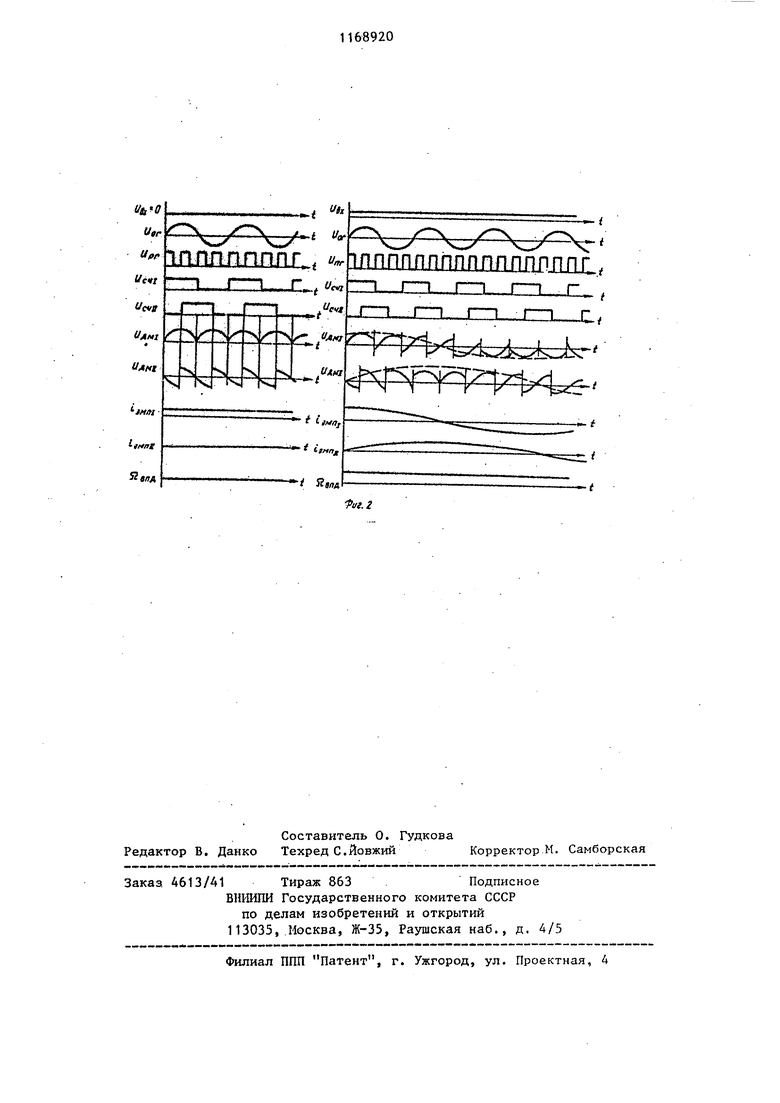
Изобретение относится к машиностроению и может быть использовано в различных системах автоматического управления, в том числе в промышленных роботах и манипуляторах. Цель изабретеиия - повышение точности позиционирования устройства. На фиг. 1 представлена функциональная схема пневмо(гидро)привода; на фиг.2 - эпюры параметров в контрольных точках схемы. Обозначения, принятые на фиг, 1 и 2: и5 - управляющее воздействие, U0r - выходной сигнал генератора опо ной частоты, Upr- - выходной сигнал регулируемого генератора импульсов, Uc4l исцП выходные сигналы счетчика ,11 ,fr выходные сигна:шдемодуля торов, и;|,ифц- выходные сигналы фильтров, , иэ,„„,Т7 токи в обмотках электромеханических преобразователей, угловое перемещени выходного вала пневмо(гидро)привода Qj,- угловая скорость вращения вы ходкого вала пневмо(гидро)привода. Входным устройством привода явля ется -чувствительный элемент 1, например синусно-косинусный вращающий ся Трансформатор или многооборотный потенциометр, выход которого соедимен с входом регулируемого генерато ра 2 импульсов. Последний представляет собой устройство, у которого частота импульсов на выходе изменяе ся относительно начального значения пропорционалыю напряжение на входе Выход регулируемого генератора 2 импульсов подключен к входу ю-разрядного счетчика 3 импульсов Джонса В последнем используется число выходов, равное числу разрядов га. При этом напряжение на каждом выходе представляет собой импульсы одинаковой длительности с относительным фазовым сдвигом /т. Демодулятор 4 представляет собой фазочувствительмый выпрямитель с двумя входами управляющим и входом опорного.напряжения. Каждый выход счетчика 3 импульсов Джонсона подключен к входу опорного напряжения одного из демодуляторов 4. Входы управляющего сигнала демодуляторов 4 соединены с входом синусоидального генератора 5 опорной частоты. Демодулятор 4 с фильтром 6 является входным каскадом усилителя 7. Нагрузкой усилителя 7 является обмотка электро1202 механического преобразователя 8, выполненного в одном корпусе с дроссельным распределительным устройством 9. В качестве распределительного устройства 9 могут быть использованы проточные золотники, струйная трубка или сопло-заслонка. Такие распределительные устройства имеют два противофазных выхода. Каждый выход распределительного устройства 9 соединен каналом с парой диаметрально расположенных цилиндров волнового двигателя 10. Волновой двигатель 10 состоит из гибкого колеса 11, жесткого колеса (не показано) и плунжерного волнообразователя 12. Гибкое и жесткое колеса находятся в зубчатом, фрикционном или резьбовом соединении. Скорость вращения выходного вала волнового двигателя S g, или его угол поворота Vgn зависят от скорости кпн положения суммарного усилия, создаваемого поршнями волнового двигателя, и от передаточного отношения волновой передачи. Усрщие, созда-. ваемое каждым плунжером, представляет собой вектор, модуль которого зависит от величины подаваемого давления распределительного устройства 9,- а направление - от