Изобретение относится к автоматизированному электроприводу и предназначено для автоматизации технологических процессоп.
Цель изобретения - увеличение помехозащищенности системы подчиненног о ре1 улирования,
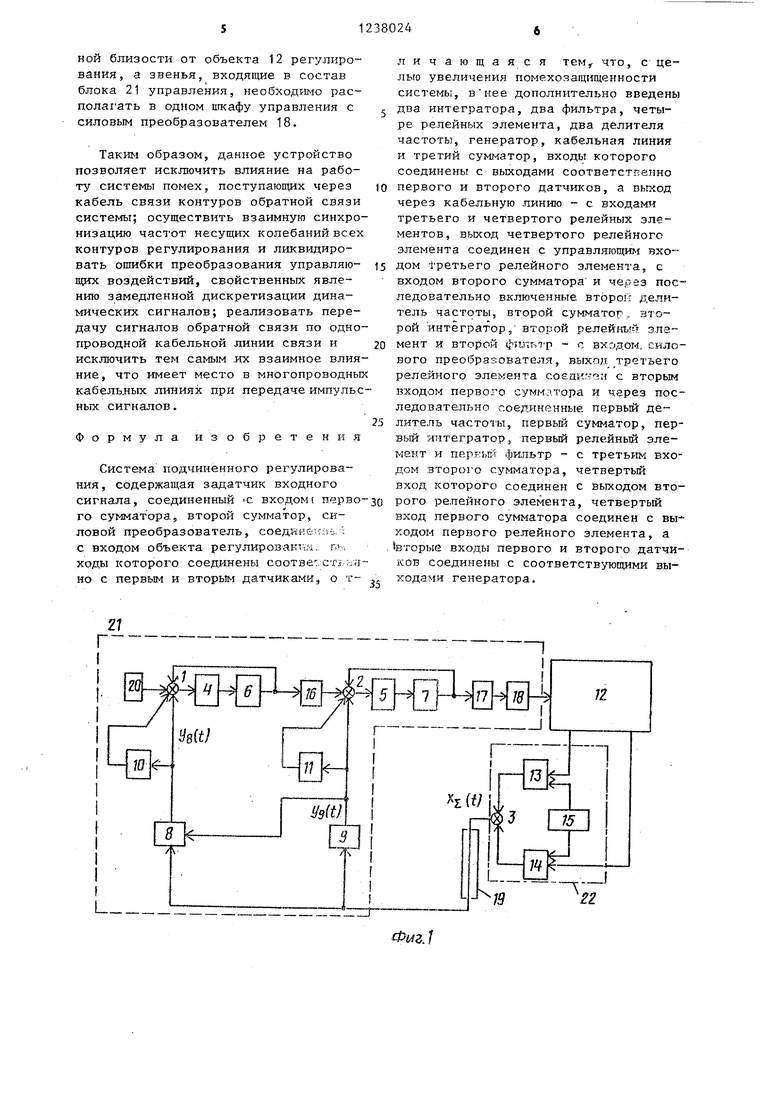
На фиг.1 представлена функциональная схема системы подчиненного регулирования .
Указанная схема содержит первьй 1, второй 2 и третий 3 сумматоры, первый . 4 и второй 5 интеграторы, первый 6, второй 7, третий 8 и четвертьй 9 релейные элементы, первьй 10 и второй 11 делители частоты, объект-12 регулирования, первьй 13 и второй 14 датчики, генератор 15, первый 16 и второй 17 фильтры, силовой преобразователь 18, кабел;ьнуга линию 19 связи, задатчик 20, блок 21 управления и блок 22 датчиков.
Первый 6 и второй 7 релейные элементы выполнены с симметричньми относительно нуля порогами переключения неинвертирующей характеристикой. Четвертый 9 релейный элемент выполнен с нулевьп значение порогов переключения и неинвертирующей характеристикой. Первый 0 и второй 11 делители частоты имеют коэф(|}ициент де- , ления 2, а их вьгходной сигнал меняется дискретно в пределах,А. Силовой преобразователь 18 вьтолняет функции широтно-импульсного усилите- , ля мощности для питания объекта 12 регулирования. Третий 8 релейный эле- мент имеет два входа: информационный, подключенный к выходу кабельной линии 19, и установоч1л.1й, соединенный . с выходом четвертого 9 релейного элемента.
