1
Изобретение относится к частотноуправляемым электроприводам и может быть использовано в системах различного назначения (транспортных и буровых установках, станках и др.)
Известен частотно- управляемый электропривод с асинхронной машиной, в котором осуществляется стабилизация .магнитного потока в воздушном зазоре на определенном уровне l . Недостатком такого электропривода являются невысокие энергетические показатели из-за отсутствия коррекции стабилизируемого магнитного потока в зависимости от режима работы, машины при изменениях и скорости.
Известен также электропривод, который является наиболее близким по технической сущности и достигаемому ре- зультату к изобретению 2. Такой электропривод содержит вычислительное устройство, входы которого подключены к датчикам параметров машины ( к датчику частоты и электромагнитного момента) , а ВЫХОДЫ к устройству сравнения с эталонным сигналом. Вычислительное устройство формирует оптимальное по минимуму потерь двигателя значение потока, которое сравнивается с эталонным значением, а результат сравнения
используется для формирования сигналов управления преобразователем частоты. Недостатком известного электропривода является ограниченность решаемых задач из-за невозможности осуществления управления по любому критерию качества, например по минимуму тока статора, максимуму коэффициента мощности двигателя, минимуму суммарных потерь преобразователя частоты и двигателя и т.п.
Целью изобретения является расширение области решаемых задач и обеспечение в электроприводе с асинхронным двигателем оптимального по любому критерию качества режима работы путем поддержания оптимального потока в воздушном зазоре двигателя при выбранном критерии.
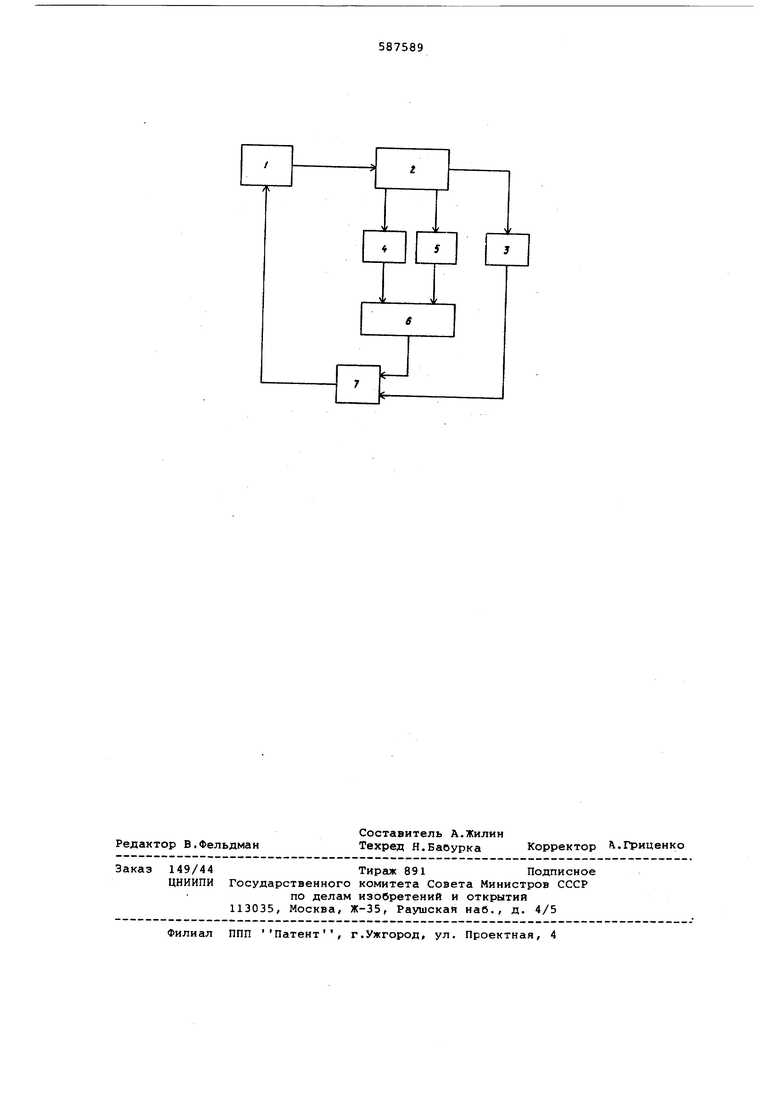
Указанная цель достигается тем, что в частотно- управляемый электропривод, содержащий асинхронный двигатель, преобразователь частоты, датчик магнитного потока вычислительное устройство, формирующее оптимальное значение потока в машине и подключенное выходом к устройству сравнения оптимал1гного значения магнитного потока с действительньам, введены датчики скорости и момента на валу, подключенные ко входам вы числительного устройства; Датчики пар метров машины и вычислительное устрой ство выполнены цифровыми. На чертеже представлена блок-схема предлагаемого частотно-управляемого электропривода., Электропривод содержит преобразователь частоты I, асинхронный двигатель 2, датчик магнитного потока 3 в воздушном зазоре асинхронного двигателя, цифровой датчик скорости 4, циф ровой датчик5 момента на валу, цифровое вычислительное устройство 6 и устройство сравнения 7. С цифровых датчиков скорости 4 и момента на валу 5 информация о скорос ти it и момента М на валу поступает в цифровое вычислительное устройство б, в котором запрограммированы уравнения математической модели частотно-управляемого электропривода (асинхронного двигателя и преобразователя частоты). Режим работы частотно-управляемого электропривода однозначно характеризуют три параметра: скорость п , момент М на валу и абсолютное скольжение