Изобретение относится к электротехнике и может быть использовано при автоматизации технологических процессов.
Целью изобретения является повышение помехоустойчивости СЭП.
Ка фиг. 1 показана функциональная схема СЭП; на фиг. 2 - временные диаграммы его сигналов.
В состав привода (фиг. 1) входят сумматор 1, интегратор 2, релейный элемент 3, исполнительный электродвигатель 4, датчик 5 положения (например, сельсин или вращающийся трансформатор), делитель 6 частоты, инвертор 7, первый 8 и второй 9 ключевые элементы, объект 10 регулирования, клемма 11 для подключения сигнала задания.
Устройство работает следукщим образом.
Сумматор 1, интегратор 2, релейный элемент 3 в совокупности образуют автоколебательный каскад преобразования с частотно-широтно-импульсной модуля1щей. При отсутствии сигнала задания на клемме 11 выходной сигнал релейного элемента 3 имеет среднее нулевое значение.
Наличие сигнала задания на входе привода приводит к изменению скважности импульсов у,(t) на выходе элемента 3 (фиг. 26). В интервале времени несовпадения знаков сигнала задания выходной сигнал у. (t) интегратоpa 2 изменяется под действием разности токов входного и цепи обратной связи автоколебательного каскада привода. В интервале времени совпадения сигналов на входе сумматора 1 и выходе релейного элемента 3 производная выходная выходного сигнала интегратора 2 увеличивается (фиг. 26 где fc- пороги переключения релейного элемента 3).
В результате за период колебаний Т5 постоянная составляющая выходного сигнала элемента 3 устанавливается пропорциональной уровню задающего воздействия (сигналу рассогласования привода).
Делитель 6 частоты преобразует выходной сигнал релейного элемента 3 (фиг. 26) в биполярные импульсы со средним нулевым значением и с
периодом, в раза превьшающим период Тд сигнала у (t).
Выходной сигнал делителя 6 играет роль несущих колебаний датчика 5 положения и одновременно управляет работой ключевых элементов 8 и 9.
Выходной сигнал yj-(t) датчика 5 положения (фиг. 2в) имеет период, равный периоду сигнала у(t)(фиг.2а) а также амплитуду и фазу, зависящую от положения вала электродвигателя 4
При положительной полярности выходного сигнала делителя 6 частоты в замкнутое положение переходит элемент 8 (фиг. 2г), а при отрицательной полярности импульсов (фиг. 2а) замыкается элемент 9 (фиг. 2).
При замыкании элемента 8 ни вход сумматора 1 подается положительнь й импульс ye(t) сигнала yj.(t), что вызывает изменение скважности выходного сигнала релейного элемента 3 (появление на его выходе постоянной составляняцей отрицательного уровня) .