Наличие импульса на выходе четвертого 9 релейного элемента приводит к
10
15
20
25
3035
40
Устройство работает следующим образом.
При отсутствии сигнала задания на входе сумматора 1 первый релейньиЧ элемент 6, имеющий симметричные относительно нулевого уровня пороги пере- кл Очения1В , совершает цикл перекл о- чений, при котором среднее значение его выходного сигнала равно нулю. Сигнал ita выходе первого интегратора 4 1-гмеет форму симмеричной пилы со средн:им за период Т нулевьпч значением постоянной составляющей.
Наличие сигнала на входе первого сумматора 1 приводит к изменению скважности импульсов на выходе первого релейного элемента 6. В одни из по1гупериодов автоколебаний темп нарастания развертки определяется разностью входного и выходного сигналов автоколебательного каскада, а в другой полупериод зависит от суммы этих сигналов, В результате за период автоколебаний постоянная составляющая выходного сигнала первого -релейного элемента 6 устанавливается пропорциональной уровню воздействия на входе . первого сумматора 1. Принцип действия сле.цующего тракта аналогичен указанному.
Задатчик 20 входного сигнала определяет темп разгона (торможения) объекта 12 регулирования.
Первый 16 и второй 17 фильтры предназначены для подавления несущих колебаний соответствующих каскадов системы,.
С помощ,ью первого 13 и второго 14 датчиков происходит потенциальное
разделение, усиление и преобразование в широтно-импульсный сигнал регулиру- координат объекта 12 регулирования. При этом первый 13 выполняет функции датчика тока, а вто- смещению порогов пере:|слгочения третье- , ,
-- - рои 14 датчик - функции датчика ского 8 релейного.элемента на величину, пропорциональную амплитуде сигнала на установочном входе.
«
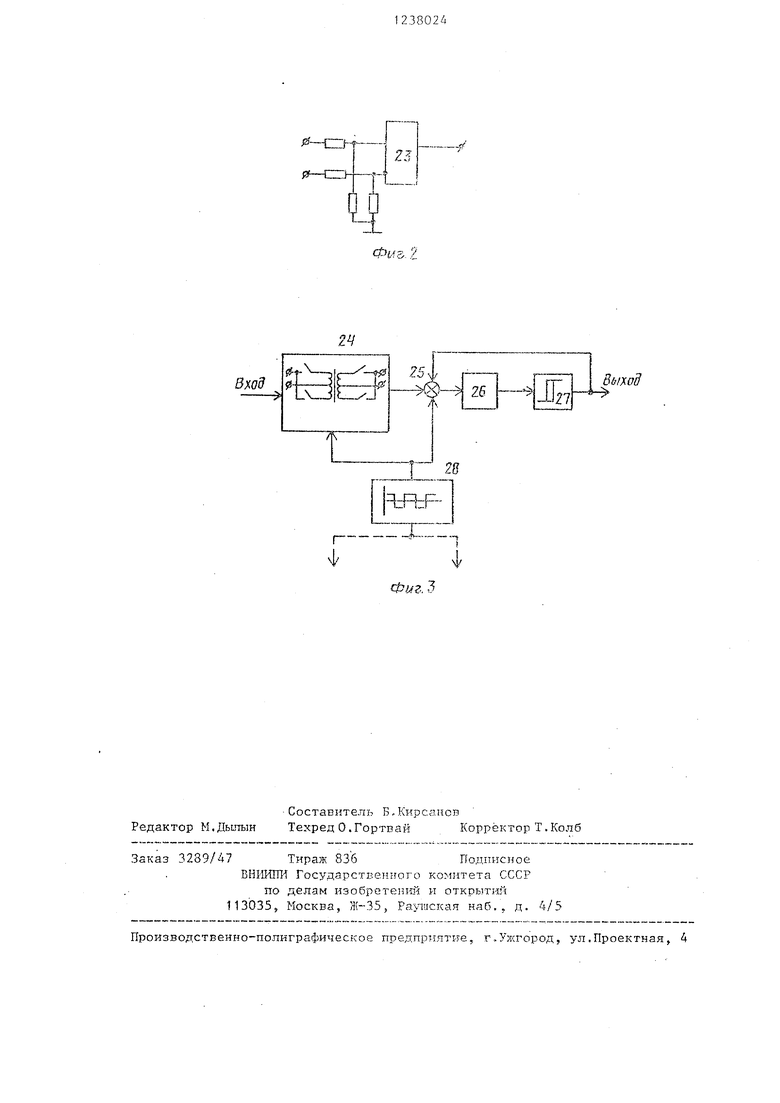
На фиг.2 приведен пример реализации третьего 8 релейного элем,ента, где 23 - операционный усилитель., а пример реализации первого 13 и второго 14 датчиков показан на фиг.З,
Каждый датчик содержит блок 24 модулятор - демодулятор, сумматор 25, интегратор 26, релейный элемент 27 и генератор 28 несущей частоты.