расположения оси щшиндра, в котором перемещается данньй плунжер волнообразователя. Суммарное усилие, создаваемое группой рядом расположенных цилиндров, представляет собой суммарный вектор, определяемый суммой векторов отдельных плунжеров. В плунжерном волнообразователе 12 диаметрально расположенные цилиндры соединены каналами в пары, а взаимноперпендикулярные пары цилиндров под-ключены к разным выходам одного и того же распределителя 9. Число каналов, состоящих из демодулятора 4, фильтра 6, усилителя 7, электромеханического преобразователя 8 с распределительным устройством 9, равно половине числа пар диаметрально расположенных цилиндров в волнообразователе 12. Пневмо(гидро)привод работает следующим образом. При отсутствии входного сигнала с чувствительного элемента 1 частота импульсов регулируемого генератора 2 импульсов в п раз больше частоты синусоидального напряжения опорного генератора 5 (п 2т). Счетчик 3 и пульсов делит частоту регулируемого генератора 2 импульсов на а (на выходах счетчика 3 импульсов Джонса при двухволновой передаче и четырех парах диаметрально расположенных ци линдров волнообразователя 12 формируются импульсы с взаимным фазовым сдвигом Ti 12 (левые эпюры 1|,и U. фиг.2). При этом частота на выходах счетчика 3 импульсов Джонса равна частоте опорного генератора 5, токи в обмотка:х электромеханических преобразователей -3fAnl ( постоянное значение, а следовательно , величины расходов на выходах ; распределителей 9 и усилия, создаваемые каждой диаметрально расположенной парой цилиндров, не изменяются, вектор суммарного усилия и выходной вал неподвижны. ПнеБмо(гиДро)привод может рабо тать как в замкнутойj так и в разомкнутой схеме. В разомкнутой схеме при отсутствии связи между выход ным валом и чувствительным элементо 1 и наличии управляющего воздействи фиксированного уровня, как показано на правой эпюре фиг.2, привод ра ботает следующим образом. Изменяетс частота импульсов на выходе регулируемого генератора 2. Частота импул сов на выходе счетчика 3 импульсов Джонса больше или меньше частоты генератора 5 опорного напряжения. При наличии разности частот сигналов,, поступающих на входы демодулятора 4, на его выходе формируется напряжение, огибающая которого (штриховые линии на эпюрах U . правой части фиг.2) имеет синусридальн форму и частоту, равную разност частот. Максимальная амплитуда огибающей определяется максимальной ам литудой выходного сигнала генератора 5 опорной частоты. Сдвиг фаз меж ду огибающими выходных напряжений 04 демодуляторов 4 определяется значением iJ/m, а чередование фаз (прямое и обратное) - знаком разности частот. Фильтры 6 обеспечивают подавление высокочастотных составляющих выходных напряжений демодуляторов 4. Формы токов в обмотках электромеханических преобразователей 8 (ijMnl. ) соответствуют формам огибающих выходных напряжений демодуляторов 4. Изменение токов в обмотках электрических преобразователей 8 приводит к перемещению дросселей распределителей 9 и соответственно к изменению расходов в цилиндрах волнообразователя 12. Изменение величин усилий плунжеров приводит к изменению положения суьмарного вектора усилия. Направление двихсения суммарного вектора определяется порядком чередования фаз. Скорость движения определяется разностью частот. При постоянной величине сигнала .