блока распознавания метки, трет управляющий вход - к выходу блока распознавания метки и второму инфор мационному входу управляющего триггера, четвертый и пятый управляющий входы - соответственно к второму и третьему выходам блока счетчиков, выход которого подсоединен к управляющим входам первого и второго блоков распознавания метки, информационный вход первого блока распознавания метки соединен с выходом первого блока преобразования оптических сигналов в электрические дискретные сигналы и с первым Ш1формационным входом первого коммутатора, информационный вход второго блока распознавания метки соединен с выходом второго блока преобразования оптических сигналов в электрические дискретные сигналы и с вторьв4 информационным входом первого коммутатора, первый, второй и третгй выходы блока определения координат метки соединены соответственно с первым, вторым и третьим входами блока переключения, четвертый вход которого подклочен к выходу блока формирования задержки, первый и второй информационные входы второго коммутатора соединены соответственно с выходами блока переключения ц элемента задержки, управляющий вход блока запуска является запускающим входом устройства.
2.Устройство по п. 1, о т л ичающееся тем, что блок формирования задержки содержит т-1 вторых элементов задержки и m регистров сдвига, информационный вход первого из которых-соединен с информационным входом блока и входом первого элемента задержки, выход i-ro элемента задержки подключен к информационному входу соответствующего регистра рдвига и входу (i+1)-ro элемента задержки, тактовые входы регистров сдвига соединены с тактовым входом блока, выходы разрядов регистров сдвига являются выходом блока.
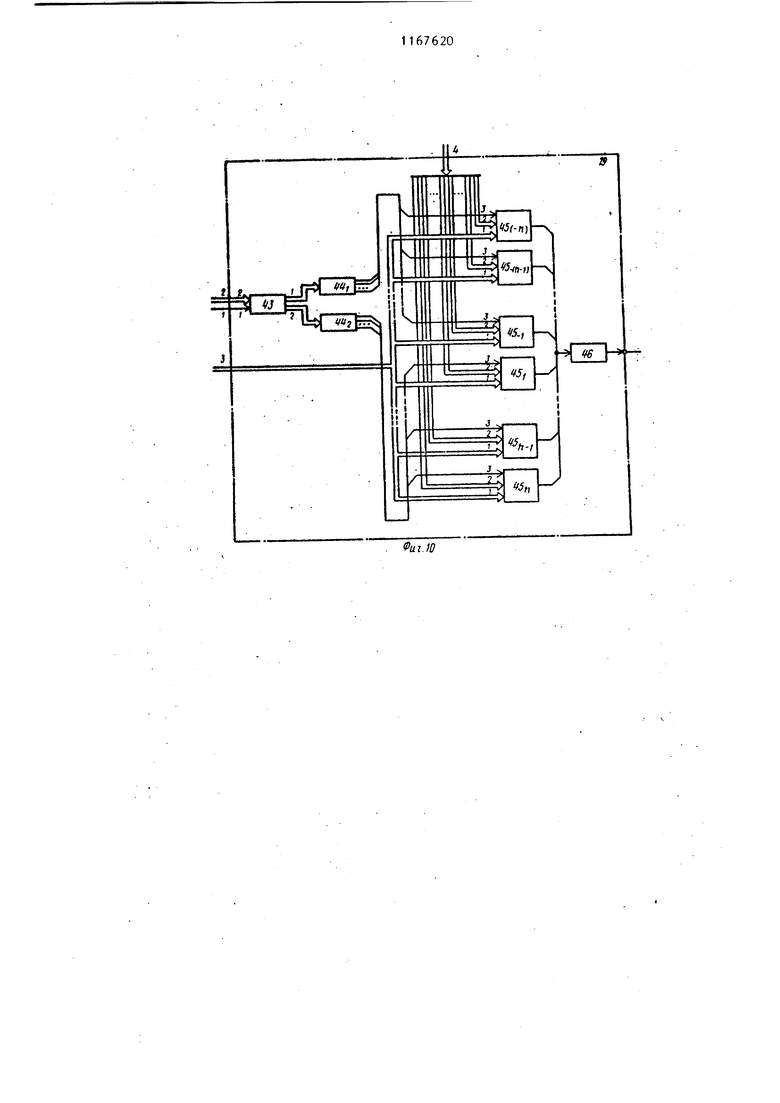
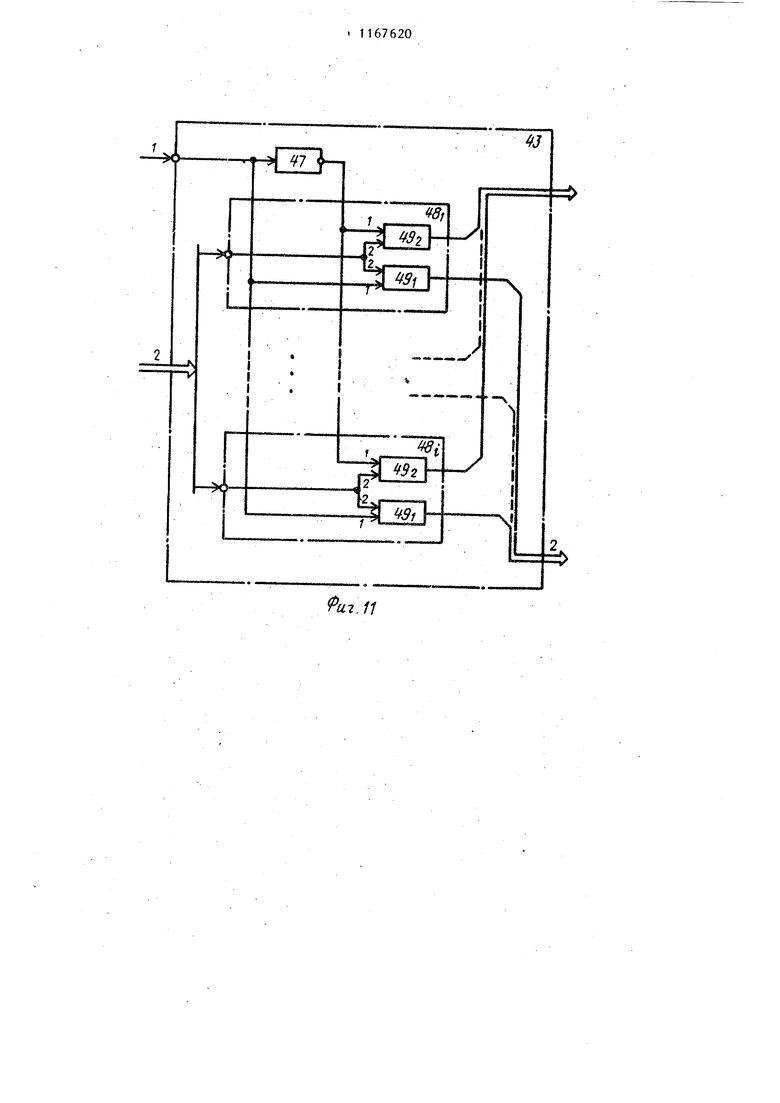
3.Устройство по п. 1, о т л ичающееся тем, что блок переключения содержит третий коммутатор, первый элемент ИЛИ, первый и второй дешифраторы, 2п четвертых коммутаторов, первые и вторые входы которых
соединены соответственно с третьим и четвертым, входами блока, третьи вхоф1 каждого из четвертых коммутаторов с первого по п подключены к соответствующим выходам первого дешифратора, третьи входы остальных четвертых коммутаторов - к соответствукнцим выходам второго дешифратора, входы первого и второго дешифраторов подсоединены соответственно к первым и вторым выходам третьего коммутатора, первый и второй входы которого соединены соответственно с первым и BTOpbw входом блока, выходы четвертых коммутаторов подключены к входам первого элемента ИЛИ, выход которого является выходом блокаi
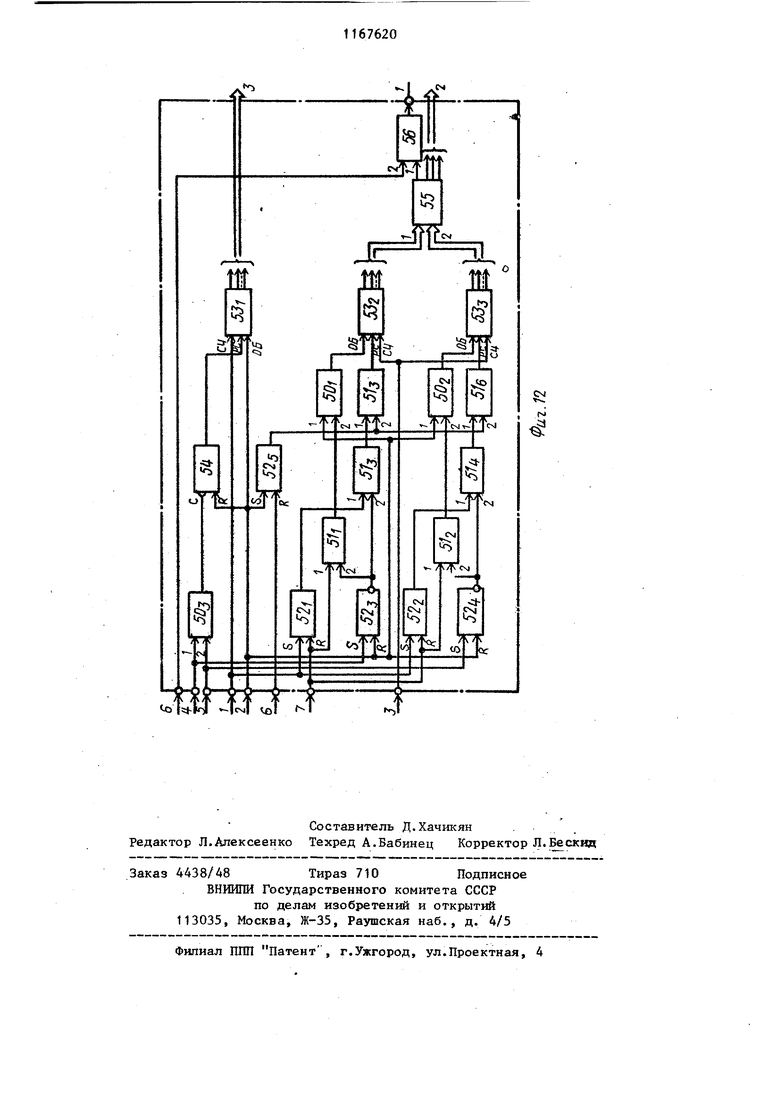
4. Устройство по п. 1, о т л ичающее ся тем, что блок определения координат метки содержит второй, третий и четнертьй элемент ИЛИ, с первого по шестой эле.менты И, с первого по пятый SR-триггеры, сумматор, первый, второй и третий счетчики Т-триггер, элемент ИСКЛОЧАЮЩЕЕ ИЛИ, первый вход которого подсоединен к знаковому разряду сумматора, первый и второй входы которого соединены соответственно с выходами второго и третьего счетчиков, входы сброса которых подключены соответственно к выходам второго и третьего элемента ИЛИ, входы разрешения счета - соответственно к выходам пятого и шестого элементов И, счетные входы - к второму счетному входу блока, второй вход элемента ИСКЛОЧАЮЩЕЕ ИЛИ соединен с первым управляющим входом блока, счетный вход первого счетчика подклочен к первому счетному входу блока, S-входам первого и второго SRтриггеров, вход разрешения счета к выходу Т-триггера, вход сброса к входу сброса блока, R-входу Т-триггера, S-входу пятого SR-триггера, R-входам третьего и четвертого SRтриггеров, первым входам второго и третьего элементов ШШ, вторые входы которых соединены соответственно с выходами первого и второго элементов И, первые входы которых подключены к R-входам первого и второго SR-триггеров и пятому управлякмцему входу блока, второй вход первого элемента И подключен к второму входу третьего элемента И и инверсному входу третьего SR-триггера, S-вход которого соединен с первым входом четвертого элемента ШШ и вторым управляющие входом блока, второй вход второго элемента И подключен к второму входу четвертого элемента И и инверсному выходу четвертого SR-триггера, S-вход которого соединен с вторым входом четвертого элемента ИЛИ и третьим управляющим входом блока, выходы первого и .второго SR-триггероэ подключены соответствен но к первым-входам третьего и четвертого элементов И, выходы которых соединены соответственно с первыми входами пятого и шестого элементов И, вторые входы которых подключены к выходу пятого SR-триггера, R-вход которого подключен к четвертому управляющему входу блока, вьпсод четвертого элемента ИЛИ подключен к С-входу Т-триггера, выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, разрядные выходы сумматора и первого счетчика являются соответственно первым, вторым и третьим выходами блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дефектоскопического контроля планарных структур | 1987 |
|
SU1460610A1 |
| Устройство для селекции изображений объектов | 1989 |
|
SU1777651A3 |
| Устройство для обработки видеоинформации | 1986 |
|
SU1322320A1 |
| Устройство дефектоскопического контроля планарных структур | 1988 |
|
SU1684597A1 |
| Устройство для ввода изображения в ЭВМ | 1988 |
|
SU1644402A1 |
| Устройство для распознавания контуров изображений | 1983 |
|
SU1156103A1 |
| Устройство для ввода информации | 1988 |
|
SU1536368A1 |
| Устройство для распознавания прямого края объекта | 1980 |
|
SU947882A1 |
| Устройство для вывода информации на экран электронно-лучевой трубки | 1985 |
|
SU1312560A1 |
| Устройство для считывания изображений | 1988 |
|
SU1614023A1 |
1. УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЛАНАРНЫХ СТРУКТУР, содержащее два оптических дефектоскопа, соединенные выходами с входами соответственно первого, и второго блоков преобразования оптических сигналов в электрические дискретные сигналы, к входам строчной и кадровой синхронизации которых подключены соответственно первый и второй выходы синхронизатора, блок сравнения,- выход которого соединен с первым входом блока индикации, второй вход которого подключен к перв8му входу блока сравнения, о т л и- чающееся тем, что, с целью повышения достоверности результатов контроля, в устройство введены первый и второй коммутаторы, управляющий триггер, первый и второй блоки распознавания метки, блок запуска, гене ратор тактовых импульсов, блок определения координат метки, первый элемент задержки, блок формирования задержки, блок переключения, блок счетчиков, первый счетный вход которого подключен к первому управляющему входу генератора тактовых импульсов, к первому счетному входу блока определения координат метки и к первому выходу синхронизатора, второй выход которого соединен с вторьм управляющим входом генератора тактовых импульсов и с информационным входом блока запуска, подключенного выходом к входу сброса управляющего триггера, второму счетному входу блока счетчиков и входу сброса блока определения координат метки, второй счетный вход которого соединен с тактовым входом . блока счетчиков, выходом генератора С тактовых импульсов, тактовым входом блока формирования задержки и первым , входом элемента задержки, второй вход которого подсоединен к первому выходу первого коммутатора, подключенного вторьм выходом к информационному входу бяока формирования задержки, первый и второй выходы второго коммутатора соединены соответственно с первым и вторым входами блока сравнения, первый и второй управляницие ю входы первого коммутатора соединены о соответственно с первым и вторым управляющими входами второго коьФ1утатора и с первым и вторым выходами управляющего триггера, второй выход управляющего триггера также соединен с первым управляющим входом блока определения координат метки, второй управляющий вход которого подключен к первому ршформационному входу управляющего триггера и выходу первого
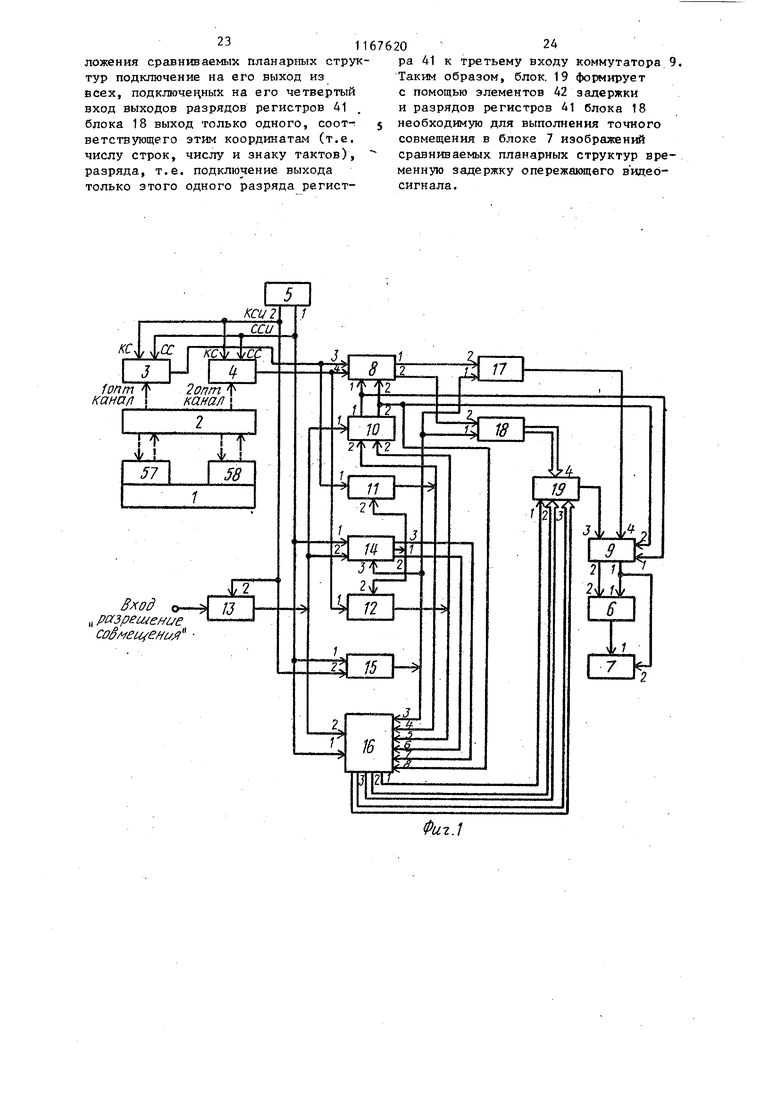
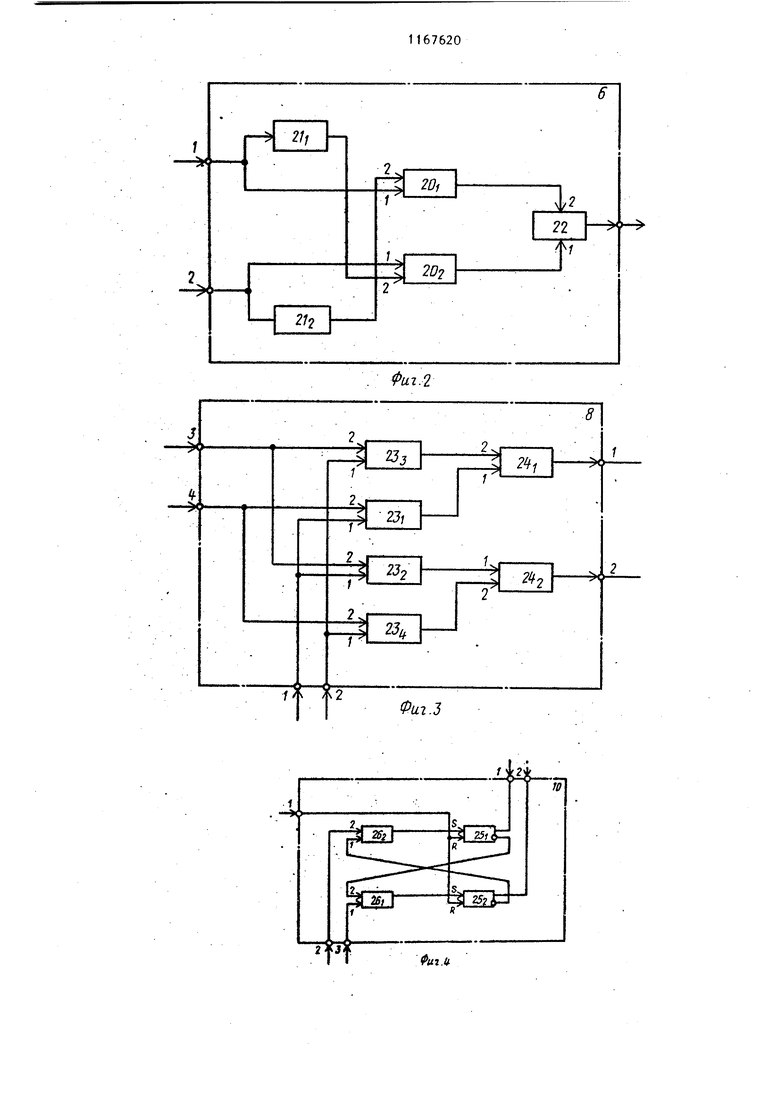
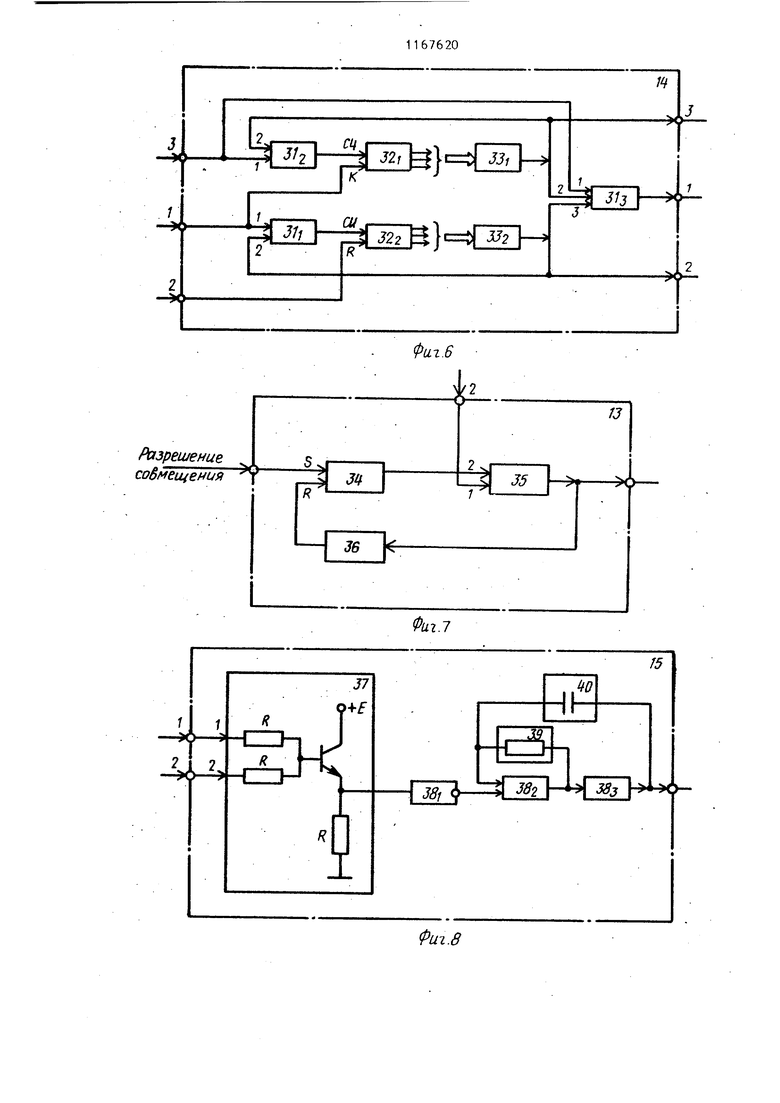
Изобретение относится к электронной технике и предназначено для контроля планарных структур, к которым относятся незагерметизированные дискретные и интегральные полупровод никовые структуры, толсто-пленочные платы гибридных интегральных микросхем, фотошаблоны. Цель изобретения - повьшение достоверности результатов контроля. На фиг. 1 представлена структурная схема предлагаемого устройства для контроля планарных структур; на фиг. 2 - структурная схема блока сравнения; на фиг. 3 - структурная схема первого (второго) коммутатора на фиг. 4 - структурная схема управ.лякицего триггера; на фиг. 5 - структурная схема первого (второго) блока распознования метки; на фиг. 6 структурная схема блока счетчиков; на фиг. 7 - структурная схема блока запуска; на фиг. 8 - ст1)уктурная схема генератора тактовых импульсов; на фиг. 9 - структурная схема блока формирования задержки; на фиг. 10 структурная схема блока переключения на фиг. 11 - структурная схема .треть его коммутатора; на фиг. 12 - структурная схема блока определения координат метки. Устройство содержит координатный стол 1, два оптических дефектоскопа 2, первый преобразователь 3 оптических сигналов в электрические дискретные сигналы, второй преобразователь 4 оптических сигналов в элект рические дискретные сигналы, синхронизатор 5, блок 6 сравнения, блок 7 индикации, первый коммутатор 8, второй коммутатор 9, управляющий триггер 10, первый блок 11 распознования метки, второй блок 12 распознавания метки, блок 13 запуска, блок 14 счетчиков , генератор 15 тактовых импульсов , блок 16 определения координат метки, элемент 17 задержки, блок 18 формирования задержки, блок 19 переключения, первая 20 I и вторая 20 | схемы совпадения, первый 21j -и второй 212 инверторы; элемент ИЛИ 22, элементы И с 23 по 23, элементы ИЛИ 24 И 242 ЗД-триггеры 25 и 25, элементы И 26| и 26, регистры с 27 по 27. сдвига, с 21 по 27j разряды соответствующих регистров сдвига, электронное окно 28, коммутационные поля 29( и 29, элементы И с 30, по 30, элементы И с 31 по 31„, первый 32( и второй 32 счетчики, дешифраторы 33f и 33, SR-триггер 34, элемент И 35, элемент 36 задержки, эмиттерный повторитель 37, инверторы с 38 по 38, резистор 39, конденсатор 40, регистры с 41 ( по 4lj сдвига, элементы с 421 по 42 .;| задержки, третий коммутатор 43, первый 44J и второй 44г коммутаторы, 2п четвертых коммутаторов 45, элемент ИЛИ 46, инвертор 47, информационные каналы с 48 по 48- , элементы И 49 и 49, второй 50, третий 50 2 и четвертый 50 элементы ИЛИ, с первого 51 по шестой 51 элементы И, с первого .52, по пятый 52 ; SR-триггеры, первьй 53f. второй 53jj и третий 53j счетчики, Т-триггер 54, сумматор 55, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 56, эталонная пленар ная структура 57, контролируемая планарная структура 58. В устройстве обеспечивается повы шение достоверности контроля за счет того, что достигается электронное и автоматическое предварительное совмещение изображений контролируемой и эталонной планарных структур. В предлагаемом устройстве контрол планарных структур для выполнения требуемого совмещения изображений сравниваемых структур используются имеющиеся на этих структурах техноло гические метки, т.е. в устройстве обеспечивается и контролируется точное совмещение изображений технологи ческих меток. Корректность такого подхода, т.е. использования для этой цели меток, определяется тем, что он наносятся одновременно с основным рисунком (в одном технологическом цикле, с использованием одних и тех же трафаретов, масок и т.п.), и поэтому координатЬ всей структуры могут быть идентифицированы -координатами метки. Целесообразность использования меток для этой цели, т.