50
рости объекта 12 регулирования.
Генератор 15 слулдат для формирования сигналов несущей частоты и имеет два выхода, сигналы которых синхронизированы, идентичны по форме (сигнал типа меандра), но отличаются по частоте, В дальнейшем полагаем, что частота несу1д(их колебаний второго датчика 14 превьпцает частоту несущих коле- 55 баний первого датчика 13,
Кроме того, на амплиту у выходных сигналов первого 13 и второго 14 датчиков накладывается ограничение, зак
Устройство работает следующим образом.
При отсутствии сигнала задания на входе сумматора 1 первый релейньиЧ элемент 6, имеющий симметричные относительно нулевого уровня пороги пере- кл Очения1В , совершает цикл перекл о- чений, при котором среднее значение его выходного сигнала равно нулю. Сигнал ita выходе первого интегратора 4 1-гмеет форму симмеричной пилы со средн:им за период Т нулевьпч значением постоянной составляющей.
Наличие сигнала на входе первого сумматора 1 приводит к изменению скважности импульсов на выходе первого релейного элемента 6. В одни из по1гупериодов автоколебаний темп нарастания развертки определяется разностью входного и выходного сигналов автоколебательного каскада, а в другой полупериод зависит от суммы этих сигналов, В результате за период автоколебаний постоянная составляющая выходного сигнала первого -релейного элемента 6 устанавливается пропорциональной уровню воздействия на входе . первого сумматора 1. Принцип действия сле.цующего тракта аналогичен указанному.
Задатчик 20 входного сигнала определяет темп разгона (торможения) объекта 12 регулирования.
Первый 16 и второй 17 фильтры предназначены для подавления несущих колебаний соответствующих каскадов системы,.
С помощ,ью первого 13 и второго 14 датчиков происходит потенциальное
разделение, усиление и преобразование в широтно-импульсный сигнал регулиру- координат объекта 12 регулирования. При этом первый 13 выполняет функции датчика тока, а вто- ,
рости объекта 12 регулирования.
