход сумматора 20 подключен к выходу блока 21 формирования заданного магнитного потока. Наличие перекрестных связей
обеспечивает коррекцию задающих управляющих воздействий внутренних контуров регулирования. Интегральные значения управляющего воздействия, умноженные на задания абсолютного скольжения, подаются в противоположные каналы управления составляющих проекций тока статора двигателя 1. В устройстве обеспечиваются автон омность каналов управления с меньшими коэффициентами усиления и возможность пересчета задания по трудноизмеряемой переменной режима в управляющее воздействие по легкоизмеряемой переменной режима. 1 з.п.ф-лы, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1987 |
|
SU1429272A1 |
| Электропривод переменного тока | 1987 |
|
SU1432711A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления (его варианты) | 1982 |
|
SU1164851A1 |
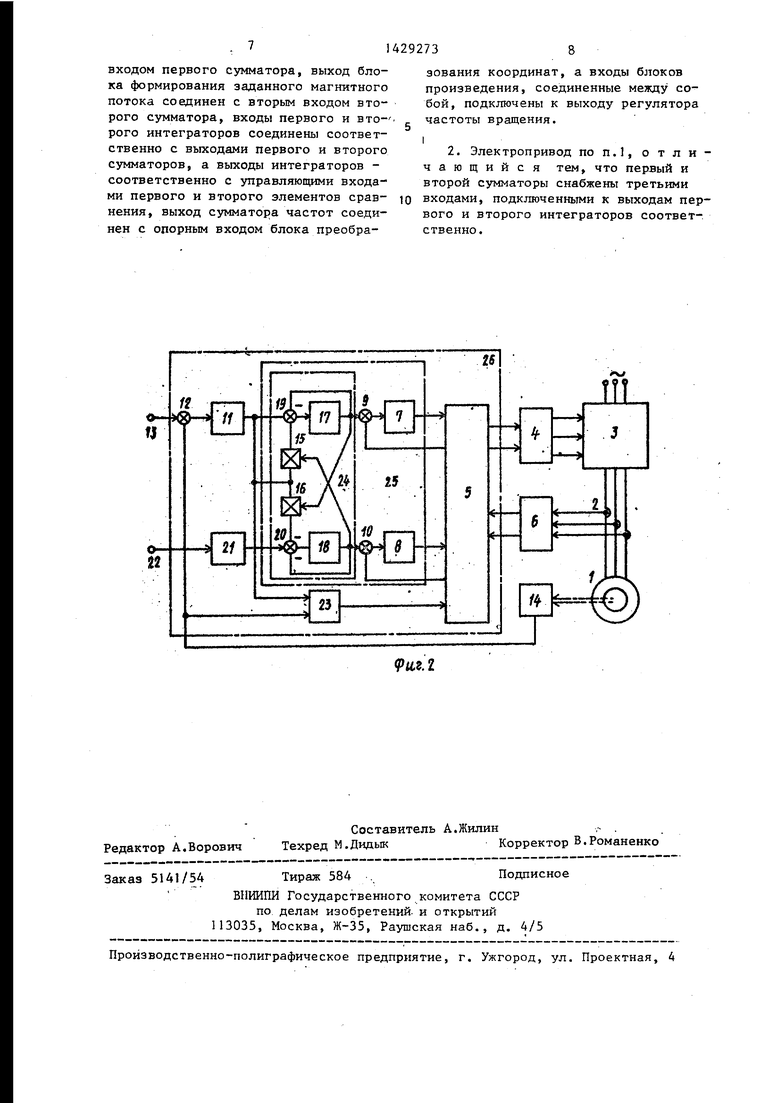
Изобретение относится к электротехнике и может быть использовано в горнорудной и металлургической промышленности, на транспорте. Целью изобретения является повьт1ение надежности и упрощение, В электропривод переменного тока введен сумматор 23 частот с двумя входами. Один вход сумматора 23 соединен с выходом датчика 14 частоты вращения ротора асинхронного двигателя 1, а другой вход - с выходом регулятора 11 частоты вращения . Выход сумматора 23 подключен к опорному входу преобразователя 5 координат. Асинхронный двигатель 1 питается от сети через преобразователь частоты 3, управляющие входы которого соединены с управляющими выходами преобразователя 5 через преобразова- тель 4 числа фаз. Датчик 2 тока ста- торной обмотки двигателя 1 через npe-i образователь фаз соединен с информа- Л ционными входами преобразователя 5. Преобразователь 5 выполняет функции- прямого и обратного . преобразований ::; координат. Управляющие входы преобра- зователя 5 подключены соответственно к регуляторам 7 , 8 активной и реактив- СО tND СО Ц.1. f
Изобретение относится к электротехнике и может быть использовано в электроприводах с асинхронным электродвигателем, питаемым от преобразователя частоты, выполненного на управляемых силовых полупроводниковых приборах, например, непосредственного преобразователя частоты, инвертора с ШИМ или автономного и других, при-; менительно к машинам и механизмам с высокодинамической нагрузкой и повы- ,шенными требованиями к показателям надежности работы и качества формирования переходных процессов и установившихся режимов, свойственных горнорудной, металлургической отраслям промышленности, на транспорте и т.д.