на чувствительном элементе 1 вектор суммарного усилия, а следовательно, и выходной вал вращаются с постоянными скоростями. Знак скорости определяется знаком входного сигнала, а величина пропорциональна величине сигнала. При подаче входного сигнала в В1ще прямоугольного импульса заданной длительности вектор суммарного усилия и выходной вал повернутся на фиксированные углы. Величина угла поворота выходного вала зависит от длительности входного импульса. По сравнению с известным устройством предложенный пневмо(гидро)привод позволяет осуществлять оста- . нов выходного вала в любом желаемом положении, так как угол останова не зависит от конструктивных параметров волнообразователя (числа цилиндров и угла их взаимного расположения в блоке). Тем самым точность позиционирования существенно повышается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1982 |
|
SU1061104A1 |
| Шаговый привод | 1985 |
|
SU1265406A1 |
| ВОЛНОВОЙ СЕРВОМЕХАНИЗМ СО СТАБИЛИЗАЦИЕЙ ФОРМЫ ВОЛНЫ ДЕФОРМАЦИИ (ВАРИАНТЫ) | 1999 |
|
RU2169298C2 |
| Система для передачи телеметрической информации | 1982 |
|
SU1091208A1 |
| Волновая зубчатая передача | 1973 |
|
SU872871A1 |
| Следящий пневмопривод | 1987 |
|
SU1522150A1 |
| ВОЛНОВОЙ ГАЗОГИДРОДВИГАТЕЛЬ | 2007 |
|
RU2340813C1 |
| Электромагнитный металлоискатель | 1976 |
|
SU646293A1 |
| Волновой сервомеханизм | 1984 |
|
SU1224468A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ФАЗОЧУВСТВИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЕ - КОД | 1992 |
|
RU2094946C1 |
ПНЕВМО(ГИДРОПРИВОД,, содер жащий волновой двигатель с расположенными по окружности 2т цилиндрами чувствительный элемент и m цепочек из последовательно соединенных усилителя, электромеханического преобразователя и распределителя с двумя выходами, причем диаметрально расположенные цилиндры волнового двига теля соединены между собой и образу пару цилиндров, взадаюперпендикулярные из которых соединены с разными выходами одного и того же распределителя, отличающийся тем, что, с целью повышения точности позиционирования, он содержит гп-разрядHbrfi счетчик импульсов Джонса, регулируемый генератор импульсов и синусоидальньш генератор опорной частоты, на входе каждого усилителя в цепочках установлены последовательно соединенные демодулятор с управляющим входом и входом опорного напряжения и фильтр, управляющие входы всех демодуляторов соединены с выходом синусогедального генератора опорной частоты, а вход опорного напряжения каждого демодулятора соединен со своим выходом т-разрядного счетчика импульсов Джонса, вход которого через регулируемый генератор импульсов соединен с выходом чувствительного элемента.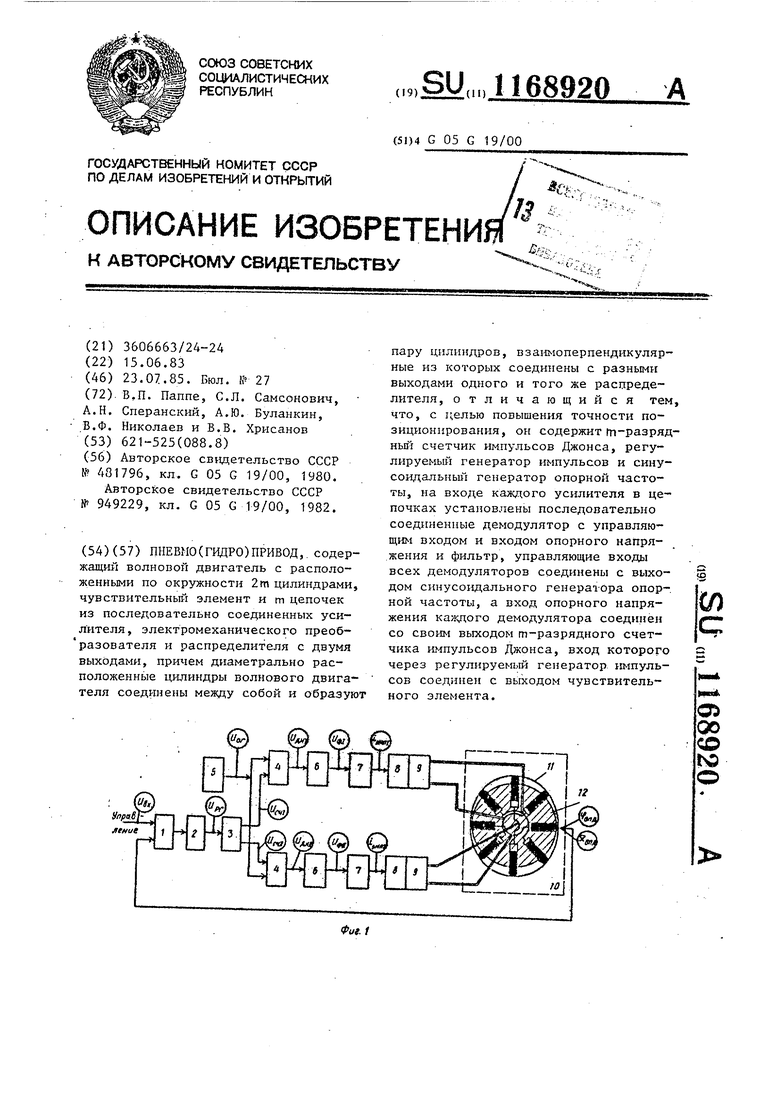
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Дискретный исполнительный механизм | 1980 |
|
SU949229A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