В последующем цикле Т автоколебаний элемента 8 размыкается, а элемент 9 переходит в замкнутое положение (фиг2). С помощью инвертора 7 импульс y,(t) отрицательной полярности (фиг. 2в) меняет знак на противоположньй, и на вход автоколебательного каскада ОЭП вновь поступает импульс y(t) положительного знака.
По истечении определенного числа периодов автоколебаний сигнал рассогласования на входе СЗП становится равным нулю, и скважность импульсов y(t) достигает величины 0,5 (нулевой уровень постоянной составляющей)
Таким образом, преимуществом предлагаемого изобретения является жесткая синхронизация частот выходных сигналов автоколебательного тракта преобразования и делителя 6 частоты, выполняющего функции генератора несущих колебаний для датчика 5 положения В этом случае помехи, трансформируемые в каналы преобразования блока 3, не могут вызвать его ложного срабатывания, так как момент времени их возникновения совпадает с моментом времени изменения знака сигнала у(t).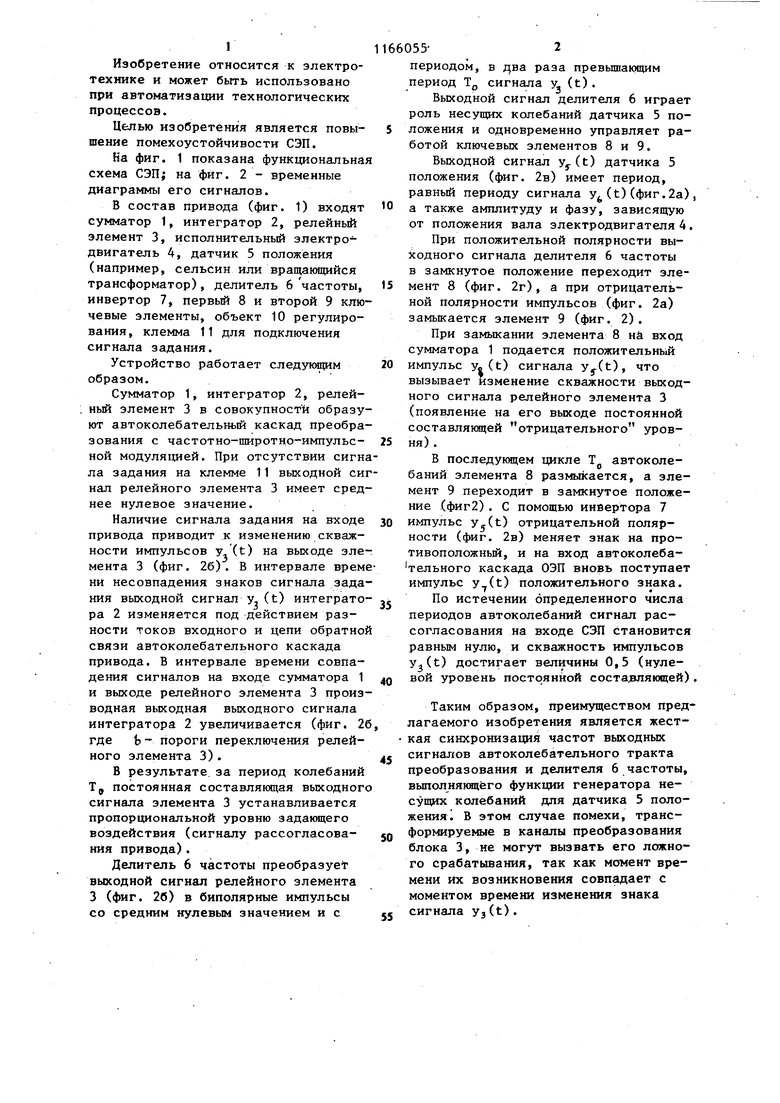
| название | год | авторы | номер документа |
|---|---|---|---|
| Развертывающий операционный усилитель с непрерывным контролем | 1983 |
|
SU1145350A1 |
| Система подчиненного регулирования | 1984 |
|
SU1238024A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОПРИВОДОВ С ПАРАЛЛЕЛЬНЫМИ КАНАЛАМИ РЕГУЛИРОВАНИЯ | 2014 |
|
RU2565598C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2006 |
|
RU2312452C1 |
| Развертывающий автоколебательный операционный усилитель | 1980 |
|
SU862149A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2003 |
|
RU2251206C2 |
| Система управления | 1984 |
|
SU1211688A1 |
| Система автоматического управления | 1984 |
|
SU1249490A1 |
| Развертывающий преобразователь | 1984 |
|
SU1234852A1 |
| Устройство для управления тиристорным инвертором | 1985 |
|
SU1275709A1 |
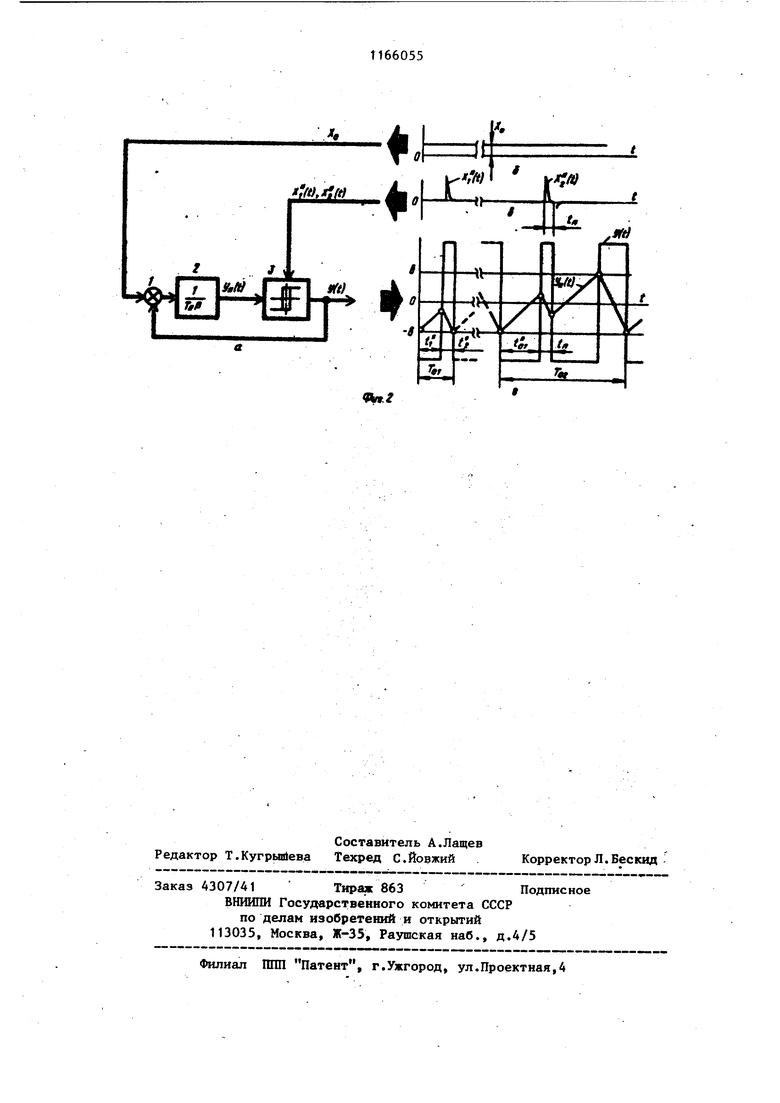
СЛЕДЯЩИЙ ПРИВОД, содержащий последовательно соединенные источники сигнала задания, сумматор, интегратор, релейньй элемент, электродвигатель и объект регулирования. агорой вход сумматора соединен с выходом релейного элемента, вал электродвигателя соединен с входом датчика положения, отличающийс я тем, что, с целью повышения помехоустойчивости, в него введены делитель частоты, инвертор и первый и второй ключевые элементы, выход делителя частоты соединен с входом датчика положения и с управлямооти входами первого и второго ключевых элементов, а выход датчика положения через первый ключевой элемент соединен с вторым входом сумматора и через последовательно соединенные второй ключевой элемент и инвертор подключен к третьему входу сумматосл ра. Од О) о ел сд
| Системы локальной автоматики транспортной машины, с газотурбинной силовой установкой | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
