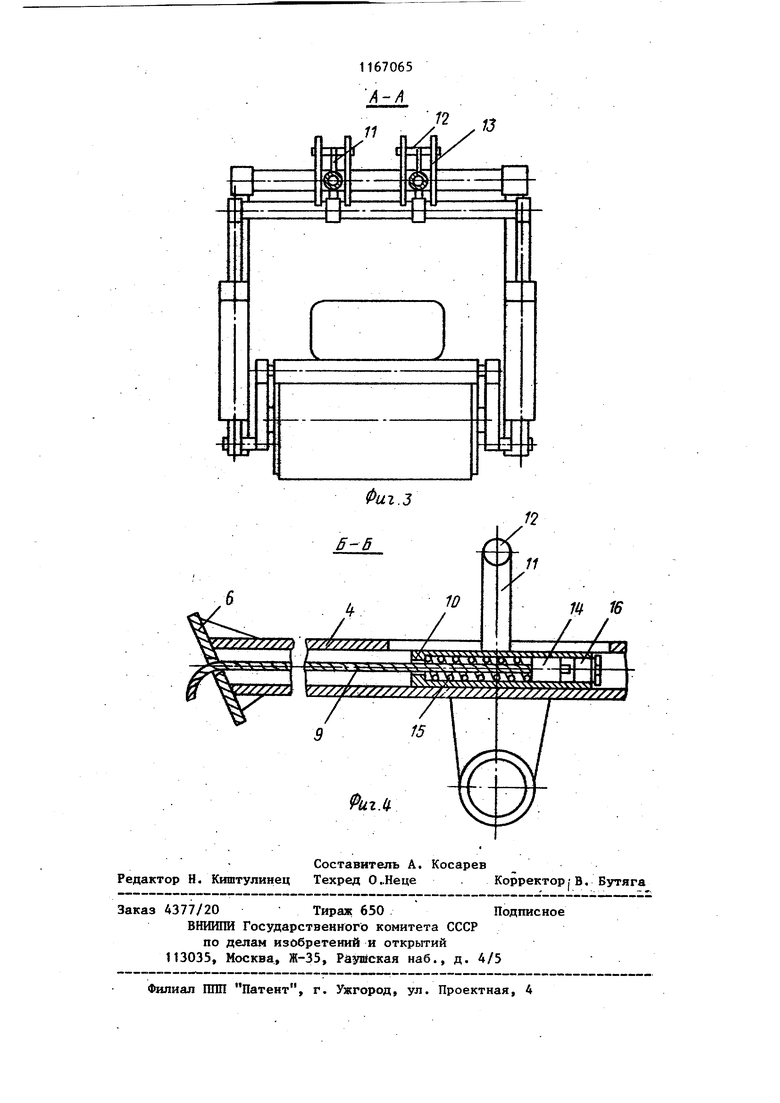
Устройство относится к транспорту, в частности к погрузочным устройствам, смонтированным на транспортных средствах. Цель изобретения - повьппение эффективности работы устройства за счет обеспечения возможности гарантированного ручного захвата груза и автоматического его раскрытия над транспортным средством. На фиг. 1 изображен погрузочный манипулятор, общий вид-, на фиг. 2 то же, вид сбоку, на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 разрез Б-Б на фиг. 2, Погрузочный манипулятор содержит установленный на раме 1 транспортного средства с возможностью поворота в продольной вертикальной плос кости портал 2, стойками которого я ляются гидроцилиндры 3. На верхних концах последних шарнирно закреплены продольные двуплечие балки 4. Поворот портала в гфодольной вертикальной плоскости осуществляется посредством гидроцилиндров 5. Одни концы балок 4 соединены поперечиной 6, а другие концы соединены с рамой 1 транспортного средства посредством тяг 7. Захват 8 соединен с порталом с помощьютросов 9, расположенных внутри балок 4 и прикреп ленных к гильзе 10. К гильзе прикре лен кронштейн 11, оси 12 которого 652 находятся в пазах стоек 13, прикрепленных жестко к поперечной балке портала. Внутри гильзы расположен подвижный поршень 14, к которому прикреплен трос, и