Изобретение относится к электро- приводам и может использоваться при автоматизсщии технологических процессов. .
Цель из обретения - повьшение надежности системы управления.
На фиг. I показана функциональная схема предлагаемого устройства; на фиг.2 и 3 - диаграммы его сиг налов., i
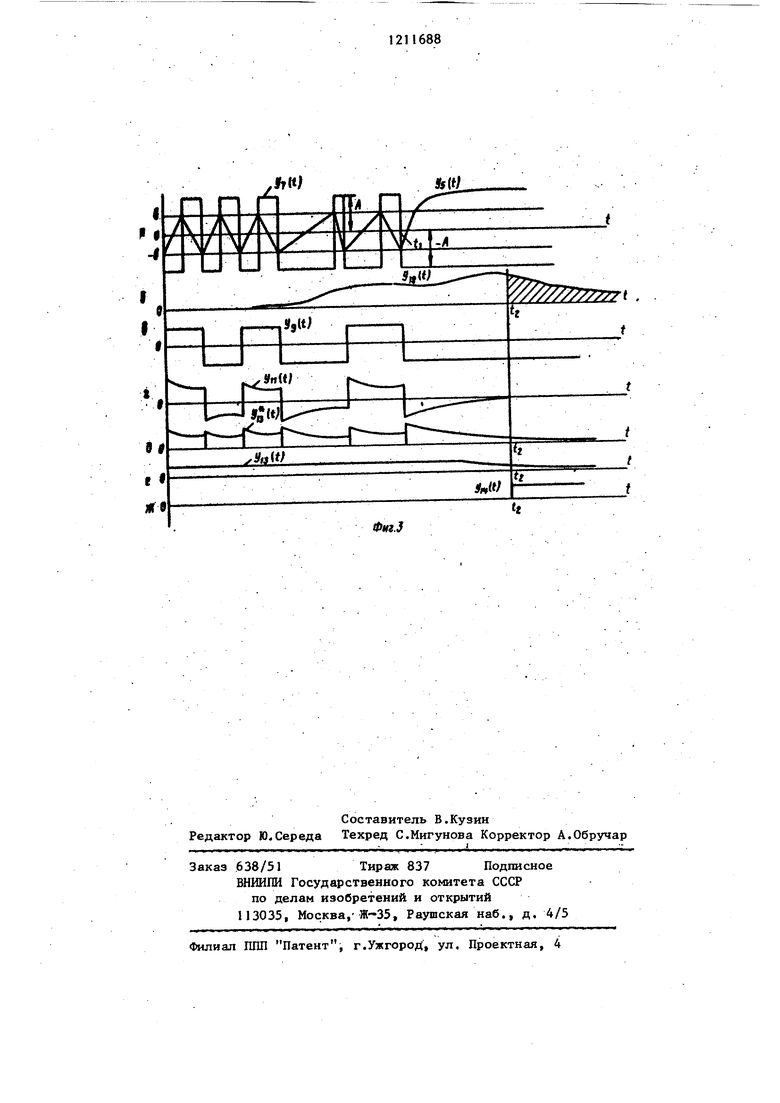
В состав устройства (фиг.О входят источник 1 зада1с1цего сигнала ( задатчик ускорения), первый 2 и второй 3 сумматоры, первый 4 и второй 5 интеграторы, 6 и второй 7 релейные элементы, первый 8 и второй 9 делители частоты, первый 10 и второй 11 пропорцио- напьнсг-дифференцирукяцие регуляторы, первый 12 и второй 13 демодуляторы,- блок 14 логической функций 2 И-41Е, демодулирующие фильтры 15 и 16, первый 17 и второй 18 ключевые элементы, фильтр 19 с резисторами 20 и 21 и конденсатором 22, вентильный преобразователь 23, исполнительный электродвигатель 24, датчики 25 тока и напряжения 26, тахогене- ратор 27. Кроме, того, на фиг. 1-3 введены следующие обозначения: xy(t) - выходной сигнал блока 1; ) - выходной сигнал блока 26; у (t) - выходной сигнал релейного, элемента 6; Ул(1) - выходной сигнал интегратора 4; Уд() выходной сигнал делителя 8 частоты; y.{,(t) - выходной сигнал блока 10; y.j(t) - напряжение на выходе блока 12 (y(t) сигнал при наличии в блоке 12 демодулирующего фильтра.; () выходной сигнал фильтра 19; y,ij(t) - напряжение на выходе блока 14 2И-НЕ t - момент времени возникновения в системе автоматического управлени (САУ) неисправности; t. - момент времени отклика САУ на неисправность регулятора; Т - период автоколебаний развертывакщего операционного усилителя; /А - амплитуда выходных импульсов усилителя.
Источник 1 предназначен для формирования требуемого закона разгона (торможения) двигателя 24 и имеет передаточную функцию вида W(p) , где Т., - постоянная времени.
Сумматоры 2 и 3 выполнены с коэф фициентом передачи Кп IjO, Пере-
88
даточная функция интеграторов 4 и 5: W;,) VTp
Релейные элементы 6 и 7 имеют неинвертирующую петлю гистерезиса и пороги переключения 16 . Выходной сигнал элемента 6 и 7 неизменен по модулю амплитуды и может дискретно меняться по знаку в преде- лах ± А.
Делители частоты 8 и 9 выполиены с коэффихщентом деления 2,0. Регу- яторы 10 и 11 реализуют передаточную функцию Wio,,i(p) - Tjp/ (Tjptl)). Демодуляторы 12 и 13 имеют функцию преобразования вида
y,,{t) K/y.t) ,
где (t) - выходной сигнал демоду- лятора; y(j(t) - входной сигнал демодулятора; К- коэффициент передачи демодулятора..
Фильтры 15 и 16 предназначены для выделения полезной составляющей выходного сигнала развертывающего операционного усилителя (РОУ) и имеют передаточную функцию, например, апериолического звена первого порядка
W,s,i6(p) 1/( 1). Ключи 17 и 18 переходят в состо- , яние, противоположное показанному на фиг.1, при наличии на выходе блока 14 сигнала логической 1.
.Фильтр 19 выполнен на пассивных R-C компонентах 20-22 и реализует передаточную функцию, фида ,i6 (р)
Вентильный преобразователь 23 служит для питания якорной цепи двигателя 24. Датчик 25 тока предназначен для преобразования тока якорной цепи двигателя 24 в электрический сигнал заданной мощности. Передаточная функция датчика 25 тока , W2s(p) К/(Тг5р ), где Tjis - малая постоянная времени блока 25, которая в диапазоне рабочих частот САУ может не учитываться. Блоки 26 и 27 в совокупности образуют контур обратной связи. САУ по скорости двигателя 24. Блок 26 имеет характеристику, аналогичную характеристике звена 25.
Система работает следующим образом.
Блок 14 определяет темп разгона и торможения двигателя,-Регуляторы САУ выполнены на основе РОУ (р азвер бывающих операционных усилителей).
312
В состав первого усилителя входят блоки 2,4 и 6, а .второй включает в себя звенья 3, 5 и 7. Принцип действия первого и второго усилителей идентичен, а поэтому ограничимся рассмотрением развертывакщего усилителя, состоящего из звеньев 2, А и 6.
Усилитель (2, 4 и 6) представляет собой автоколебательную систему с частотно-широтно-импульсной модуляцией. Релейные элемент 6 имеет симметричные отнсЗсительно нуля САУ пороги переключения ±В.Выходной сигнал блока 6 меняется дискретно в пределах ±А.
