Изобретение относится к гидро(пневмо)- и электроавтоматике и может быть использовано в гидро-, пневмо- и электроприводах и системах автоматического управления.
Наиболее близким к предлагаемому изобретению является волновой сервомеханизм со стабилизацией формы волны деформации, содержащий гибкое и жесткое колеса волновой передачи и волнообразователь с расположенными равномерно по окружности приводами, включающими исполнительный механизм, распределительное устройство с двумя выходами, связанное через электронный усилитель-сумматор с задатчиком, и датчик деформации гибкого колеса [авторское свидетельство N 1224468].
Недостатком данного механизма является сложность схемы.
Цель изобретения - упрощение схемы волнового сервомеханизма со стабилизацией формы волны деформации.
Цель достигается за счет того, что волновой сервомеханизм со стабилизацией формы волны деформации, содержащий гибкое и жесткое колеса волновой передачи и волнообразователь с расположенными равномерно по окружности приводами, включающими исполнительный механизм, распределительное устройство с двумя выходами, связанное через электронный усилитель-сумматор с задатчиком, и датчик деформации гибкого колеса, исполнительные механизмы выполнены в виде однополостных гидро(пневмо)цилиндров, причем диаметрально расположенные цилиндры соединены каналами, при этом каждая диаметральная пара, образующая одну фазу, и ей перпендикулярная, подключены к разным выходам одного гидро(пневмо)распределительного устройства, датчики деформации гибкого колеса выполнены в виде датчиков положения, число которых соответствует числу пар фаз сервомеханизма и размещены вдоль осей диаметрально расположенных приводов, по одной оси для каждого распределительного устройства, при этом информационная обмотка каждого датчика положения подключена к одному из входов электронного усилителя-сумматора, соответствующему этому распределительному устройству.
Кроме того, цель достигается за счет того, что волновой сервомеханизм со стабилизацией формы волны деформации отличается тем, что датчики деформации гибкого колеса выполнены в виде датчиков давления, подключенных к одной из диаметральных пар приводов каждого распределительного устройства.
Также цель достигается за счет того, что волновой сервомеханизм со стабилизацией формы волны деформации, содержащий гибкое и жесткое колеса волновой передачи и волнообразователь с расположенными равномерно по окружности приводами, включающими исполнительный механизм, токораспределительное устройство с двумя выходами, связанное через электронный усилитель-сумматор с задатчиком, и датчик деформации гибкого колеса, отличается тем, что исполнительные механизмы выполнены электромеханическими, причем диаметрально расположенные электромеханизмы соединены так, что каждая диаметральная пара, образующая одну фазу, и ей перпендикулярная, подключены к разным выходам одного токораспределительного устройства, датчики деформации гибкого колеса выполнены в виде датчиков положения, число которых соответствует числу пар фаз сервомеханизма, размещены вдоль осей диаметрально расположенных приводов, по одной оси для каждого распределительного устройства, при этом информационная обмотка каждого датчика положения подключена к одному из входов электронного усилителя-сумматора, соответствующему этому распределительному устройству.
Также цель достигается за счет того, что волновой сервомеханизм со стабилизацией формы волны деформации отличается тем, что датчики деформации гибкого колеса выполнены в виде датчиков тока, подключенных к одной из диаметральных пар приводов каждого распределительного устройства.
На фиг. 1 изображена схема волнового сервомеханизма со стабилизацией формы волны деформации с датчиками деформации гибкого колеса, выполненными в виде датчиков перемещения.
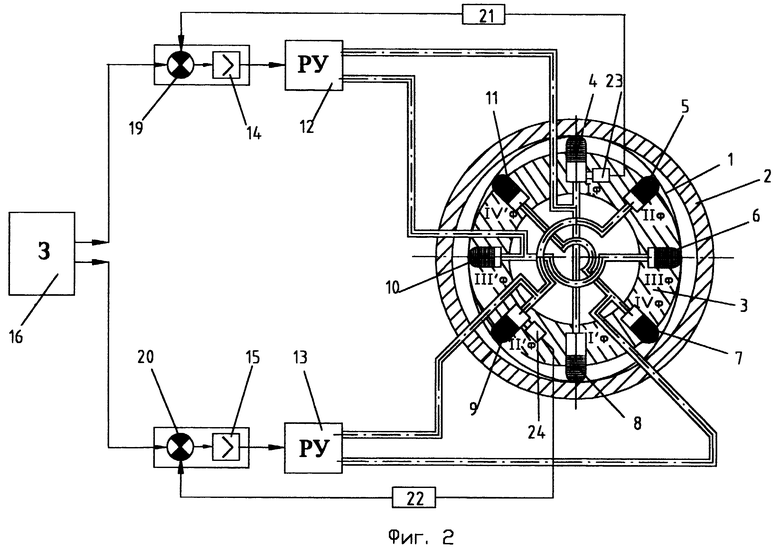
На фиг. 2 изображена схема волнового сервомеханизма сервомеханизма со стабилизацией формы волны деформации с датчиками деформации гибкого колеса, выполненными в виде датчиков давления.