Цель изобретения - повышение надежности и упрощение электропривода переменного тока.
На фиг t 1 и 2 представлены функциональные схемы электропривода переменного тока, первый и второй варианты.
Электропривод переменного тока (фиг..,1) содержит асинхронный электродвигатель 1, подключенньш выводами обмотки статора через датчик 2 фаз- ньвс токов к выходу преобразователя 3 частоты, управляющий вход которого через первый преобразователь 4 числа фаз (из двух в три) связан с управляющим выходом блока преобразования координат (ВПК) 5, информационный вход
которого через второй блок 6 преобразования числа фаз (из трех в две) связан с выходами датчика 2 фазных токов. ВПК 5 управляющими входами связан с выходами соответствующих регуляторов 7 и 8 - активной и реактивной составляющих вектора тока статора, на входах которых установлены первый и второй элементы 9 и 10 сравнения
(компараторы), информационные входы которых соединены с соответствующими выходами ВПК, образующими отрицательные-обратные связи по активной и реактивной составляющим тока статора,
регулятор 11 частоты вращения, на входе которого установлен третий элемент. 12 сравнения (компаратор), задающий и информационный входы которого соединены соответственно с выходами
задатчика 13 и датчика 14 частоты вращения, первый и второй блоки 15 и 16 произведения, одними входэ.ми соединенные между собой, а другими входами -соединенные с выходами первого и второго интеграторов 17 и 18 соответственно, первый и второй сумматоры и 20, каждый из которых одним входом соединен с выходами двух блоков 15 и 16 произведения соответственно
блок 21 формирования заданного маг- ; нитного потока с задатчиком 22 на входе, сумматор 23 частот с двумя входами, оДин из которых соединен с выходом датчика 14 частоты вращения, а
314292734
другой вход - с выходом регулятора22, уровень которого настроен в соот11 частоты вращения, который соединенветствнии с желаемой величиной рабос вторым входом первого сз мматора 19.чего магнитного потока (потокосцеплеБлок 21 формирования заданного маг-ния), регулируют величину управляющенитного потока выходом соединен свто-го напряжения с выхода задатчика 13
рым входом второго сумматора 20. Пер-частоты вращения ротора, уровень ковый и второй интеграторы 17 и 8вхо-торого настраивается в соответствии
дами соединены соответственно с выхо-с желаемой величиной частоты вращения
дами первого и второго сумматоров 19 Qротора асинхронного электродвигателя
и 20, а выходы первого и второго ин-I, контроль которой производится даттеграторов 17 и 18 соединены соответ-чиком 14 частоты , а магнитственно с управляющими входами перво-кого потока - по измеренному току хого и второго элементов 9 и 10 сравне-лостого хода. Кроме того, он может
ния, выход сумматора 23 частот соеди- gбыть измерен датчиком Холла или сеннен с опорным входом ВПК 5. Входы бло-сорными обмотками, а также идентификов 15 и 16 произведения, которымицирован путем пересчета других параони соединены между собой, присоеди-метров режима с допустимой точностью.
нены к выходу регулятора 11 частотыИзмерение мгновенных значений токов
вращения. Блок перекрестных связей jnв обмотках статора производится дат(БПС) 24 включает в себя блоки 15 ичиком 2 фазных токов, пересчет кото16 произведения, интеграторы 17 и 18,рых из трехфазной системы в ортогоа также сумматоры 19 и 20. Блок 25,нальную двлосфазную производится блообразующий ядро W структуры регуля-ком 6, после чего они подаются на ин- тора W , включает в себя, кроме ука- 25 формациониый вход ВПК 5, с управляюзанного блока 24, регуляторы 7 и 8 сщих выходов которого двухфазные ортоэлементами 9 и 10 сравнения на входахтональные сигналы после преобразовасоответственно. Блок 26, включающийния блоком 4 в эквивалентную трехфаз
в себя, кроме указанного блока 25,ную систему подаются на управляющий
. БПК 5j регулятор П частоты вращения, о вход преобразователя 3 частоты. БПК 5
блок 21 формирования заданного маг-реализует алгоритм прямого и обратнонитного- потока, а также сумматор 23го преобразований координат. С инфорчастот, образует полную структуру ре-мационных выходов БПК 5 сигналы, обгулятора, объединяющую как внутренние,раз тощие обратные связи по активной
так и внешние контуры регулирования.и реактивной составляющим вектора тоБлок 21 в зависимости от необходимойка статора, пост шадат на информационточности регулирования может быть вы-ные входы элементов 9 и 10 сравнения,
полнен в виде пропорционального зве-на управляющие входы которых поступана, нелиней ного звена, имитирующегоют сигналы, соответствующие заданным
кривую намагничивания данной машины,мгновенньй значениям aктIiвнoй и реака при высокой точности может быть ис-тивной составляющих вектора тока ста-
пользована обратная связь по магнит-тора. Регуляторы 7 и 8 отрабатьшаиот
ному потоку в зазоре или потокосцеп-рассогласования между управляющими и
лению ротора с обязательным условиеминформационными воздействиями внутоснащения машины датчиком потока илиренних контуров регулирования таким
блоком вычисления этого потока.образом, чтобы задания на управляющих
Электропривод переменного токавходах внешних контуров по частоте (фиг.2) содержит все без исключениявращения и магнитному потоку были вы- блоки и функциональные связи, что иполнены во всех режимах. Между внеш- на фиг.1, но при этом сумматоры 19 иними контурами регулирования частоты 20 снабжены третьими входами, подклю-вращения и магнитного потока в блоках ченными к выходам интегратора 17 и 1811 и 21 соответственно расположен БПС соответственно.24 для обеспечения автономности (раз- Электропривод переменного токавязки) каналов управления активными и функционирует следующим образом. /реактивными составляющими векторов пе- После подачи напряжения питания наре 1енных режима при достижении вполне силовой вход преобразователя 3 часто-определенных значений коэффициентов ты, при наличии необходимого управля-усиления внутренних и внешних эамкн ющего напряжения на выходе задатчикатьк контуров системы электропривода.