е. для осуществления автоматического предварительного с высокой точностью совмещения сравниваемых планарных структур для последукяцего дефектоскопического контроля на блоке индикации и включающего в себя распознавание структур, определение разности координат их взаимного положения и последующего электронного совмещения определяется простотой технической реализации в этом случае, что, в свою очередь, определяется такими преимуществами меток, как четкий ипро той геометрический рисунок (как правило, прямолинейный контур), небольшие (по отношению к основному рисунку) размеры и то, что метки отделены от основного рнсут1ка (т.е. могут быть легко вьщелены),. Устройство работает следующим образом. Сравниваемые планарные Структуры 57 и 58 устанавливаются на коорди натный стол 1 и фиксируются. Увеличенные с помощью дефектоскопов 2 изображения контролируемой и эталонной планарных структур проецируются на мишени видиконов соответствующих преобразователей 3 и 4, в которых происходит квантование, кодирование и фильтрация сигналов. Преобразованные видеосигналы с выходов преобразователей 3 и 4 поступают соответственно на третий вход коммутатора 8 и на первый вход блока 11, на четвертый вход коммутатора 8 и первый вход блока 12. Работа преобразователей 3 и 4, блоков 14 и 16, генератора 15 синхронизируется с помощью строчных и кадровых синхроимпульсов, поступающих с первого и второго выходов синхронизатора 5, причем тактовые импульсы, выдаваемые генератором 15, принудительно синхронизируются cTifo4ными и кадровыми синхроимпульсами. Кроме того, кадровые синхроимпульсы, поступающие на второй вход блока 13, используются для управления работой устройства - включения его в цепь распознавания и совмещения. Генератор 15 генерирует тактовые импульсы, синхронизированные со строчными и кадровыми синхроимпульсами, поступающими соответственно на его первьш и второй входы. Тактовые импульсы обеспечивают работурегистров сдвига, входящих в состав блоков 11 и 12, блока 18 и элемента 17 задержки, а также обеспечивает работу блока 16, являясь носителями временной информации. С выхода генератора 15 тактовые импульсы поступают на первые зходы элемента 17 задержки и блока 18 и на третьи входы блоков 1 4 и 1 6.. Включение устройства и цикл распознавания и совмещения осуществляются по командному импульсу (подаваемому оператором путем нажатия соответствующей кнопки), поступающему на вход запуска блока 13. В резуль- . тате, блок 13 обеспечивает пропуск одного из непрерывно поступающей на его второй вход последовательности синхроимпульсов кадрового синхроимпульса. Этот кадровый синхроимпульс разрешения совмещения поступает с выхода блока 13 на первый вход триггера 10 и на вторые входы блоков 14 и 16 и устанавливает их в исходное состояние, тем самым подготавливая и включая эти блоки в цикл распознавания и совмещения. По командному импульсу, поступающему на вход блока 13, первый по времени после этого кадровый синхроимпульс (разрешение совмещено) поступает на второй вход блока 14, котор пропускает по этой команде из после довательности непрерывно поступающи на его третий вход тактовых импульсов m пачек по п тактовых импульсов которые поступают с его первого выхода на вторые входы первого 11 и второго 12 блоков. Одновременно и синхронно с этими импульсами на первые входы этих блоков поступает в темпе развертки информация с раст ра мишени видиконрв соответствующих преобразователей 3 и 4. В результате, в электронные окна 28 блоков 11 и 12 записывается информация с части (или области ) растра мишени види конов соответствующих преобразовате лей 3 и 4, выделенной для распознавания. При этом в блоках 11 и 12 происходит непрерывное сравнение получаемого в электронном окне 28 изображения с изображением метки, записанным в коммутационных полях 29. В момент совпадения этих изображений первый 1Г и второй 12 блоки распознавания метки выдают им пульс распознавания, который с их выходов поступает соответственно на второй или третий входы триггера 10 и на четвертый или пятый вход блока 16. Так как в поло.жении плана ных структур на координатном столе существует рассогласование, а считыва ние изЬбражений происходит строго синхронно, то распознавание меток происходит в разные моменты времени Соответственно, в разные моменты времени выдают импульсы распознавакия блоки 11 и 12, В зависимости от того, на какой вход триггера 10 второй или третий поступает первым импульс распознавания, т.е. в зависимости от того, на какой планарной структуре - контролируемой или эталонной метка распознается раньше, t триггер 10 выдаёт соответствующие управляющие воздействия на первый и второй входы коммутаторов 8 и 9 и-на восьмой вход блока 16. В соответствии с этими воздействиями (т.е. в соответствии с тем, какая метка распознана раньше, а точнее, в соответствии с реальным простран-. ственным взаимным положением сравниваемых планарных структур) коммутатор 8 переключает видеосигналы со своих третьего и четвертого входов на первый и второй в.ыходы таким образом, чтобы видеосигнал изображения той планарной структуры, чья метка была распознана первой (опережающий видеосигнал), поступил на второй вход блока 18, а второй видеосигнал (отстающий) - на второй вход элемента 17 задержки. Коммутатор 9 обеспечивает выбранный режим контроля с использованием блока 7. Для того, чтобы на экране блока 7 разностная картина представлялась на фоне изображения эталонной структуры необходимо, чтобы на первый вход блока 6.и второй вход блока 7 постоянно поступал видеосигнал, соответствующий изображению эталонной планарной структуры. Для этого необходимо синхронное переключение входов и выходов обоих коммутаторов 8 и 9, что осуществляется в устройстве за счет использования для управления ими одних и тех же управляющих воздействий, выдаваемь х триггером 10. Эти же управлякяцие воздействия обеспечивают необходимую последовательность вычисления разности координат взаимного положения меток в блоке 16. Кадровый синхроимпульс Разрешение совмещения, поступая на второй вход блока 16, подготавливает (обнуляет) и включает его в работу. Блок 16 вычисляет разность координат между метками по осям X (кодичество тактов) и У (количество строк) и таким образом определяет разность координат взаимного положения сравниваемых планарных структур. На четвертый и пятый входы блока 16 поступают импульсы распознавания с выходов первого 11 и второго 12 блоков. Эти импульсы разнесены по времени и характеризуют взаимное пространственное положение сравниваемых структур. Определение разности координат по осям X и У в блоке 16 происходит поразному. Разность координат по оси У i определяется числом строчных синхроимпульсов, укладывающихся между первым и вторым импульсами распознавания. Эта разность всегда положительна. Определение разности коорди нат по оси X происходит иначе. В блоке 16 подсчитывается число тактовых импульсов от начала строки до момента поступления каждого из импульсов распознавания, эти значения запоминаются, а затем вычитаются, причем, так как взаимное положение меток по оси X не определяется тем, какая метка будет распознана первой а блок 16 всегда выдает результат вычитания из координаты метки, распознанной второй, координаты метки, распознанной первой (всегда именно в такой последовательности, что обеспечивается поступающим с второго выхода триггера 10 на восьмой вход блока 16 соответствующего управляющего воздействия), эта разность может иметь любой знак. Таким образом, блок 16 вычисляет разность координат положения сравниваемых стру тур по оси У и абсолютную величину разности и знак разности координат по оси X. Эти значения в виде соответствующего двоичного кода поступают с первого, второго и третьего выходов блока 16 определения коорди нат на первый, второй и третий входы блока 19..Для,того, чтобы реализ вать требуемое электронное совмещение и в том случае,, когда разность координат по оси X отрицательна, т.е. возникает необходимость не задержать, а ускорить опережающий видеосигнал, в устройстве предусмот рено дополнительная временная задержка отстающего ввдеосигнала на время п .тактовых импульсов. Эта вре менная задержка реализуется с помощью элемента 17 задержки, выполненного в виде регистра сдвига, содержащего соответственно п разрядов. Таким образом, на первый вход элемента 17 задержки поступает посл дoвaтeль ocть тактовых импульсов, а на второй вход с первого выхода первого коммутатора 8 - отстающий видеосигнал. Этот видеосигнал, . дополнительно задержанный, поступае с выхода элемента 17 задержки на четвертьй вход коммутатора 9. Блок 19 в соответствий с поступающими на его первый, второй .и тре тий входы двоичными кодами, характеризукзЩими разность координат взаи ного положения сравниваемых пленарн структур, подключает к третьему входу коммутатора 9 выход требуемог одного разряда электронного окна в бирая его из подключенных на его четвертый вход с выхода блока 18 выходов всех разрядов регистров сдвига электронного окна и подклю208чая его на свой выход. Тем cawijiM, формируется не.обходимая (требуемая) величина временной задержки для опережающего видеосигнала. Опереж щий видеосигнал поступает с второго выхода первого коммутатора 8 на второй вход блока 18, на первый вход которого поступают тактовые импульсы. Временная задержка осуществляется блоком 18 за счет того, что блок 19 подключает k третьему входу второго коммутатора 9 выход только одного (требуемого) разряда электронного окна блока 18, формируя таким образом из элементов этого блока элемент задержки, реализующий, требуемую временную задержку опережающего видеосигнала. Таким образом, в предлагаемом устройстве реализуется электронное совмещение изображений cpaвнивae й)}x планарных структур в блоке 7. Второй коммутатор 9 обеспечиваетпостоянство подключения видеосигнала,, соответствующего изображению эталонной структуры к первому входу блока 6, видеосигнал, соответствующий изображению контролируемой структуры, подключается к второму входу блока 6. После выполнения совмещения изображений контролируемой и эталонной структур осуществляется сам процесс контроля, заключающийся в выделении дефектов контролируемой структуры. В блоке 6 обеспечивается одновременное совмещение позитивного изображения контролируемой структуры с негативным изображением эталонной и негативного изображения контролируемой структуры с позитивным изображением эталонной и сложение этих разностных изображен1й. При сложении обоих разностных изображений получаем .полную разностную картину, характеризующую отличие изображения контролируемой планарной стру1стуры от эталонной. Этот разностный сигнал поступает с выхода блока 6 на первый вход блока 7. С целью визуального наблюдения изображения вьщеленных дефектов и их визуальной классификации при настройке устройства, анализе отказов интегральных схем и т.д. на второй вход блока 7 дополнительно подается сигнал, соответструкщий позитивному изображению эталонной структуры, в результате сложения двух сигналов в блоке 7 воспроизводится изображение выделен ных дефектов на фоне частично подав ленного изображения эталонной топологии, что позволяет наиболее правильно классифицировать дефекты и осуществить отбраковку дефектных структур. При необходимости цикл распознавания, совмещения и анализа может быть повторен, для этого необходимо на вход запуска блока 13 подать командный импульс. Первый коммутатор 8 видеосигнала работает следующим образом. На первый и второй входы первого коммутатора 8 поступают управляющие воздействия (в виде логической единицы 1 или О) соответственно с первого и второго выходов триггера 10, а-на третий и четвертый соответственно видеосигнал изображе ния контролируемой планерной структуры- (с выхода блока 3) и видеосигнал изображения эталонной планарной структуры (с выхода блока 4). Таким образом, первый видеосигнал поступа ет на вторые входы второго 232 и третьего 23 элементов И, а второй - на входа первого 23, и четвер того 23X элементов И. Если первой распознана метка на контролируемой планарной структуре, то на первый вход первого коммутатора 8 и соответственно на первые входы первого 23 .и второго 232 элементов И по ступает логическая 1, т.е. на пер вом входе коммутатора 8 устанавлива ется 1, а на втором остается О. В результате, видеосигнал изображен ния контролируемой планарной структуры (в этом случае опережающий) с выхода второго элемента И 23 поступает на первый вход второго элемента ИЛИ 24, с выхода которого образующего второй выход коммутатора 8, он поступает на второй вход блока 18, который и обеспечивает тре буемую временную задержку этого видео сигнала. Одновременно второй видеосигнал (отстающий) с выхода первого элемента И 23( поступает на первьй вход первого элемента ИЛИ 24, с выхода которого, образующего первый выход коммутатора 8, он поступает на второй вход элемента 17 задержки. Если первой распознана метк 0 .О на эталонной структуре, то на втором входе коммутатора 8 устанавливается 1, а на первом остается О и, в результате, на первый выход коммутатора 8 и соответственно на второй вход элемента 17 задержки поступает видеосигнал изображения контролируемой планарной структуры (в этом случае отстающий), а на второй выход и соответственно на второй вход блока 18 - видеосигнал эталонной структуры (в этом случае опережающий). Таким образом, на второй вход блока 18 всегда обеспечивается поступление опере.жающего видеосигнала. Второй коммутатор 9 выполнен и работает аналогично первому коммутатору 8 видеосигнала, обеспечивая постоянство на своих выходах: на первом - видеосигнала, соответствующего эталонной планарной структуре, на втором - видеосигнала, соответствующего контролируемой планарной структуре, что достигается синхронностью работы обоих коммутаторов 8 и 9 видеосигнала. Синхронность работы обеспечивается общим управлением, осуществляемым триггером 10. Триггер 10 работает следующим образом. По команде Разрещение совмещения управляющий триггер 10 подготавливается к работе, а именно кадровый синхроимпульс Разрешение совмещения поступает на первый вход управляющего триггера 10 и соответственно на R-входы первого 25 t и второго 25 SR-триггеров, обнуляя их (на прямых. выходах устанавливается О, на инвареных - 1). В результате, на первых входах первого 26 и второго 26 элементов И устанавливаются 1, поступакмцие с инверсных выходов соответственно первого 25( и второго 252 SR-триггеров. Если первой распознана метка на контролируемой планарной структуре, то импульс распознавания с выхода первого блока 11 поступает на второй вход триггера 10 и соответственно на второй вход второго элемента И 26, на первьй вход которого 1 уже подана. В результате, с выхода второго элемента И 26 сигнал поступает на S-вход первого SR-триггера 25,, и он опрокидывается. При этом на его прямом выходе устанавливается 1, на инверсном - О. В результате, на первом входе элемента И 26V устанавливается О, т.е. он запирается и прохождение сигнала (импульса распознавания) о р спознавании метки на эталонной планарной структуре на S-вход второго SR-триггера 25 исключается. Таким образом, на первом выходе управлянлцего триггера 10 устанавливается 1, а на втором - О. Если первой распознана метка на эталонной планарной структу ре, то триггер 10 работает аналогично, но в результате на его первом выходе устанавливается О, а на втором - 1.
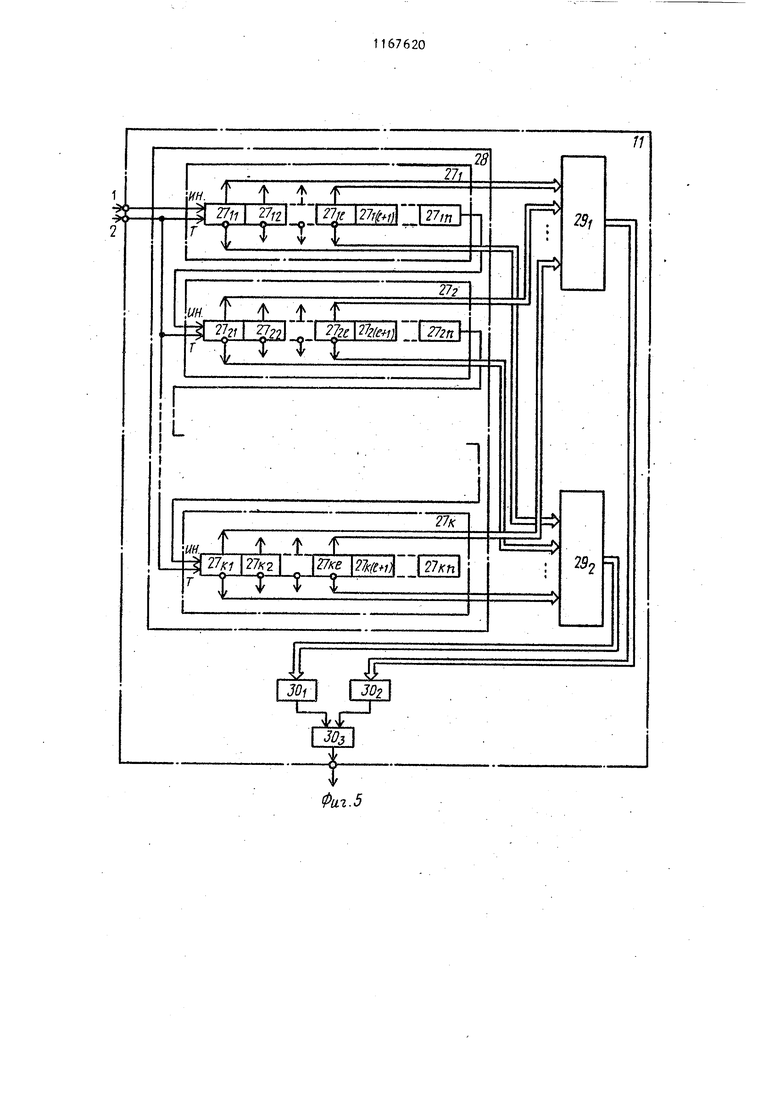
Влок 11 работает следующим образом На первый вход блока 11 и соответственно на информационный вход первого регистра 27( электронного окна 28 с выхода преобразователя 3 поступает квантованный по уровняю
и кодированный видеосигнал, (в виде последовательности логических 1 и О, причем метке соответствует а фону - О), соответствующий . контролируемой планарной структуре. На его второй вход и соответственно на тактовые входы всех регистров 27 с первого выхода блока 14 поступают m пачек из п тактовых импульсов, которые этот блок пропускает из непрерывно поступающей на его третий вход последовательности тактовых импульсов при поступлении на его второ вход кадрового синхроимпульса Разрешение совмещения (т.е. поступает с первого по п-й тактовые импульсы первой строки, затем пропуск, затем с первого по п-й тактовые импульсы второй строки, опять пропуск и т.д. . по щ-ю строку включительно). В соответствии с этим в регистры 27., образующие электронное окно 28, считываеся ннфорйация с требуемого выделенного для распознавания участка растра мишени, видикона преобразовавтеля 3, который имеет размеры nxm (т.е. га строк с первой по т-ю и п тйктов с первого по п-й). Записываемая информация последовательно смещается по разрядам регистров 27 сдвига
В соответствии с предварительными сведенйями о конфигурации и размерах метки на коммутационных полях 29 до начала работы набирается (записывается) их изображение, причем на пер вом коммутационном поле 29j замыкаются контакты, соответствующие конфигурации метки, а на втором поле 29
наоборот - контакты вне ее, остальные контакты разомкнуты. Так как входы всех контактных ячеек первого коммутационного поля 29j подключены к прямым выходам соответствующих разрядов регистров 27 электронного окна 28, а входы второго коммутационного поля 29 - к их инверсным выходам, в момент совпадения перемещающегося по электронному окну 28 изображения с изображением, записанным на коммутационных полях 29, с выходов -замкнутых контактных ячеек коммутационных полей 29 на все входы первого 30, и второго 30 элементов И поступает логическая 1, с выходов которых она поступает на соответствующие входы третьего элемента И 30j. В результате на выходе третьего элемента И 30 и соответственно на выходе блока 11 появляется логическая 1 - импульс распознавания. Если хотя бы один рлемент изображения, полученного в электронном окне 28, не совпадает с изображением первого коммутационного Поля 29{ (для прямых выходов соответствующих разрядов регистров 27) или второго коммутационного поля 29 (для инверсных выходов тех же разрядов), то импульс распознавания блоком 11 метки не выдается, т.е. если метка на планарной структуре имеет инзто, чем требуемая, конфигурацию, то она не распознается и совмещение сравниваемых планарных структур, а следовательно, и дефектоскопия не производятся.
Блок 12 выполнен и работает аналогично блоку 11. Он осуществляет распознавание метки на эталонной планарной структуре. t ...
Блок 13 работает следующим образом .
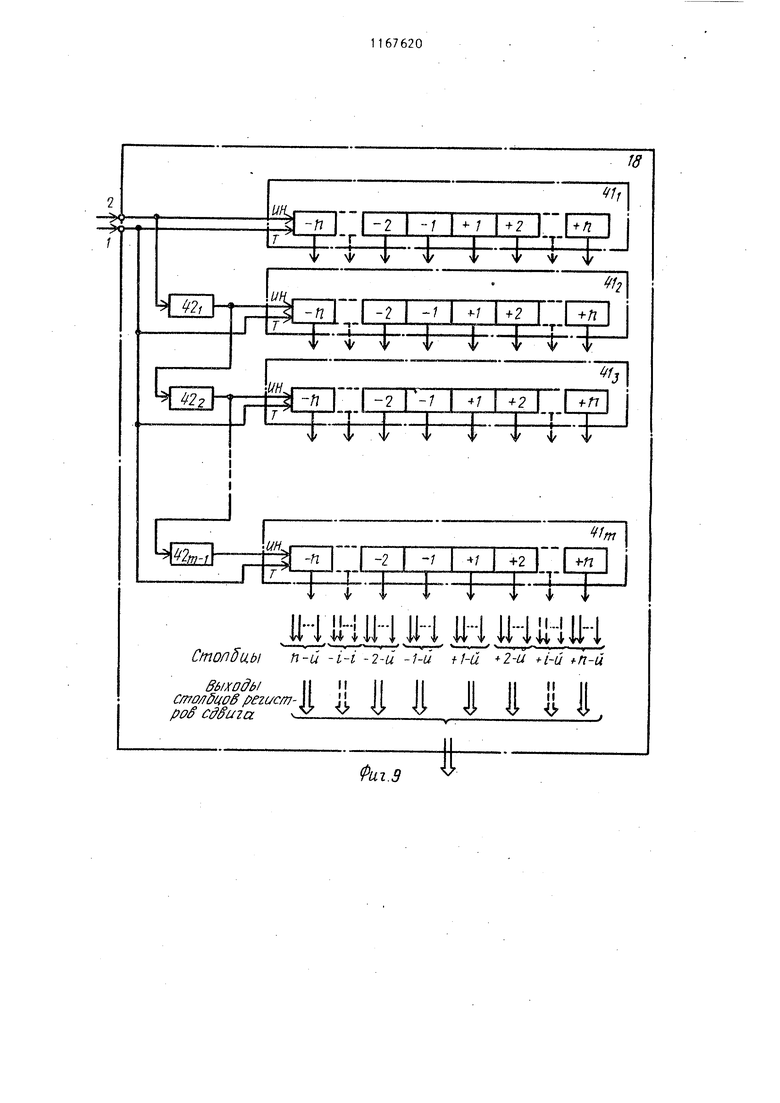
Исходно SR-триггер 34 находится в состоянии О, таким образом, на втором входе элемента И 35 присутст вует О, что препятствует прохождению на вход блока кадровых сийхроимпульсов, поступающих на второй вход блока 13 и соответственно на первый вход элемента И 35. Кактолько на S-вход SR-триггера 34 поступает командный импульс, имеющий потенциал 1, SR-триггер опрокидывается в состояние 1. Поскольку его прямой вы- ход подключен к второму входу элемента И 35, последний таким образом подготавливается к пропуску кадрового синхроимпульса из последовательности непрерывно поступающих на его первый вход кадровых синхроимпульсов Первый после этого поступивший на второй вход блока 13 и соответственно на первый вход -элемента И 35 кадровый синхроимпульс поступает с выхо да элемента И 35 на выход и на вход элемента 36 задержки. После необходи мой задержки, обеспечивающей пропуск только одного кадрового синхроимпуль са, этот импульс поступает с выхода элемента 36 задержки на, R-вход SRтриггера 34 и устанавливает его в исходное состояние О, тем самым снимая 1 с второго входа элемента И 35, т.е. запирая его, препятствуя прохождению последующих кадровых синхроимпульсов на выход блока. В ре зультате J блок 13 переводится в ксходное состояние. Блок 14 работает следующим образом . После того, как кадровый синхроим пульс Разрешение совмещения с выхо да блока 13 поступает на R-вход (вхо обнуления) второго счетчика 32, npd исходит сброс (обнуление) этого счет чика, и он подготавливается к новому циклу работы (счета). Связанный с этим счетчиком второй дешифратор 33 устроен и работает так, что при нали чии на его входе соответствующего текущему значению номера строки с первой по т-ю на его выходе присут ствует сигнал, который снимается, как только текущее значение номера строки становится больше т. Таким образом, после-обнуления второго счетчика 32, на выходе второго деши-2 на выходе второго дешифратора 33. ,j появляется сигнал, который поступи рый поступает на третий вход третьего элемента И 31з и второй вход первого элемента И 31, обеспечив тем самым пропуск поступающих на первый вход первого элемента И 31 строчных синхроимпульсов на счетный вход второго счетчика 32. Аналогично каж дый из строчных синхроимпульсов, поступая на R-вход (вход обнуления) первого счетчика 32,, обеспечивает сброс (обнуление) этого счетчика и, тем самым, подготовку его к новому циклу работы (счета). Связанный с этим счетчиком первый дешифратор 33 устроен и работает так, что при нали чии на его входе кода, соответствующего текущему значению номера тактового импульса с первого по п-й (в каждой строке), на его выходе присутствует сигнал, который снимается, как только текущее значение номера тактового импульса становится больше п. Таким образом, после обнуления первого счетчика 32 на выходе первого дешифратора 33 появляется сигнал, который поступает на второй вход третьего элемента И ЗЦ и второй вход второго элемента И З., обеспечив, тем самым, пропуск поступающих на первый вход второго элемента И 312 тактовых импульсов на счетный вход первого счетчика 32. В результате, после поступления на его второй вход кадрового синхроимпульса Разрешение совмещения блок 14 подготавливается к пропуску на его первый выход поступающих на его третий вход тактовых импульсов в требуемом для этого колич стве и порядке (т последовательностей из п тактовых.импульсов или m пачек по п тактойых импульсов с требуемым временным интервалом между ними), что осуществляется следующим образом. Наличие на втором и третьем входах третьего элемента И 31.j сигналов , поступающих с выходов соответственно первого 33j и второго 33, дешифраторов, обеспечивает пропуск поступающих на его первый вход тактовых импульсов на первый выход бло- ка 14. После отсчета первых п тактовых импульсов на выходе первого дешифратора 33, и соответственно на вторых входах второго 31 и третьего 31 элементов И сигнал снимается и тем самым, прекращается поступление тактовых импульсов соответственно на счетный вход первого счетчика 32| и на первый выход блока 14. Информация об отсчете первых п тактовых импульсов поступает также с выхода первого дешифратора 33,х на третий выход блока 14 и соответственно на седьмой вход блока 16 Точно также следующий по порядку строчный синхроимпульс обнуляет первый счетчик 32, в результате появляется сигнал на выходе первого дешифратора 33 j и со- ответственно на вторых входах второго 31 и третьего 31j элементов И, и цикл работы блока 14 повторяется, т.е. обеспечивается пропуск следуюей пачки из п тактовых )импульсов а первый выход блока и т.д. Одновременно второй счетчик 32 считает количество поступающих на его счетный вход строчных синхроимпульсов После отсчета первых m строчных синхроимпульсов на выходе второго дешифратора 33л и соответственно на втором входе первого элемента И 31 и третьем входе третьего элемента И 31 снимается сигнал и, тем самым, прекращается поступление строчных синхроимпульсов на счетный вход второго счетчика 322 и тактовых импульсов на первый вход блока 14. Информа ция об отсчете первых m строк (строч ных синхроимпульсов) в кадре поступает также с выхода второго дешифратора 33 на второй выход блока 14 и соответственно на шестой вход блока 16. Блок 16- работает следующим образо В работе блока 16 можно выделить три составных элемента: подготовка и включение блока в -работуj определе ние разности координат взаимного положения сравниваемых структур по оси У; определение разности координат взаимного положения сравниваемых планарных структур по оси X. По команде Разрешение кадровый синхроимпульс Разрешение совмещения поступает с выхода блока 13 на второйвход блока 16. При этом он поступает на R-входа (входы обнуления) Т-триггера 54, третьего 52- и четвертого 52 SR-триггеров, на вход обнуления первого, счетчика 53., а через второй 50) и третий 502 элементы РШИ на входы обнуления соответственно второго 53 и третьего 33 счетчиков обеспечивая их обнуление, и на S-вхо пятого SR-триггера 525, опрокидывая его в 1 и, тем самым, обеспечивая наличие 1 на вторых входах пятого 515 и шестого 51 элементов И. В результате, блок 16 подготавливает ся к работе. В блоке вычисляется- разность координат межиУ метками по осям X (в числе тактов) .и У (в числе строк), и таким образом определяется разность координат взаимногч положения сравниваемых йланарных структур для выполнения последующего электронного совмещения их изображе-ний в блоке 7. Разность взаимного положения сравниваемых планарных структур по оси 3 в блоке 16 вычисляется путем подсчет целого числа строчных синхроимпуль- сов, укладывающихся между импульсами 0 распознавания, поступающими из первого 11 и второго 12 блоков соответственно на его четвертый и пятый входы. В зависимости от того, какая метка распознана первой - метка на контролируемой планарной структуре или на эталонной первый импульс распознана- ния поступает соответственно на четвертьй или пятый входы блока 16 и соответственно на первьй или второй вход четвертого элемента ИЛИ 50 с выхода которого импульс потенциала 1 поступает на С-вход Т-триггера 54, который опрокидывается в состояние 1 и с выхода которого 1 поступает на вход Разрешение счета первого счетчика 53)/. В результате, первый счетчик 53 начинает считать строчные синхроимпульсы, непрерывно поступающие на первый вход блока 16 и соответственно на счетный вход это го счетчика. После прихода второго импульса распознавания Т-триггер 54 опрокидывается в состояние О, О с его выхода поступает на вход Разрешение счета первого счетчика 53j и запрещает счет. В результате, на выходах первого счетчика 53( сформируется двоичный код координаты У разности координат взаимного положения сравниваемых планарных структур, соответствующий количеству строчных синхроимпульсов (строк), укладывающихся по времени между первым и вторым импульсами, распознавания. Этот код (координата У) поступает на третий выход блока 16. Разность координат взаиу1ного положения сравниваемых планарных структур по оси X в блоке 16 вычисляется следующим образом. .