пружина 15, а также крышка 16 с резьбовым соединением. На захвате 8 установлен чувствительный элемент (рычаг) 17. Манипулятор работает следующим образом. Погрузка груза на транспортное средство осуществляется путем изменения вылета и угла наклона портала 2 в сторону груза, работой гидроцилиндров 3 и 5. При этом наклонившаяся стойка 13 посредством кронштейна 11 перемещает гильзу 10 вперед в сторону груза, свободный конец троса 9 удлиняется и захват.8 саободно повисает рядом с грузом. Оператор осуществляет захват груза, прижав к нему захват и нажав на рычаг 17. Затем изменением наклона в обратном направлении гидроцилиндра 5 осуществляется перемещение груза к транспортному средству. При этом движением гильзы 10 в обратном направлении укорачивается свободный конец троса 9 и при касании . чувствительного элемента (рычага) 17 грузозахвата поперечины 6 производится автоматическое раскрытие захвата и освобождение груза над транспортным средством.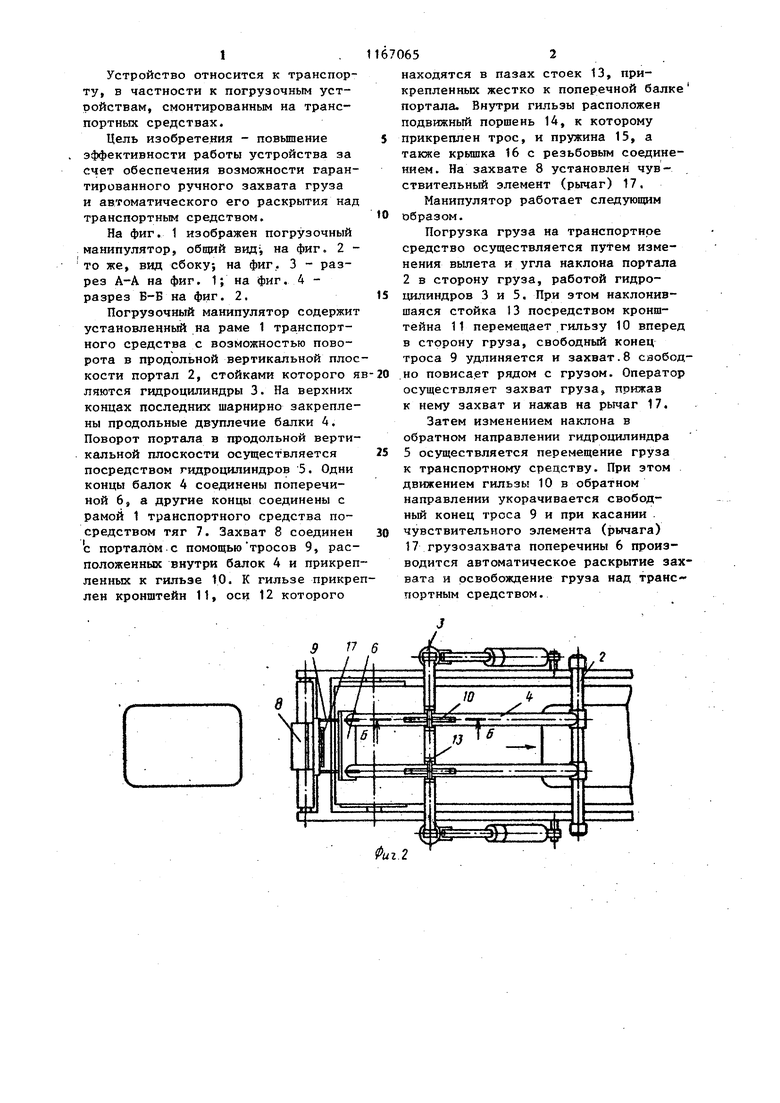
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для погрузки и разгрузки груза | 1987 |
|
SU1477590A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| ПОГРУЗЧИК ДВОРЯНИДОВА | 1990 |
|
RU2073634C1 |
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2139182C1 |
| КОНТЕЙНЕРОВОЗ | 1991 |
|
RU2022832C1 |