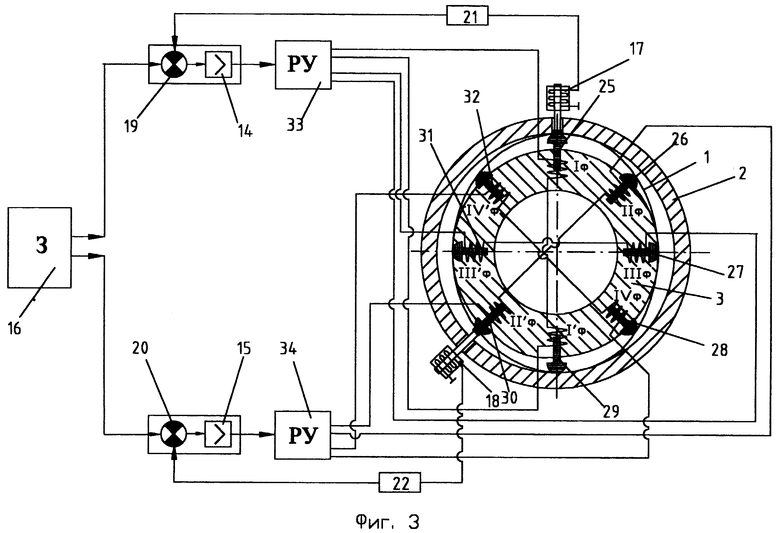
На фиг. 3 изображена схема волнового сервомеханизма со стабилизацией формы волны деформации, исполнительные механизмы в которой выполнены в виде электромеханизмов, датчики деформации гибкого колеса выполнены в виде датчиков перемещения.
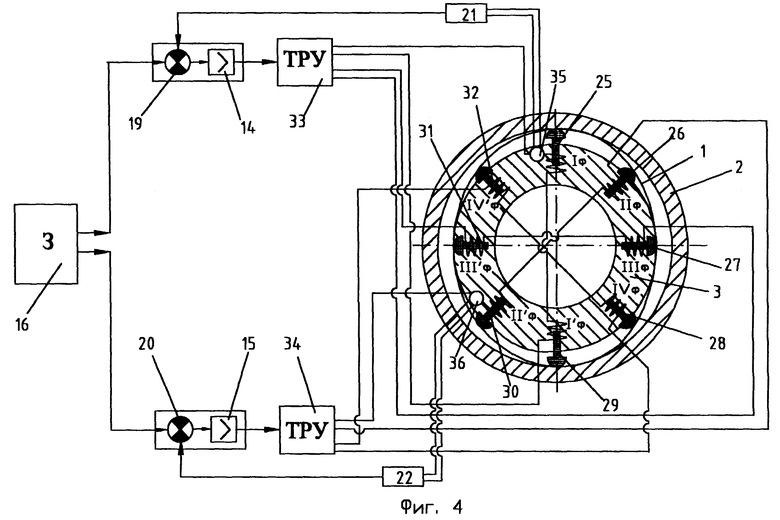
На фиг. 4 изображена схема волнового сервомеханизма со стабилизацией формы волны деформации, исполнительные механизмы в которой выполнены в виде электромеханизмов, датчики деформации гибкого колеса выполнены в виде датчиков тока.
Волновой сервомеханизм со стабилизацией формы волны деформации, изображенный на фиг. 1, содержит гибкое колесо 1 и жесткое колесо 2 волновой передачи и волнообразователь 3, в корпусе которого размещены радиально и равномерно по окружности исполнительные механизмы приводов, выполненные в виде однополостных гидро(пневмо)цилиндров с поршнями 4-11 (однополостные цилиндры не обозначены).