Определяется координата X каждой из.распознаваемых меток, а именно подсчитывается число тактовых.импульсов (тактов) от начала строки до момента поступления соответствующего импульса распознавания. Для этой цели используются второй 53 и третий 53 счетчики. Если распознавания метки не происходит, то строчной синхроимпульс обнуляет эти счетчики. ЕСли распознавание произошло, т.е. если поступил импульс распознавания, то число тактовых импульсов от начала строки до момента распознавания,, т.е. до поступления импульса распознавания, запоми- нается. Эти значения поступают в сумматор 55, где определяется координата X разности положения сравниваемых планарных структур, причем в зависимости от взаимного положения меток эта разность -имеет знак + или -. Итак, определение координаты X в блоке 16 определения координат происходит следующим образом. Строчной синхроимпульс, поступая на S-входы первого 52j и второго 52 SR-триггеров, опрокидывает их в поло жение 1. 1 с выхода этих SR-триг геров поступает на первые входы соот ветственно третьего 51 и четвертого 51 4 элементов элементов И, на вторые входы которых 1 подана с ин BepcfiHX .выходов третьего 52 и четвертого 524 SR-триггеров (кадровый синхроимпульс Разрешение совмещения подготавливая блок 16 к работе, обнуляет эти SR-триггеры). 1 с вы хода третьего 51, и четвертого 514 элементов И поступает на первые входы соответственно пятого 51j и шестого 51 элементов И, на вторые входы которых 1 подана с выхода пятого SR-триггера 52 (кадровьш синхроимпульс Разрешение совмещения, подго тавливая блок16 к работе, опрокидывает, этот триггер в I) 1 с вы ходов этих элементов И поступает на входы разрешения счета соответственно второго 532 третьего 532 счетчиков, которые начинают считать поступающие на их счетные входы с третьего входа блока 16 (тактовые , импульсы поступают непрерывно на тре тий вход блока 16) тактовые импульсь| Если распознавания меток не произошло (т.е. импульсы распознавания не поступили), то поступающий с третьего выхода блока 14 на седьмой вход блока 16 и соответственно на R-входы первого 52, и второго 52 SR-триггеров сигнал обнуляет их.. О с выхода этих SR-триггеров поступает на пер-. вые входы соответственно третьего 51 и четвертого 51ц элементов И, с выхо да которых он поступает на первые ВХОДЭ1 соответственно пятого шестого 51g элементов И, с выхода . которых - на входы разрешение счета соответственно второго 53 и третьего 53 счетчиков, запрещая, тем самым, счет. Кроме того,сигнал с треть- т его выхода блока 14 поступает на пер вые входы первого 51 и второго 51 элементов И, на вторые входы которых подана с инверсных выходов соответственно третьего 52.J и четвертого 524 SR-триггеров (кадровый синхроимпульс. Разрешение совмещения, подготавливая блок 16 к работе, обнуляет эти SR-триггеры). В результате, 1 с выходов первого 51 и второго 512 элементов И поступает на вторые входы соответственно первого и второго 50 элементов ИЛИ, с выходов которых она поступает на входы обнуления соответственно второго 532 третьего 53 счетчиков, обнуляя их. При поступлении следующего строчного синхроимпульса цикл работы блока 16повторяется. Если метка распознается, т.е. на четве тый или пятый входы блока 16 поступает импульс распознавания, то (для определенности предположим, что импульс распознавания поступил на четвертый вход блока 16 и соответственно на S-вход третьего SR-триггег:. / ра 52), поступая на S-вход третьего SR-триггера 52з, этот импульс опрокидывает триггер в 1. О с инверсного выхода этого SR-триггера поступает на вторые входы первого 51 и третьего 51 - элементов И, с дов которых он передается соответственно на второй вход второго элемента ИЛИ 501 и на первый вход пятого элемента И 51., с выходов которых он поступает соответственно на вход обнуления второго счетчика 532 предотвращая его обнуление сигналом с третьего выхода блока 14, и на вход разрешения счета этого же счетчика, обеспечивая запоминание в нем числа тактовых импульсов с начала текущей строки до прихода импульса распознавания (т.е. до момента распознавания метки). Это сформированное (в виде двоичного кода) на выходе второго счетчика 532 значение поступает на первый вход сумматора 55. Сброс этого значения может тепер1ь осуществить тс)лько следующий, кадровый синхроимпульс Разрешение совмещения. До того, как поступит сигнал о распознав вании второй метки (второй импульс распознавания на пятый вход блока 16), третий счетчик 53 подсчитывает число тактовых импульсов с начала каждой строки (текущей) до сигнала с третьего выхода блока 14 и обнуляется этим сигналом и т.п. Как только на пятый вход блока 16 поступает второй импульс-распознавания (сигнал о распознавании второй метки) и в третьем /счетчике 53}. происходит запоминание числа тактовых импульсов от начала т кзтцей строки до момента прихода им-пульса распознавания, код этого знач ния поступает с выхода третьего счет чика 533 на второй вход сумматора 55 работающего в режиме вычитания, в ко тором из значения, поступающего на первый вход (т.е. из координаты метки на контролируемой планарной струк туре), вычитается значение, поступаю щее на второй вход (т.е. координата метки на эталонной планарной структуре), причем вне зависимости от того какая из этих меток распознана первой, В результате, абсолютное значение этой разности, т.е. разности ко ординат взаимного -положения сравниваемых планарных структур по оси X, и ее знак поступают соответственно на второй и первый выходы сумматора 55. Для согласованной работы бло ков 16 и 19 (т.е. для правильного формирования требуемой временной задержки опережающего видеосигнала) необходимо, чтобы блок 16 выдавал результат вычитания из координаты метки, распознанной второй, координаты метки, распознанной первой. Этот результат отличается от .выдавае мого сумматором 55 только знаком и только в том случае, .если-первой распознана метка на контролируемой планарной структуре. Для необходимой коррекции знака разности используется элемент ИСКШОЧАЮЩЕ ИЛИ 56. В том случае, когда первой распознана метка на контролируемой планарной структуре, с второго выхода триггера 10 на восьмой вход блока 16 и со-° ответственно на второй вход элемента ИСКЛЮЧАЮЩЕЕ, ИЛИ 56-поступает О. В результате, на второй выход блока 16 поступает с второго выхода сумматора 55 абсолютное значение разности координат взаимного положения меток по оси X (точнее, соответствующий этому значению код), а на первый выход с выхода элемента ИСКЛЮ ЧАЮЩЕЕ 11ПИ 56 - код знака, противоположного знаку, выдаваемому сумматором 55, т.