| Самопогрузчик | 1980 |
|
SU865205A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| Транспортное средство для перевозки длинномерных грузов | 1989 |
|
SU1668179A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ БУКСИРОВКИ АВАРИЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1991 |
|
RU2007309C1 |
ПОГРУЗОЧНЫЙ МАНИПУЛЯТОР, содержащий шарнирно установленный на раме транспортного средства с возможностью поворота в продольной вертикальной плоскости портал с поперечной балкой и стойками, выполненными в виде гидроцилиндров, на верхних концах которых шарнирно 8 П S 6 Л Ш Ш:-: -:закреплены продольные двуплечие балки, к одним плечам которых прикреплена поперечина, а другие свя- , заны с рамой транспортного средства шарнирными тягами, и захват, о тличающийся тем, что, с целью повыпения эффективности работы манипулятора, захват связан тросами с гильзами, CMOHTHpOBaHKbi ми с возможностью перемещения внутри продольных балок, при этом поперечная балка снабжена рычагами с пазами, .а гильэы - осями, расположенными в указанных пазах, причем захват снабжен элементом для его -расфиксаций, расположенным с возможностью взаимодействия с поперечиной. {,/ / 51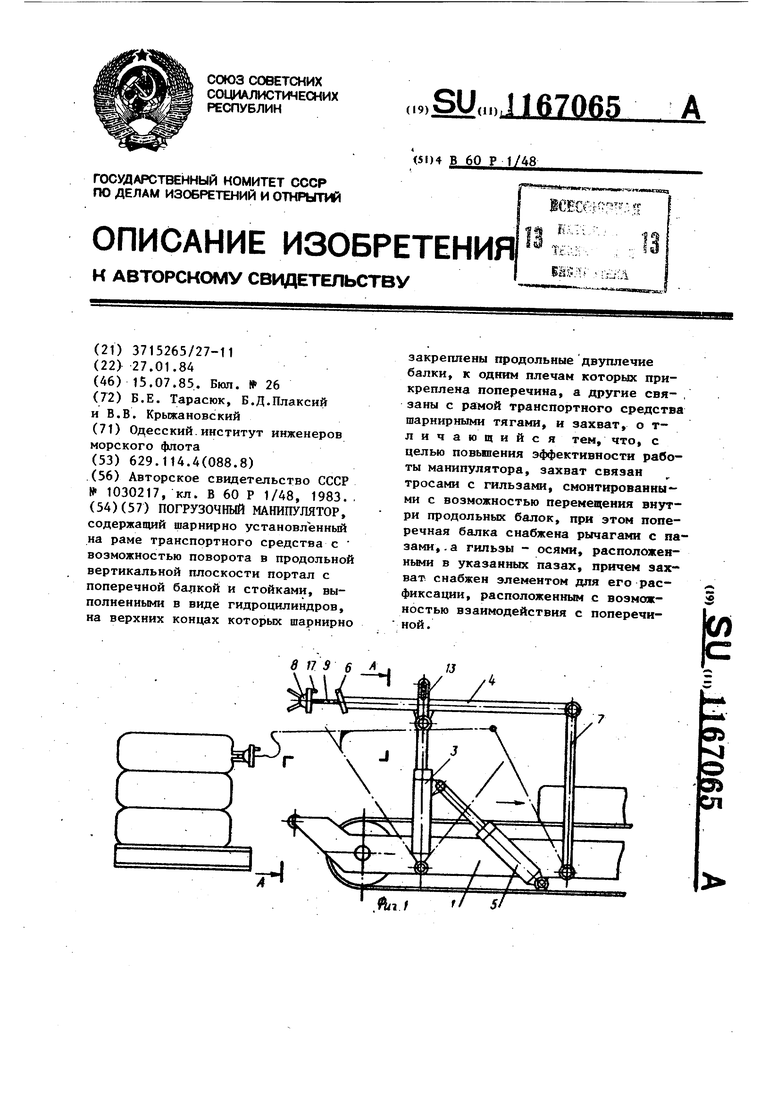
| Устройство для погрузки и разгрузки грузов | 1982 |
|
SU1030217A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