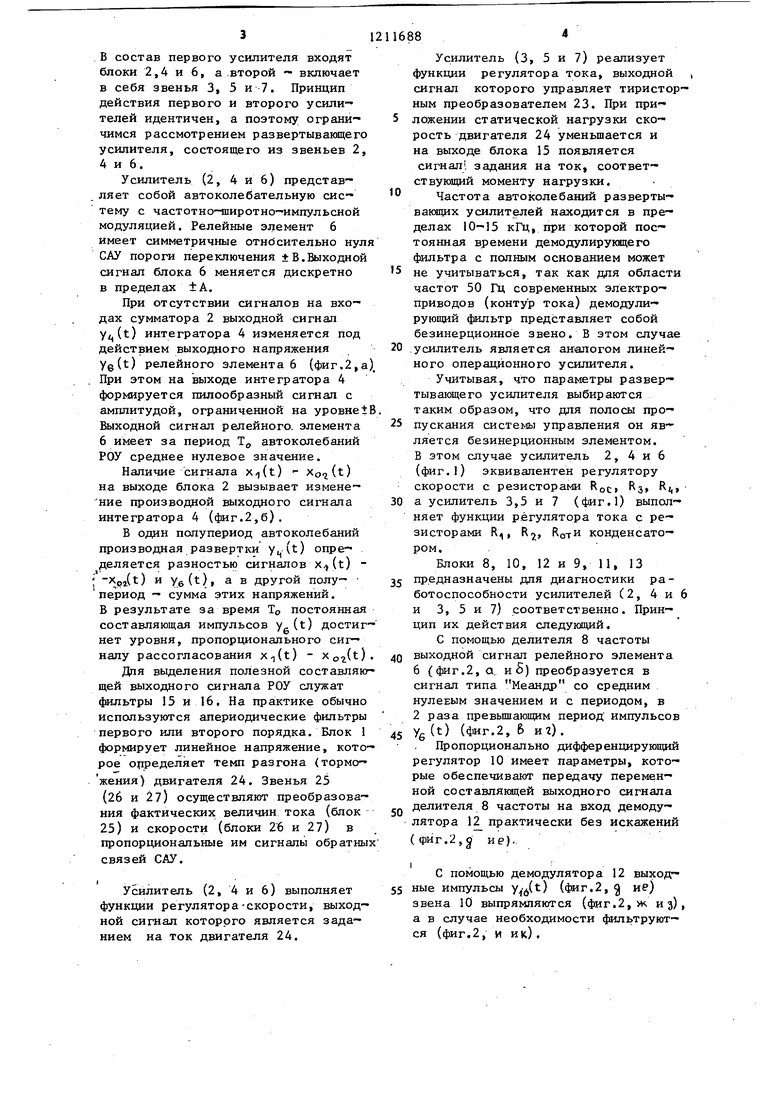
При отсутствии сигналов на входах сумматора 2 выходной сигнал yi,(t) интегратора 4 изменяется под действием выходного напряжения Уе() релейного элемента 6 (фиг.2,а) При этом на выходе интегратора 4 формируется пилообразный сигнал с амплитудой, ограниченной на уровне1В. Выходной сигнал релейного, элемента 6 имеет за период Т автоколебаний РОУ среднее нулевое значение.
Наличие сигнала x/)(t) - ХочС) на выходе блока 2 вызывает измене- ние производной выходного сигнала интегратора 4 (фиг.2,б).
В один полупериод автоколебаний производная развертки yi,(t) определяется разностью сигналов x(t) - (t) и YeCt), а в другой полу- период - сумма этих напряжений. В результате за время , постоянная составляющая импульсов VgCt) достиг- нет уровня, пропорционального сигналу рассогласования )(t) - ).
Для вьщеления полезной составляющей выходного сигнала РОУ служат фильтры 15 и 16, На практике обычно используются апериодические фильтры первого или второго порядка. Блок 1 формирует линейное напряжение, котоое определяет темп разгона (тормо- женин) двигателя 24, Звенья 25 (26 и 2) осуществляют преобразования фактических величин тока (блок 25) и скорости (блоки 26 и 27) в пропорциональные им сигналы обратных связей САУ,
Усилитель (2, 4 и 6) выполняет функции регулятора-скорости, выходной сигнал которого является заданием на ток двигателя 24,
8
Усилитель (3, 5 и 7) реализует функции регулятора тока, выходной , сигнал которого управляет тиристор- ным преобразователем 23, При приложении статической нагрузки скорость двигателя 24 уменьшается и на выходе блока 15 появляется сигнал , задания на ток, соответствующий моменту нагрузки,
Частота автоколебаний развертывакяцих усилителей находится в пределах 10-15 кГц,при которой постоянная времени демодулирующего фильтра с основанием может
не учитываться, так как для области частот 50 Гц современных электроприводов (контур тока) демодули- рующий фильтр представляет собой безинерционное звено, В этом случае
.усилитель является аналогом линейного операционного усилителя.
