Изобретение относится к области авиационного приборостроения и предназначено для использования в составе бортовых боевых комплексов летательных аппаратов.
Известны комплексные навигационные системы (KCH) на основе инерциальных датчиков скорости и курса и спутниковых датчиков скорости и координат, описание которых приведено в книге [1] под редакцией В.Н. Харисова и др. Глобальная спутниковая радионавигационная система, Москва, ИПРЖР, 1998 г., стр. 373-376 и в книге [2] О.А. Бабича. Обработка информации в навигационных комплексах, Москва, Машиностроение, 1991 г., стр. 198-225, 476-485, которая является наиболее близким аналогом. В данной системе, содержащей инерциально-спутниковый датчик скорости и курса (ИДСК), спутниковый датчик скорости и курса (СДСК), корректирующий фильтр (КФ), блок формирования навигационных параметров (БФНП). При погрешностях ИДСК по составляющим скорости за время 5-10 мин ([3] Н.Т. Кузовков, О.С. Салычев. Инерциальная навигация и оптимальная фильтрация, Москва, Машиностроение, 1982 г., стр. 104):
A1 = a1+a2t+a3t2+(a4+a5 t)•V2,
A2 = b1+b2t+b3t2-(a4+a5 t)•V1,
(здесь a, b - постоянной величины, a4 - погрешность по географическому курсу, a5 - дрейф по курсу, V1, V2 - составляющие путевой скорости в географических осях) по сравнению с данными СДСК в КФ выделяются 
 Разделение погрешностей a1, a2, a3, b1, b2, b3 и a4, a5 в прямолинейном полете при V1≈const, V2≈const невозможно, а на разворотах появляются погрешности СДСК, обусловленные переходом в режим поиска оптимальных сочетаний (созвездий) спутников. Соответственно погрешность по географическому курсу при различных способах выставки составляющая Δψ = (a4+a5t) = 0,25°-2°, не влияющая на погрешности откорректированных составляющих скорости в географических осях, приводит к погрешностям по составляющим скорости в осях летательного аппарата, формируемом в БФНП для потребителей. Например, по одной составляющей скорости погрешность Δv1= Δψ•v2, что при Δψ = 2°, V2 = 150 м/с, составляет Δv1= 5 м/с. Наличие этих погрешностей является недостатком ближайшего аналога.
Разделение погрешностей a1, a2, a3, b1, b2, b3 и a4, a5 в прямолинейном полете при V1≈const, V2≈const невозможно, а на разворотах появляются погрешности СДСК, обусловленные переходом в режим поиска оптимальных сочетаний (созвездий) спутников. Соответственно погрешность по географическому курсу при различных способах выставки составляющая Δψ = (a4+a5t) = 0,25°-2°, не влияющая на погрешности откорректированных составляющих скорости в географических осях, приводит к погрешностям по составляющим скорости в осях летательного аппарата, формируемом в БФНП для потребителей. Например, по одной составляющей скорости погрешность Δv1= Δψ•v2, что при Δψ = 2°, V2 = 150 м/с, составляет Δv1= 5 м/с. Наличие этих погрешностей является недостатком ближайшего аналога.
Задачей изобретения является повышение точности работы системы.
Достигается это тем, что в комплексную навигационную систему, содержащую спутниковый датчик скорости и координат, последовательно соединенные инерциальный датчик скорости и курса, корректирующий фильтр, блок формирования навигационных параметров, на второй и третий входы которого подключены соответственно второй выход инерциального датчика скорости и курса и первый выход спутникового датчика скорости и координат, второй выход которого подключен ко второму входу корректирующего фильтра, дополнительно введены, включенные между первым выходом корректирующего фильтра и входом инерциального датчика скорости и курса последовательно соединенные блок запоминания и блок формирования погрешности географического курса, на второй вход которого подключен второй выход блока формирования навигационных параметров, третий выход которого подключен ко второму входу блока запоминания, на третий вход которого подключен второй выход корректирующего фильтра.
На чертеже представлена блок-схема предлагаемой системы, содержащей:
1 - блок формирования навигационных параметров БФНП,
2 - инерциальный датчик скорости и курса ИДСК,
3 - корректирующий фильтр КФ,
4 - спутниковый датчик скорости и координат СДСК,
5 - блок формирования погрешности географического курса БФПК,
6 - блок запоминания БЗ.
Связи между блоками осуществляются, например, по последовательному коду.
Система работает следующим образом.
При полете летательного аппарата заданному маршруту ([2], стр. 295), состоящему из прямолинейных участков и разворотов, с первого выхода ИДСК 2, горизонтированные составляющие скорости движения летательного аппарата в осях гироплатформы
V1и = V1+A1 = a1+a2t+a3t2+(a4+a5 t)•V2+V1,
V2и = V2+A2 = b1+b2t+b3t2-(a4+a5 t)•V1+V2,
поступают на первый вход КФ 3, на второй вход которого со второго выхода СДСК 4 поступают составляющие скорости полета в географических осях  где
где  флюктуационные высокочастотные погрешности; систематические погрешности составляющих скорости в прямолинейной горизонтальном полете практически равны нулю ([2], стр, 477). В КФ 3 формируются оценки погрешностей
флюктуационные высокочастотные погрешности; систематические погрешности составляющих скорости в прямолинейной горизонтальном полете практически равны нулю ([2], стр, 477). В КФ 3 формируются оценки погрешностей  и откорректированные составляющие скорости
и откорректированные составляющие скорости  .
.
Например, при линейной стационарной фильтрации
(здесь Т - постоянные времени, p - оператор дифференцирования) после окончания переходного процесса за время tn выделяются A1, A2 и подавляется  практически до любого близкого к нулю состояния.
практически до любого близкого к нулю состояния.
Тогда 
соответственно  .
.
Параметры  с первого выхода КФ 3 выдаются потребителям и поступают на первый вход БЗ 6 и на первый вход БФНП 1.
с первого выхода КФ 3 выдаются потребителям и поступают на первый вход БЗ 6 и на первый вход БФНП 1.
Параметры  со второго выхода КФ 3 поступают на третий вход БЗ 6.
со второго выхода КФ 3 поступают на третий вход БЗ 6.
Со второго выхода БФНП 1 сигнал текущего времени t поступает на второй вход БФПК 5.
При полете летательного аппарата по прямолинейным участкам, например, первому, второму, третьему в БФНП формируются, сигналы времени окончания коррекции t1, t2= t1+τ1= t1+tp1+tn, t3= t2+tp2+tn= t1+τ2, τ2= τ1+tp2+tn, которые с третьего выхода БФНП 1 поступают на второй вход БЗ 6. БЗ 6 реализован на стандартных элементах запоминания (пример реализации приведен в книге [4] И. М. Тетельбаума, Ю. Р. Шнейдера "400 схем для АВМ", Москва, Энергия, 1978 г. , стр. 124, 125), осуществляющих запоминание сигналов, поступивших по первому и третьему входам по сигналам t1 > 0, t2 > 0, t3 >0:
- на первом прямолинейном участке коррекции запоминаются сигналы

- на втором (после первого разворота) прямолинейном участке запоминаются сигналы


- на третьем (после второго разворота) прямолинейном участке коррекции запоминаются сигналы



С выхода БЗ 6 сигналы t1, t2, t3, V11, V21, V12, V22, V13, V33, A11, A21, A12, A22, A13, A23 поступают на первый вход БФПК 5, являющемся стандартным устройством, выполняющем арифметические операции сложения, вычитания, умножения, деления (пример реализации приведен в книге [5] Л.Н. Преснухина, П.В. Нестерова. Цифровые вычислительные машины, Москва, Высшая школа, 1981 г., стр. 16).
По поступившим сигналам в БФПК 5 формируются сигналы:
B1 = (A12-A11)•(t3-t1) - (A13-A11)•(t2-t1),
B2 = (A22-A21)•(t3-t1) - (A23-A21)•(t2-t1),
f1 = (V22-V21)•(t3-t1) - (V23-V21)•(t2-t1),
f2 = (t2V22-t1V21)•(t3-t1) - (V23t3-V21t1)•(t2-t1),
f3 = (V12-V11)•(t3-t1) - (V13-V11)•(t2-t1),
f4 = (t2V12-t1V11)•(t3-t1) - (t3V13-t1V11)•(t2-t1),

С выхода БФПК 5 сформированная погрешность по географическому курсу  поступает на вход ИДСК 2, где осуществляется коррекция курса с точностью примерно δ = 0,1•Δψ = 1÷12 угл.мин., что значительно меньше, чем в ближайшем аналоге. Со второго выхода ИДСК 2 сигнал ψк= ψ+δ (здесь ψ - действительное значение географического курса) выдается потребителям и поступает на второй вход БФНП 1, на третий вход которого поступают сигналы географических координат местоположения летательного аппарата x1c, x2c с первого выхода СДСК 4.
поступает на вход ИДСК 2, где осуществляется коррекция курса с точностью примерно δ = 0,1•Δψ = 1÷12 угл.мин., что значительно меньше, чем в ближайшем аналоге. Со второго выхода ИДСК 2 сигнал ψк= ψ+δ (здесь ψ - действительное значение географического курса) выдается потребителям и поступает на второй вход БФНП 1, на третий вход которого поступают сигналы географических координат местоположения летательного аппарата x1c, x2c с первого выхода СДСК 4.
В БФНП 1 осуществляется счисление географических координат по составляющим скорости  и их коррекция по данным x1c, x2c, счисление ортодромических координат x0, x0 ([1], стр. 249-254, стр. 467, стр. 255-258), формирование составляющих путевой скорости в осях летательного аппарата
и их коррекция по данным x1c, x2c, счисление ортодромических координат x0, x0 ([1], стр. 249-254, стр. 467, стр. 255-258), формирование составляющих путевой скорости в осях летательного аппарата

соответственно с погрешностью
δ1= δ•v2л, δ2= -δ•v1л,
а так как δ ≈ 0,1Δψ, то погрешности δ1, δ2 значительно меньше, чем в ближайшем аналоге.
С третьего выхода БФНП 1 вычисленные координаты и составляющие скорости выдаются потребителям - в системы индикации, управления, наведения, прицеливания.
Дополнительные блоки и связи обеспечивают значительное уменьшение погрешностей параметров движения летательных аппаратов и, как следствие этого, повышение эффективности их применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВИГАЦИИ | 2000 |
|
RU2168703C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ФОРМИРОВАНИЯ СОСТАВЛЯЮЩИХ ПУТЕВОЙ СКОРОСТИ | 2000 |
|
RU2168153C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2168154C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ | 1992 |
|
RU2042923C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2115890C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
Изобретение относится к авиационному приборостроению и может быть использовано в составе бортового оборудования летательных аппаратов для решения задач наведения, прицеливания и применения боевых средств. Предлагаемая система содержит инерциальный датчик скорости и курса, корректирующий фильтр, спутниковый датчик скорости и координат, а также блок формирования навигационных параметров. В систему дополнительно введены последовательно включенные между указанными инерциальным датчиком и фильтром блок запоминания и блок формирования погрешности географического курса. Эти блоки обеспечивают повышение точностных характеристик системы по курсу и по составляющим скорости. Изобретение способствует повышению боевой эффективности применения летательных аппаратов, оснащенных предлагаемой комплексной системой. 1 ил.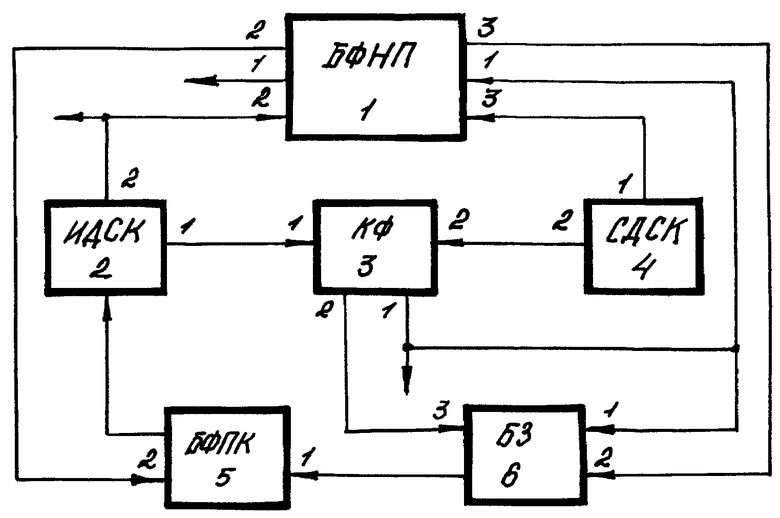
Комплексная навигационная система, содержащая спутниковый датчик скорости и координат, последовательно соединенные инерциальный датчик скорости и курса, корректирующий фильтр, блок формирования навигационных параметров, на второй и третий входы которого подключены соответственно второй выход инерциального датчика скорости и курса и первый выход спутникового датчика скорости и координат, второй выход которого подключен к второму входу корректирующего фильтра, отличающаяся тем, что в нее дополнительно введены включенные между первым выходом корректирующего фильтра и входом инерциального датчика скорости и курса последовательно соединенные блок запоминания и блок формирования погрешности географического курса, на второй вход которого подключен второй выход блока формирования навигационных параметров, третий выход которого подключен к второму входу блока запоминания, на третий вход которого подключен второй выход корректирующего фильтра.
| О.А.Бабич | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, с | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| RU 2071034 C1, 27.12.1996 | |||
| US 5740048 A, 14.04.1998. | |||