е. этот результат соответствует требуемому и обеспечивает правильное формирование временной задержки. Если первой распознана метка на эталонной планарной структуре, то на второй вход элемента ИСКЛЮЧАЮЩЕЕ ШШ 56 поступает 1 и, в результате, на первьй выход блока 16 поступает код знака, вьщаваемый сумматором 55. Таким образом, абсолютное значение разности координат взаимного положения сравниваемых планарных структур по оси X и ее знак поступают соответственно на второй и первый выходы блока 16 определения координат. Блок 16 работает следующим образом. На информационные входы регистра 41 поступает информация (в нашем случае видеосигнал), на тактовые входы регистров 41 - последовательность тактовых импульсов, в результате происходит последовательная запись информации в раз1Ьяды регистров, но, в.отличие от известных примеров использования, электронное окно в. предлагаемом устройстве позволяет получить требуемую временную задержку видеосигнала. В предлагаемом устройстве в регистр 41 блока 18 информация поступает прямо с выхода соответствующего преобразователя 3 или 4 и записывается без задержки, в. регистр 41 эта информация поступает уже с задержкой на одну строку, что обеспечивается элементом 42( задержки, в регистр 41,с задержкой на две строки, что обеспечивается последовательным включением элементов 42( и 42 заде рйжи и т.д. Используя выходы разрядов каждого из регистров 41 сдвига, можно получить требуемую временную задержку опережающего видеосигнала, т.е. подсоединяя к входу блока 7 выход нужного разряда соответствующего регистра 41, получаем требуемую временную задержку, причем номер регистра 41 соответствует числу строк, а номер разряда этого регистра - числу тактов и знаку, сформированным в блоке 16 в соответствии с реальной разницей в положении сравниваемых планарных структур. Блок 19 работает следующим образом. . На первьй, второй и третий входы блока 19 поступают (с соответствующих выходов блока 16) двоичные коды, соответствующие знаку разности координат положения сравниваемых плаяЙР:
Hbjx структур по оси.Х, абсолютному значению этой разности и значению разности координат положения сравниваемых планарных структур по оси У. Соответствейно первые два кода по- 5 ступают на первый и второй входы . коммутатора 43, который работает следующий образом. Каждый элемент кода,, имеющий значение 1 или О, поступает на вход соответствующего Ю информационного канала 48 (/ и соответственно на вторые входы перво-го 49-f и второго 49, элементов И . На первый вход второго элемента И 49 всех информационных каналов 48 посту-15 пает сигнал (1 или О) с выхода инвертора 47, а первые входы первых элементов И 49, всех информационных каналов 48 объединены с входом инвертора 47. Таким образом, если20 разность координат положения сравниваемых планарных структур по оси X положительна, то на первый вход мутатора 43 знака и соответственно на вход инвертора 47 и первые вхо 25 да. первых элементов И 49с всех информационных каналов поступает 1 . (на первые входы вторых элементов И 492 всех информационных канатов 48 поступает О с выхода ин- 30 вертора 47), в результате обеспечивается пропуск кода с второго входа коммутатора 43 знака на его второй выход. Если разность координат отрицательна, то на первый вход « коммутатора 43 знака и соответственно на вход инвертора 47 и первые входы первых элементов И 49, всех информационных каналов 48 поступает О. С выхода инвертора 47 на дО первые входы вторых элементов И всех информационных каналов 48 поступает 1, в результате обеспечивается пропуск кода с второго входа коммутатора 43 знака на его первый вы- 45
ход..
I-
Таким образом, двоичный код, соответствующий разности положения сравниваемых планарных структур по оси X (с учетом знака разности), 50 с первого или второго выхода коммутатора 43 знака поступает на вход либо первого 44д, либо второго 44 дешифраторов. Дешифраторы 44 преобразуют поступаняций на их входы двоич-55 ный код в десятичный, т.е. в результате преобразования 1, сформируется только на одном, соответствующем
значению разности координат взаимого положения сравниваемых планарных структур по оси X, выходе одного из дешифраторов. Эта 1 поступает на третий вход соответствующего (имещего соответствующий номер) одного коммутатора 45, тем самым только этот коммутатор 45 подготавливается к пропуску видеосигнала. К второму входу каждого коммутатора 45 столбца подключен выход столбца регистров 41 блока 18, который образуют объединенные в подгруппу разряды, имеющие тот же номер, всех регистров 41 сдвига блока 18. В результате, подготавливаете подключение к третьему входу коммутатора 9 выхода одгЛэго из тех разрядов регистров 41 блока 18, которые имеют соответствующий величине разности координат положения срав ниваемых планарных структур по оси X номер и, тем самым, обеспечивается (путем формирования, таким образом, необходимой временной задержки) требуемое смещение изображения, соответствующего опережающему видеосигналу, на блоке 7 по оси X. На третий вход блока 19 и соответственно на первые входы всех коммутаторов 45 с третьего выхода блока 16 поступает соответствующий значению координаты У двоичный код, т.е. код соответствующего этой разности положения сравниваемых планарных структур по оси У числа строк. В результате, в каждом коммутаторе 45 осуществляется для подключения .на его выход выбор одного из подключенньге на его второй вход выходов одноименных разрядов регистров 41 блока 18, а именно разряда того регистра 41, номер которого соответствует коду координаты У, т.е. числу строк, на которое необходимо сместить изображение, соответствующее опережающему видеосигналу на блоке 7 по оси У для выполнения требуемого срвмещения изображений сравниваемых планарных структур. Но только в одном коммутаторе 45 обеспечивается подключение выхода этого разряда соответствующего регистра 41 на выход коммутатора 45 и соответственно через элемент ИЛИ 46 на выход блока 19. Итак, блок 19 обеспечивает в соответствии с поступающими на его первый, второй и третий входы координатами разности попожения сравниваемых пленарных струк тур подключение на его выход из всех, подключенных на его четвертый вход выходов разрядов регистров 41 блока 18 выход только одного, соответствующего этим координатам (т.е. числу строк, числу и знаку тактов), разряда, т.е. подключение выхода только этого одного разряда регистСС I
2 опт ф
Юпт
канал кана/j
о-$j I разреме/ ие
1 0 -24 ра 41 к третьему входу коммутатора 9. Таким образом, блок. 19 формирует с помощью элементов 42 задержки и разрядов регистров 41 блока 18 необходимую для выполнения точного совмещения в блоке 7 изображений сравниваемых планарных структур временную задержку опережающего вндеЬсигнала.
Т t t
.Ш1Ш
ГгтЧ
г
/V
JL,.1.J:
w.
q:CISI -L ns -.
.
27/
f
FO
Разрешение ф-riУУГ- -Ф Ф Ф Ф Ф
4 4 Ф j/ 4
-2 -/
7 +2
+77 |
ИП 1j-- - «. iWil-li nr II II
PplLl2--J- .1 jjJ / i у I , I I
ффффФv4V жзCmonSubiT.№ , Ф i г ul,;H i ili. Ui iri, n-u -i-i -2-й -1-й H-u 2-и -i-й i-n-u - II I I l. 40.,.И j -2 -7 Фиг.З
yv
4X
TSi.
c;
CM
&
rj
| Патент | |||
| ГДР № 215183, .кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Патент США № 3909602, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Устройство дефектоскопического контроляплАНАРНыХ СТРуКТуР | 1978 |
|
SU813202A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