Учитывая, что параметры развертывающего усилителя выбираются таким образом, что для полосы пропускания системы управления он яв- ляется безинерционным элементом, В этом случае усилитель 2, 4 и 6 (фиг.О эквивалентен регулятору скорости с резисторами ROC z
а усилитель 3,5 и 7 (фиг,1) выполняет функции р.ёгулятора тока с резисторами R,, Rr,, ROT конденсатором.
Блоки 8, 10, 12 и 9, 11, 13
предназначены для диагностики работоспособности усилителей (2, 4 и 6 и 3, 5 и 7) соответственно. Принцип их действия следукадий,
С помощью делителя 8 частоты
выходной сигнал релейного элемента 6 (фиг.2, а. и 5) преобразуется в сигнал типа Меандр со средним нулевым значением и с периодом, в 2 раза превышающим период импульсов
Уб (t) (фиг,2, 6 иг).
Пропорционально дифференцирующий регулятор 10 имеет параметры, которые обеспечивают передачу переменной составляклцей выходного сигнала делителя 8 частоты на вход демодулятора 12 практически без искажений (фйг,2, ие).
С помощью демодулятора 12 выход- ные импульсы (1) (фиг.2, ие)
звена 10 выпрямляются (фиг,2, ж из), а в случае необходимости фильтруются (фиг.2, и ик) ,
Относительно параметров демодули рующего фильтра, входящего в демо- дулятор 12 (13) необходимо отметить следующее.
Параметры фильтра зависят от тип ключа 17. Если последний представляет собой магнитоуправляемое или электромеханическое реле, то фильтр в блоках 12 и 13 отсутствует ввиду достаточно высокой инерционности ключевого элемента 17. В том случае когда ключ 17.выполнен на базе быстродействующего транзисторного ключа, способного реагировать на
кратковременные провалы напряжения при выпрямлении Меандр с выхода блока 10 (П), то целесообразно использовать пассивный апериодический RC-фильтр, постоянная времени которого, как показали экспериментальные исследования, составляют
не более 10
-1
где т„ - период
автоколебаний развертывающего усилителя при нулевом входном воздействии .
Принцип действия каскада, включающего звенья 9, 11 и 13 аналогичный рассмотренному.
Таким образом, в случае работо- способности усилителей 2, 4 и 6 и .3, 5, 7 на входах блока 14 И-НЕ формируются сигналы y,j(t), у,), 1, что обеспечивает на выходе звена 14 напряжение, уровень которого соответствует О. При этом выход релейного элемента 7 подкпкг- чен к входу преобразователя 15 чере нормально закрытый контакт ключа 17 (фиг.1).
Фильтр 19, выполненный на резисторах 20 и 2 и конденсаторе 22, введен в схему САУ для того, чтобы в случае ее неработоспособности обеспечить требуемый темп торможе- ВИЯ исполнительного электродвигателя 16.