ft, причем при фиксированных и и Л/1 лишь единственное значение ft обеспечивает . оптимальный по заданному критерию качества режим работы частотно-управляемого электропривода. Получив информацию опи М/цифровое вычислительное устройство 6 перебирает ряд значений /3 в достаточно широком диапазоне его изменения и для каждой совокупности значений ц, М и р вычисляют величину заданного критерия качества (например/ суммарных потерь частотно-управляемого электропривода) после чего из множества значений /} выбирает такое значение Р котором обеспечивается экстремальная величина заданного критерия качества) например, миниминизируется суммарные потери частотно-управляемого электропривода) , и вычисляется значение магнитно го потока в воздушном зазоре асинхронного двигателя соответствующее данным значениям п , М и /3. Сигнал на выходе цифрового вычислительного устройства 6, пропорциональныйфдп , сравнивается в устройстве сравнения 7 с сигналом, полученным с выхода датчика 3 магнитного потока и пропорциональным действительному значению магнитного потока Ф. Сигнал с выхода устройства сравнения 7 -ДФ Фдпт-- Ф подается на вход преобразователя частоты 1, формируя на его выходе такое сочетание частоты и напряжения, при котором сигнал на выходе устройства сравнения 7 равен нулю. Таким образом, в зазоре асинхронного двигателя всегда поддерживается оптимальное по заданному критерию качества значение магнитного потока V, и эбеспечийаётся тем самым оптимальный режим работы и высокая технико-экономическая эффективность частотно-управляемого электропривода. Формула изобретения 1.Частотно-управляемый электропривод, содержащий асинхронный двигатель, преобразователь частоты, датчик магнитного потока асинхронного двигателя и вычислительное устройство, формирующее оптимальное значение магнитного потока асинхронного двигателя и подключенное выходом к устройству сравнения оптимального значения магнитного потока с действительным, отличающийся тем, что/ с целью обеспечения оптимального по любому критерию качества режима работы/ в него введены датчики скорости и момента на валу, подключенньге ко входам вычислительного устройства. 2.Электропривод по п.1, о т л и чающийся тем, что упомянутые датчики и вычислительное устройство выполнены цифровыми. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР, № 375744/ кл.Н 02 Р 7/42,1970. 2.Сандлер А.С., Сарбатов Р.С. Автоматическое частотное управление асинхронными двигателями , М., Энергия, 1974 с. 198.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2004 |
|
RU2301975C2 |
| Электропривод | 1985 |
|
SU1332427A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ И МАГНИТНЫМ ПОТОКОМ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2469459C1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| Способ активного гашения магнитного шума электродвигателя и устройство для его осуществления | 2021 |
|
RU2769972C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПРИ НЕСИНУСОИДАЛЬНОМ НАПРЯЖЕНИИ ПИТАНИЯ | 1996 |
|
RU2094941C1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |