Изобретение относится к области применения авиационных катапультируемых кресел особенно в опасных режимах полета.
Известны системы управления катапультируемыми креслами, описания которых приведены в сборнике [1] "Новости зарубежной науки и техники", серия "Авиационная и ракетная техника", ЦАГИ, N 20, 1986 г., стр. 3-21; [2] патент США НКИ N 224/122 AE, (N 877200, МПК B 64 D 25/10).
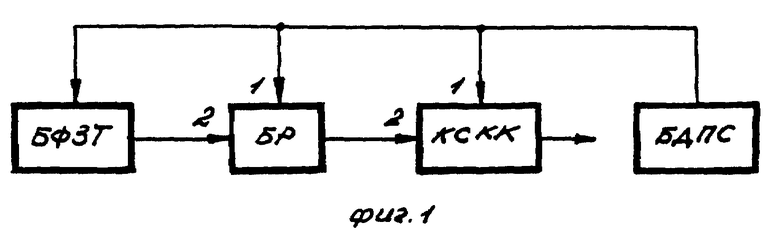
В качестве прототипа выбирается "Адаптивная система управления для аварийных устройств спасения экипажа", заявленная в вышеупомянутом патенте, структурно содержащая (см. фиг. 1) блок формирования заданной траектории (БФЗТ), блок разности (БР), контур стабилизации катапультируемого кресла (КСКК), блок датчиков параметров состояния (БДПС). По поступившим с выхода БДПС на вход БФЗТ данных о начальных условиях катапультирования, с учетом допустимых ограничений по перегрузкам, опасного сближения с землей, наискорейшего ухода из-под самолета при полете в перевернутом состоянии, в БФЗТ формируется сигнал заданной траектории движения по координатам во времени X3(t), поступающий на второй вход БР, на первый вход которого с выхода БДПС поступают сигналы параметров состояния  В БР формируется сигнал отклонения
В БР формируется сигнал отклонения  (здесь T1, T2 - постоянные времени), поступающий на второй вход КСКК, на первый вход которого поступают стабилизирующие сигналы (углы и угловые скорости эволюций кресла). КСКК с учетом стабилизирующих сигналов имеет по выходу X, например, передаточную функцию
(здесь T1, T2 - постоянные времени), поступающий на второй вход КСКК, на первый вход которого поступают стабилизирующие сигналы (углы и угловые скорости эволюций кресла). КСКК с учетом стабилизирующих сигналов имеет по выходу X, например, передаточную функцию  (здесь r1, r2, r0 - степенные полиномы оператора дифференцирования P), тогда δ = roxp2 и, например, при
(здесь r1, r2, r0 - степенные полиномы оператора дифференцирования P), тогда δ = roxp2 и, например, при
ro= τ
x[1+T1p+(T
откуда следует, что невозможно обеспечить оптимальное качество управления выбором двух параметров (T1, T2) из четырех (обеспечивается субоптимальное управление) и X3(t) отрабатывается с погрешностью  существенно искажающей заданную траекторию движения, что является недостатком прототипа, так как эти отклонения могут привести к опасному сближению с землей или к столкновению с самолетом.
существенно искажающей заданную траекторию движения, что является недостатком прототипа, так как эти отклонения могут привести к опасному сближению с землей или к столкновению с самолетом.
Техническим результатом, достигаемым при использовании предлагаемого технического решения, является обеспечение оптимального качества управления и повышение точности выдерживания заданной траектории движения и, как следствие этого, повышение безопасности спасения членов экипажа.
Достигается технический результат тем, что в систему управления катапультируемым креслом спасения экипажа, содержащую блок формирования заданной траектории, блок разности и контур стабилизации катапультируемого кресла, а также блок датчиков параметров состояния, выход которого подключен ко входу блока формирования заданной траектории и к первым входа блока разности и контура стабилизации катапультируемого кресла дополнительно введены, включенный между выходом блока формирования заданной траектории и вторым входом блока разности, блок формирования комплексного сигнала управления, и, включенный между выходом блока разности и вторым входом контура стабилизации катапультируемого кресла, корректирующий фильтр системы.
На фиг. 1 представлена блок-схема прототипа, обозначения блоков на которой приведены выше.
На фиг. 2 представлена блок-схема предлагаемой системы, содержащей:
1 - блок формирования заданной траектории БФЗТ;
2 - блок формирования комплексного сигнала управления БФКСУ;
3 - блок разности БР;
4 - блок датчиков параметров состояния БДПС;
5 - контур стабилизации катапультируемого кресла КСКК;
6 - корректирующий фильтр системы КФС.
Система работает следующим образом.
БДПС4 (до катапультирования это могут быть бортовые датчики) измеряет параметры состояния, например, координаты, скорости и ускорения движения по трем осям, углы и угловые скорости эволюций, данные параметры с выхода БДПС4 поступают на вход БФЗТ1, на первые входы КСКК5 и БРЗ, на второй вход которого с выхода БФКСУ2 поступает заданный комплексный сигнал управления XЗУ(t), в БРЗ формируется разностный сигнал δ = (XЗУ - X•r), где X•r - сигнал поступивший на первый вход БРЗ, например,
где T1, T2 - постоянные времени.
КФС6 реализован, например, на линейном фильтре с передаточной функцией 
где Q1, Q2 - степенные полиномы оператора дифференцирования P.
Пример технической реализации приведен в книге [3] И.М.Тетельбаума, Ю.Р. Шнейдера "400 схем для АВМ", Москва, Энергия, 1978 г., стр. 10.
В КФС6 формируется сигнал управления  поступающий на второй вход КСК, являющегося застабилизированным по углам и угловым скоростям эволюций катапультным креслом с двигательной установкой (см. [2]), развивающим ускорение движения
поступающий на второй вход КСК, являющегося застабилизированным по углам и угловым скоростям эволюций катапультным креслом с двигательной установкой (см. [2]), развивающим ускорение движения  в соответствии с входным сигналом
в соответствии с входным сигналом  (здесь R1, R2 - степенные полиномы оператора P, при этом степень R1, меньше степени R2), тогда
(здесь R1, R2 - степенные полиномы оператора P, при этом степень R1, меньше степени R2), тогда
При выборе физически реализуемых  где R0 - полином степени (n - 2), равной разности степеней полиномов R2 и R1, Ro= τ
где R0 - полином степени (n - 2), равной разности степеней полиномов R2 и R1, Ro= τ
x(p2R0 + r) = xR = xЗУ,
R = 1+T1p+(τ
где все параметры T1, T2, τ2 , T3, ..., T являются изменяемыми, поэтому их выбором (см. [4] книгу Н.Т.Кузовкова "Модальное управление и наблюдающие устройства", Москва, Машиностроение, 1976 г.) обеспечивается, в отличие от прототипа, оптимальное количество управления.
В БФЗТ1 в соответствии с начальными параметрами состояния формируется заданная траектория координат движения во времени:
x3(t) = a0 + a1t + ... + aktk,
(здесь a0, ..., ak - постоянные коэффициенты) и все производные, включая n-ую при K > n = a1 + 2a2t + ... + ak • k • tk-1,
= a1 + 2a2t + ... + ak • k • tk-1, = 2a2 + 6a3t + ... + ak (k-1) • ktk-2,
= 2a2 + 6a3t + ... + ak (k-1) • ktk-2, = an • n! + ... + ak • k(k-1) ... (k-n+1)tk-n,
= an • n! + ... + ak • k(k-1) ... (k-n+1)tk-n,
которые с выхода БФЗТ1 поступают на вход БФКСУ2, являющегося арифметическим устройством (см. книгу [5] Преснухина Л.Н. Нестерова П.В. "Цифровые вычислительные машины", Москва, Высшая школа, 1981 г., стр. 327), выполняющим операции перемножения поступивших сигналов на коэффициенты
b0,...,bn x3(t) • b0, 
и суммирование
тогда xR = x3R3 и, соответственно, при b0 = 1, b1 = T1, b2= τ
т. е. в отличие от прототипа траектория движения по координатам точно приходит по заданной траектории, что свидетельствует о достижении технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ КАТАПУЛЬТИРУЕМЫМ КРЕСЛОМ СПАСЕНИЯ ЭКИПАЖА | 1999 |
|
RU2149804C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1994 |
|
RU2081396C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2096263C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ПРИ ПОСАДКЕ | 1996 |
|
RU2102281C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2079108C1 |
| СИСТЕМА ПЛАНИРОВАНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ТАКТИЧЕСКОЙ ГРУППЫ САМОЛЕТОВ | 1999 |
|
RU2147141C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2147009C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ | 1992 |
|
RU2042923C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1996 |
|
RU2093420C1 |
Изобретение относится к оборудованию катапультируемых средств спасения экипажа. Система содержит последовательно соединенные блок датчиков параметров состояния, блок разности, контур стабилизации катапультируемого кресла и блок формирования заданной траектории. Для обеспечения оптимального качества управления и точного отслеживания заданных пространственно-временных траекторий в систему дополнительно введены корректирующий фильтр системы и блок формирования комплексного сигнала управления. Предложенное техническое решение повышает безопасность спасения членов экипажа. Особенно оно эффективно в опасных режимах катапультирования. 2 ил.
Система управления катапультируемым креслом спасения экипажа, содержащая последовательно соединенные блок датчиков параметров состояния и блок формирования заданной траектории, блок разности и контур стабилизации катапультируемого кресла, первые входы которых подключены к выходу блока датчиков параметров состояния, отличающаяся тем, что в нее дополнительно введены включенный между выходом блока формирования заданной траектории и вторым входом блока разности блок формирования комплексного сигнала управления и включенный между выходом блока разности и вторым входом контура стабилизации катапультируемого кресла корректирующий фильтр.
| US 4846421 A, 11.07.89 | |||
| US 4216928 A, 07.09.76 | |||
| КАТАПУЛЬТНОЕ КРЕСЛО | 1997 |
|
RU2116938C1 |
| КАТАПУЛЬТНОЕ КРЕСЛО | 1989 |
|
SU1760731A1 |