5
Рассмотрим роль перекрестных связей, образованных блоком 24, В электроприводе. Принципиальное отличие этих перекрестных связей от известных решений состоит в том, что они подаются на управляющие входы элементов 9 и 10 сравнения, а не на вы14292736
шением повышение надежности электропривода переменного тока и его упрощение .
Формула изобретения
ХОДЫ регуляторов активной и реактивной составляющих тока статора, т.е. Производится коррекция задающих управляющих воздействий внутренних |сонтуров регулирования, а не сформированных по отклонению управляющих воздействий, как это делается в изве- стном устройстве. При этом интеграль- JHoe значение управляющего воздействия, умноженное на задание абсолютного скольжения, подается в противопо- |ложные каналы управления составляю- bujx проекций тока статора. Полученное управляющее воздействие является комбинированным, так как содержит в себе информацию о возмущении нагрузки на :валу, получаемую с выхода регулятора 11 частоты вращения. Роль перекрестных связей в данной структуре сводится к функциональному назначению - обеспечить автономность каналов управления при меньших коэффитдаентах усиле)1ия, а также обеспечить возможность пересчета задания по трудноизмеряемой переменной режима в управляющее воздействие по легко измеряемой переменной режима, прежде всего тока статора, т.е. производить операцию, аналогичную идентификации параметров рсл;има, для которых сформулирован закон управления, но не поддающихся непосредственному измерению. При отсутствии БПС 24 автономность каналов достигается при больших коэффициен- тах усиления, в результате чего система становится болэе жесткой в переходных режимах, но устойчивости не теряет. Для данной системь электропривода свойственно оставаться устойчивой и без перекрестных связей, в отличие от известных систем, использующих принцип ориентации по вектору какой-либо переменной реж1ша, в частности потокосцепления ротора, которы являются неустойчивыми бек компенси- рую днх-перекрестных связей.
Таким образом, организация новых перекрестных связей на управляющих входах регуляторов активной и реактивной составляющих тока статора обес печ1шает в сравнении с известным ре
0
0
g
Формула изобретения
5 фазных токов, а выходами - к информационным входам блока преобразования координат, регуляторы активной и реактивной составляющих вектора тока статора, на входах которых установлены соответственно п:ервый и второй элементы сравнения, подключенные информационными входами к соответствующим информационным выходам блока преобразования координат, управляющие входы которых подключены соответственно к Выходам регуляторов активной и реактивной составляющих вектора тока статора, регулятор частоты вращения, на входе которого установлен третий элемент сравнения, задающий и информационный входы которого соединены соответственно с выходами задат- чика и датчика частоты вращения вала ротора асинхронного электродвигателя,
5 два блока произведения, первыми входами соединенные между собой, а вто- рьми входами - с выходами двух интеграторов соответственно, два ра, каждый из которых первым входом подкллочен к выходу соответствующего . блока произведения, блок формировав ння заданного магнитного потока, о т- личаюцийся тем, что, с целью повышения надежности и упрощения, введен сумматор частот с двумя входами, один из которых соединен с выходом датчика частоты вращения, а другой - с выходом регулятора частоты вращения, который соединен с вторым
5
0
0
5
входом первого сумматора, выход блока формирования заданного магнитного потока соединен с вторым входом второго сумматора, входы первого и вто- рого интеграторов соединены соответственно с выходами первого и второго сумматоров, а выходы интеграторов - соответственно с управляющими входами первого и второго элементов сравнения, выход сумматора частот соединен с опорным входом блока преобра
эования координат, а входы блоков произведения, соединенные между собой, подключены к выходу регулятора частоты вращения.
I
ч/
| Бродовский В.Н., Иванов E.G | |||
| Приводы с частотно-токовым управлением | |||
| М.: Энергия, 1974, с.23,42, 135 | |||
| Слежановский О.В., Дацковский Л.Х | |||
| и др | |||
| Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями | |||
| М | |||
| : Энергоатомиздат, 1983, с.109-128 |