В случае работоспособности регуляторов САУ иа конденсаторе 22
5
0 5
0
5
5
о Q
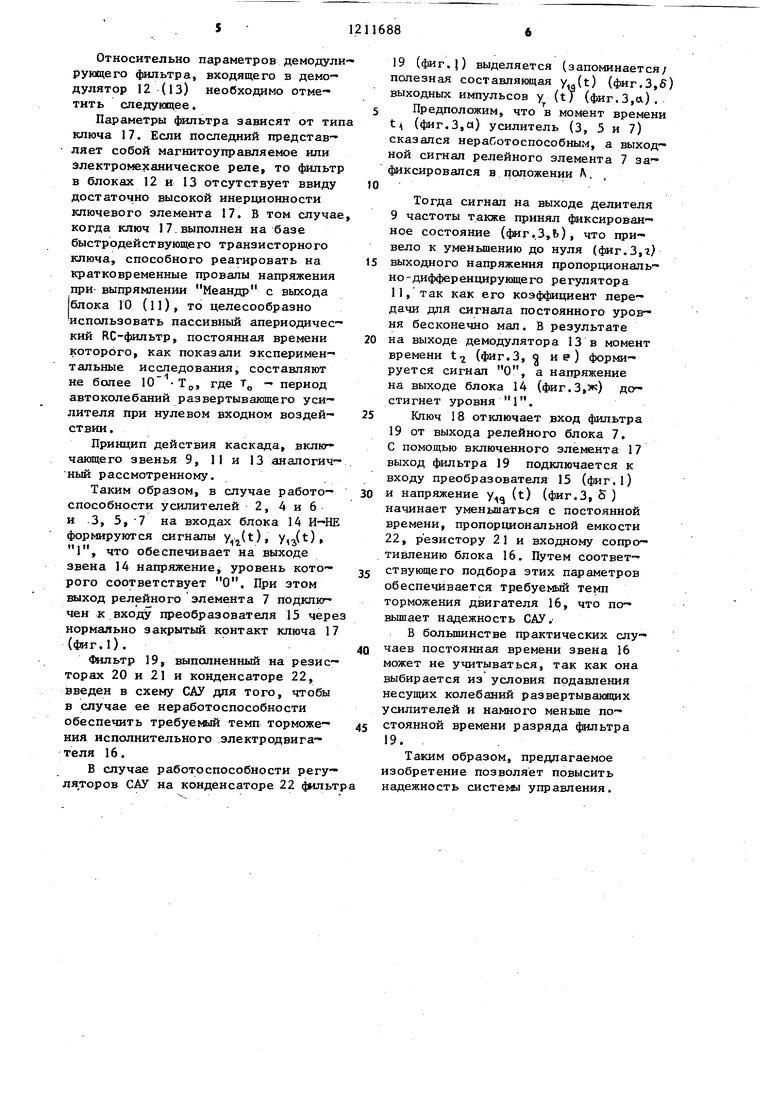
19 (фиг.) выделяется (запоминается/ полезная составляющая y(t) (фиг.3,б) выходных импульсов у (tf (фиг.3,а).
Предположим, что в момент времени t (фиг.3,а) усилитель (З, 5 и 7) сказался неработоспособным, а выходной сигнал релейного элемента 7 зафиксировался в положении А.
Тогда сигнал на выходе делителя 9 частоты также принял фиксированное состояние (фиг.,3,Ь), что привело к уменьщению до нуля (фиг.З,) выходного напряжения пропорционально-дифференцирующего регулятора 11, так как его коэффициент передачи для сигнала постоянного уровня бесконечно мал. В результате на выходе демодулятора 13 в момент времени t2 (фиг.З, ие) формируется сигнал О, а напряжение на выходе блока 14 (фиг.З,ж) дсг- стигнет уровня 1.
Ключ 18 отключает вход фильтра 19 от выхода релейного блока 7. С помощью включенного элемента 17 выход фильтра 19 подключается к входу преобразователя 15 (фиг,1) и напряжение (t) (фиг.З,5) начинает уменьшаться с постоянной времени, пропорциональной емкости 22, резистору 21 и входному сопротивлению блока 16. Путем соответствующего подбора этих параметров обеспечивается требуемый темп торможения двигателя 16, что по- вьшает надежность САУ.
В болыпинстве практических случаев постоянная времени звена 16 может ие учитываться, так как она выбирается из условия подавления несущих колебаний развертывакщих усилителей и намного меньше постоянной времени разряда фильтра 19.