Генератор 15 слулдат для формирования сигналов несущей частоты и имеет два выхода, сигналы которых синхронизированы, идентичны по форме (сигнал типа меандра), но отличаются по частоте, В дальнейшем полагаем, что частота несу1д(их колебаний второго датчика 14 превьпцает частоту несущих коле- баний первого датчика 13,
Кроме того, на амплиту у выходных сигналов первого 13 и второго 14 датчиков накладывается ограничение, заключшощееся в том, что амплитуда выходного сигнала второго датчика 14 должна быть меньше амплитуды выходного сигнала первого датчика 13 (минимум в два раза). -5
При отсутствии сигнала на выходе объекта 12 регулирования постоянная составляющая импульсов на выходе первого 13 и второго 14 датчиков равна нулю. Наличие сигнала на выходе объ- fo екта 12 регулирования влечет за собой изменение скважности импульсов на выходе первого 13 и второго 14 датчиков. На вход однопроводной кабельной линии 19 подается выходной широтно- t5 импульсный сигнал первого датчика 13, модулированный по амплитуде выходным широтно-импульсным сигналом второго датчика 14. Четвертый 9 релейный элемент имеет нулевое значение порогов 20 переключения, а его выходной сигнал не изменяется по амплитуде и меняется только по знаку. Переключение четвертого 9 релейного элемента осуществляется сигналом с выхода третьего 3 25 сумматора X(t) в моменты времени изменения его знаков. В результате на выходе четвертого 9 релейного элемента формируется сигнал YaCt), который полностью повторяет форму выход- JQ
Hoiro сигнала первого 13 датчика. I
Третий 8 релейный элемент в исходном состоянии имеет нулевой уровень порогов переключения. Его информационный вход подключен к выхрду третье-35 го 3 сумматора, а установочньш вход - к выходу четвертого 9 релейного элемента. Под действием импульсов Y,,(t) пороговый уровень с третьего 8 релейного элемента смещается на величину, 0 соответствующую амплитуде сигнала YoCt), что обеспечивает возможность управления моментами переключения третьего 8 релейного элемента.
Таким образом, в предлагаемой сис-45 теме передача сигналов обратной свя- ,зи осуществляется по одному проводу кабеля связи, а их разделение на составляющие производится с помощью третьего 8 и четвертого 9 релейных эле- 50 ментов. Это позволяет уменьшить экономическое затраты при создании системы путем сокра1{1ения числа прйводников кабельной линии, а также полностью исключить влияние помех, наводимых 55 в контуре обратной связи. Введение, в устройство второго 8 и третьего 9 релейных элементов улучшает помехоустойчивость системы регулирования. Кроме того, передача выходных сигналов первого 13 и второго 14 датчиков по одном проводу приводит к тому, что оба полезных носителя информации подвергаются воздействию одного и того же по- мехового сигнала, что в значительной степени облегчает борьбу с ним и позволяет получить оптимальные характеристики системы.
Первый 10 и второй 11 делители частоты имеют идентичный принцип действия и функциональное назначение. Они предназначены для формирования сигнала несущей частоты автоколебательных каскадов системы, который синхронизирован с полезной составляющей сигналов обратных связей. Первый to и второй 11 делители частоты имеют одинаковые коэффициенты деления (2,0) и преобразуют выходные сигналы третьего 8, четвертого 9 релейных элементов в сигналы типа меандра со средним нулевым значением и периодом, в два раза превьппающим период выходных импульсов третьего 8 и четвертого 9 релейных элементов. С помощью выходных сигналов первого 10 и второго 11 делителей частоты автоколебательные каскады системы переводятся из режима колебаний с частотно-широтно-импульс- ной модуляцией в режим внептей синхронизации с постоянным периодом дискретизации выходных импульсов.
Введение в систему первого 10 и : второго 11 делителей частоты позволяет исключить ошибки замедленной дис- кретизйции автоколебательных каскадов, которые могут возникнуть в подобных системах в области малых значений сигналов управления, когда час- тотно-широтно-импульсная модуляция имеет свойства, близкие к показателям щиротно-импульснрй модуляции.
Кроме того, в предлагаемой системе сигналы несущей частоты всех контуров регулирования строго синхронизированы
В этих условиях оказывается принципиально невозможным появление ошибок замедленной дискретизации, свойственных системам с произвольно выбираемыми частотами несущих колебаний отдельных трактов СПР. Следователь7 но, система отличается повышенной помехоустойчивостью.
Для обеспечения высокой помехоустойчивости системы блок 22 датчиков должен располагаться в непосредственной близости от объекта 12 регулирования, а звенья, входящие в состав блока 21 управления, необходршо располагать в одном шкафу управления с силовым преобразователем 18.