Поршни 4 и 8 образуют I фазу, поршни 5 и 9 - II фазу, поршни 6 и 10 - III фазу, поршни 7 и 11 - IV фазу. Фазы III и IV являются противофазами для I и II фаз соответственно. Число фаз должно быть четным, и количество их не ограничено.
Каждая диаметральная пара поршней 4 и 8, 5 и 9, образующая одну фазу, и ей перпендикулярная 6 и 9, 7 и 11 соответственно, образующая противофазу, подключены к разным выходам одного распределительного устройства 12 и 13 соответственно. Распределительные устройства связаны через электронные усилители 14 и 15 с задатчиком 16. Сервомеханизм снабжен датчиками деформации гибкого колеса 17 и 18, выполненными в виде датчиков перемещения, число которых соответствует числу пар фаз сервомеханизма, размещенных вдоль осей диаметрально расположенных цилиндров, по одной оси для каждого распределительного устройства. При этом информационная обмотка каждого датчика подключена к одному из входов электронного усилителя-сумматора, соответствующему этому распределительному устройству. Обмотки датчиков подключены к сумматорам 19 и 20 через фазочувствительные выпрямители 21 и 22 соответственно.
Волновой сервомеханизм со стабилизацией формы волны деформации, изображенный на фиг. 2, содержит гибкое колесо 1 и жесткое колесо 2 волновой передачи и волнообразователь 3, в корпусе которого размещены радиально и равномерно по окружности исполнительные механизмы приводов, выполненные в виде однополостных гидро(пневмо)цилиндров с поршнями 4-11 (однополостные цилиндры не обозначены).
Поршни 4 и 8 образуют I фазу, поршни 5 и 9 - II фазу, поршни 6 и 10 - III фазу, поршни 7 и 11 - IV фазу. Фазы III и IV являются противофазами для 1 и II фаз соответственно. Число фаз должно быть четным, и количество их не ограничено.
Каждая диаметральная пара поршней 4 и 8, 5 и 9, образующая одну фазу, и ей перпендикулярная 6 и 9, 7 и 11 соответственно, образующая противофазу, подключены к разным выходам одного распределительного устройства 12 и 13 соответственно. Распределительные устройства связаны через электронные усилители 14 и 15 с задатчиком 16. Сервомеханизм снабжен датчиками деформации гибкого колеса 23 и 24, выполненными в виде датчиков давления, подключаемых к каналам, соединяющим диаметрально распoложенные поршни. Число датчиков давления соответствует числу пар фаз сервомеханизма, размещенных вдоль осей диаметрально расположенных цилиндров, по одной оси для каждого распределительного устройства. При этом информационная обмотка каждого датчика подключена к одному из входов электронного усилителя-сумматора, соответствующему этому распределительному устройству. Обмотки датчиков подключены к сумматорам 19 и 20 через фазочувствительные выпрямители 21 и 22 соответственно.
Волновой сервомеханизм со стабилизацией формы волны деформации, изображенный на фиг. 3, содержит гибкое колесо 1 и жесткое колесо 2 волновой передачи и волнообразователь 3, в корпусе которого размещены радиально и равномерно по окружности исполнительные механизмы приводов, выполненные в виде электромеханизмов 25-32.
Электромеханизмы 25 и 29 образуют I фазу, электромеханизмы 26 и 30 - II фазу, электромеханизмы 27 и 31 -III фазу, электромеханизмы 28 и 32 - IV фазу. Фазы III и IV являются противофазами для I и II фаз соответственно. Число фаз должно быть четным, и количество их не ограничено.
Каждая диаметральная пара электромеханизмов 26 и 30, 27 и 31, образующая одну фазу, и ей перпендикулярная 28 и 32, 29 и 33 соответственно, образующая противофазу, подключены к разным выходам одного токораспределительного устройства 34 и 35 соответственно. Токораспределительные устройства связаны через электронные усилители 14 и 15 с задатчиком 16. Сервомеханизм снабжен датчиками деформации гибкого колеса 17 и 18, выполненными в виде датчиков перемещения, число которых соответствует числу пар фаз сервомеханизма, размещенных вдоль осей диаметрально расположенных электромеханизмов, по одной оси для каждого распределительного устройства. При этом информационная обмотка каждого датчика подключена к одному из входов электронного усилителя-сумматора, соответствующему этому токораспределительному устройству. Обмотки датчиков подключены к сумматорам 19 и 20 через фазочувствительные выпрямители 21 и 22 соответственно.