Таким образом, предлагаемое изобретение позволяет повысить надежность систе Фл управления.
и„а)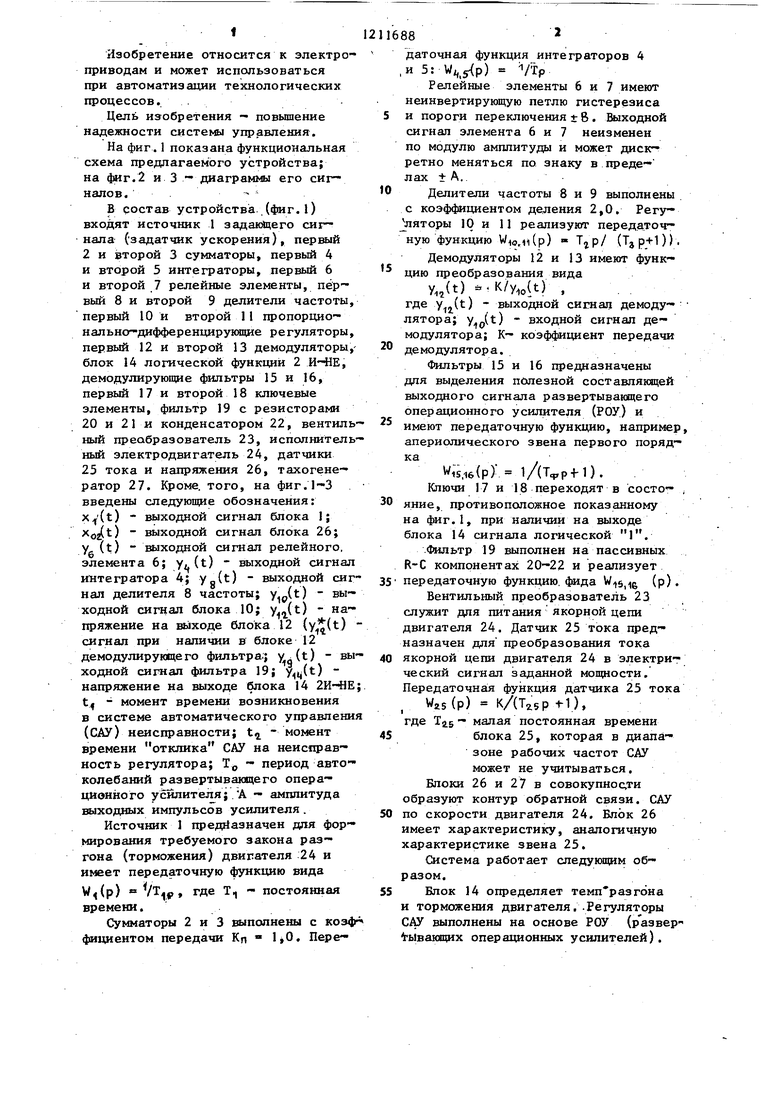
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1984 |
|
SU1249490A1 |
| ДАТЧИК НУЛЕВОГО ТОКА | 2009 |
|
RU2390906C1 |
| Устройство для контроля системы управления электроприводом | 1985 |
|
SU1273886A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2003 |
|
RU2251206C2 |
| Система автоматического управления | 1980 |
|
SU1008697A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2008 |
|
RU2383985C1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2471282C1 |
| УСТРОЙСТВО ДЛЯ ПОТЕНЦИАЛЬНОГО РАЗДЕЛЕНИЯ ЦЕПЕЙ ПОСТОЯННОГО ТОКА | 2011 |
|
RU2469392C1 |
| СИСТЕМА ИМПУЛЬСНО-ФАЗОВОГО УПРАВЛЕНИЯ | 2003 |
|
RU2248659C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2006 |
|
RU2312452C1 |
ФН2.2
Фчг.З
| Гарнов В.К | |||
| и др | |||
| Унифицированные системы автоуправления электр оприводом в металлургии | |||
| М.: Металлургия, 1977, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Система управления | 1979 |
|
SU842722A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