Таким образом, данное устройство позволяет исключить влияние на работу системы помех, поступающих через кабель связи контуров обратной связи системы; осуществить взаимную синхронизацию частот несущих колебаний всех контуров регулирования и ликвидировать ошибки преобразования управляющих воздействий, свойственных явлению замедленной дискретизации динамических сигналов; реализовать передачу сигналов обратной связи по одно- проводной кабельной линии связи и исключить тем самым .их взаимное влияние, что имеет место в многопроводных кабель.ньгх: линиях при передаче импульсных сигналов.
Формула изобретения
сиСистема подчиненного регулирования, содержащая задатчик входного сигнала, соединенный С входом; перво го сумматора., второй сумматор, ловой преобразователь, соедине/ с входом объекта регулировак1чя ходы которого соединены соотве- но с первым и вторым датчиками, о т-
Г
21
o
5
0
5
о ,
лича. ющаяся тем что, с целью увеличения помехозащищенности системы, в нее дополнительно введены два интегратора, два фильтра, четыре релейных элемента, два делителя частоты, генератор, кабельная линия и третий сумматор, входы которого соединены с выходами соответственно первого и второго датчиков, а выход через кабельную линию - с входами третьего и четвертого релейных элементов, выход четвертого релейного элемента соединен с управляющим входом третьего релейного элемента, с входом второго сумматора и через последовательно включенные второй делитель частоты, второй сумматор... второй интегратор, второй релейньй элз- мент и второй ф1шь7 р - с входом, силового преобразователя, выход третьего релейного элемента соедн тТ ;н с вторым входом первого сумматора и через последовательно соединенные первый делитель частоты, первый сумматор, первый интегратор, первый релейный элемент и nepiibn-i фильтр - с третьим входом .второго сумматора, четвертый вход которого соединен с выходом второго релейного элемента, четвертый вход первого сумматора соединен с вы ходом первого релейного элемента, а вторые входы первого и второго датчиков соединены с соответствующими выходами генератора.
. /
.(
Фб.5, У

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1982 |
|
SU1166055A1 |
| Развертывающий операционный усилитель | 1983 |
|
SU1091178A1 |
| Система управления | 1984 |
|
SU1242909A1 |
| Система управления | 1983 |
|
SU1167578A1 |
| Развертывающий автоколебательный операционный усилитель | 1980 |
|
SU862149A1 |
| МНОГОЗОННЫЙ РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПЕРЕДАЧИ ЛОГИЧЕСКИХ ДАННЫХ ПО ОДНОПРОВОДНОЙ ЛИНИИ СВЯЗИ | 2001 |
|
RU2206922C2 |
| МНОГОЗОННЫЙ ЧАСТОТНО-ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2461875C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2008 |
|
RU2383985C1 |
| Система автоматического управления | 1984 |
|
SU1249490A1 |
| ДАТЧИК НУЛЕВОГО ТОКА | 2009 |
|
RU2390906C1 |
Изобретение относится к области автоматизации процессов управления электроприводом и предназначено для автоматизации технологических процессов. Целью изобретения является повышение помехозащищенности системы подчиненного регулирования. Система содержит три сумматора, два интегратора, четыре релейных элемента, два делителя частоты, объект регулирования, два датчика, генератор, два фильтра, силовой преобразователь, кабельную линию связи, задатчик, блок управления и блок датч1-1ков.. Сущность изобретения заключается во взаимной cimxpo- низации частот несущих колебаний контуров регулиров ания, передаваемых по однопроводной кабельной линии связи, что увеличивает помехозащищенность системы подчиненног о регулирования. 3 ил. Is5 Од 00 о ю
Вход
Вшо
| Система управления | 1979 |
|
SU842722A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Гарнов В.К | |||
| и др | |||
| Унифицированные системы автоуправления в металлургии, М.: Металлургия, 1971, с.10 рис.1 д. | |||