Волновой сервомеханизм со стабилизацией формы волны деформации, изображенный на фиг. 4, содержит гибкое колесо 1 и жесткое колесо 2 волновой передачи и волнообразователь 3, в корпусе которого размещены радиально и равномерно по окружности исполнительные механизмы приводов, выполненные в виде электромеханизмов 25-32.
Электромеханизмы 25 и 29 образуют I фазу, электромеханизмы 26 и 30 - II фазу, электромеханизмы 27 и 31 - III фазу, электромеханизмы 28 и 32 - IV фазу. Фазы III и IV являются противофазами для I и II фаз соответственно. Число фаз должно быть четным, и количество их не ограничено.
Каждая диаметральная пара электромеханизмов 26 и 30, 27 и 31, образующая одну фазу, и ей перпендикулярная 28 и 32, 29 и 33 соответственно, образующая противофазу, подключены к разным выходам одного токораспределительного устройства 34 и 35 соответственно. Токораспределительные устройства связаны через электронные усилители 14 и 15 с задатчиком 16. Сервомеханизм снабжен датчиками деформации гибкого колеса 36 и 37, выполненными в виде датчиков тока, число которых соответствует числу пар фаз сервомеханизма, размещенных вдоль осей диаметрально расположенных электромеханизмов, по одной оси для каждого распределительного устройства. При этом информационная обмотка каждого датчика подключена к одному из входов электронного усилителя-сумматора, соответствующему этому токораспределительному устройству. Обмотки датчиков подключены к сумматорам 19 и 20 через фазочувствительные выпрямители 21 и 22 соответственно.
Волновые сервомеханизмы со стабилизацией формы волны деформации, изображенные на фиг. 1 и 2, работают следующим образом.
Задатчиком 16 вырабатываются гармонические сигналы, сдвинутые друг относительно друга на угол 2πu/z, где z - число исполнительных механизмов (пневмо(гидро)цилиндров, электромеханизмов), u - число волн деформации. При z=8 и u=2 этот угол составляет 90o. Сигналы задатчика поступают на входы сумматоров 19 и 20. Сигналы с выходов сумматоров 19 и 20, проходя через усилители 14 и 15, поступают на распределительные устройства 12 и 13. Распределительное устройство 12 формирует перепад давления между цилиндрами 4, 8 (I фаза) и цилиндрами 6, 10 (III фаза). При этом поршни цилиндров, соответствующих 1 и III фазе, перемещаются в противоположных направлениях, передеформируя гибкое колесо 1. Аналогично со сдвигом по фазе, равным углу 2πu/z, работают цилиндры, соответствующие II и IV фазе, подключенные к выходам распределительного устройства 13. В результате волна деформации гибкого колеса 1 плавно перемещается по окружности.
Измерение положения волны деформации в волновом механизме, изображенном на фиг. 1, осуществляется датчиками положения 17 и 18, сигналы с которых через фазочувствительные выпрямители 21 и 22 подаются на сумматоры 19 и 20 соответственно, где сравниваются с сигналом, поступающим с задатчика 16.
Измерение положения волны деформации в волновом механизме, изображенном на фиг. 2, осуществляется датчиками давления 23 и 24, сигналы с которых через фазочувствительные выпрямители 21 и 22 подаются на сумматоры 19 и 20 соответственно, где сравниваются с сигналом, поступающим с задатчика 16.
Сигнал рассогласования, проходя через усилители 14 и 15, подается на соответствующие распределительные устройства 12 и 13, формирующие перепад давления, под действием которого поршни передеформируют гибкое колесо, устраняя погрешности формы волны деформации и обеспечивая точную отработку сигнала задатчика.
Волновые сервомеханизмы со стабилизацией формы волны деформации, изображенные на фиг. 3 и 4, работают следующим образом.
Задатчиком 16 вырабатываются гармонические сигналы, сдвинутые друг относительно друга на угол 2πu/z, где z - число электромеханизмов, u - число волн деформации. При z=8 и u=2 этот угол составляет 90o. Сигналы задатчика поступают на входы сумматоров 19 и 20. Сигналы с выходов сумматоров 19 и 20, проходя через усилители 14 и 15, поступают на токораспределительные устройства 34 и 35. Токораспределительное устройство 34 формирует разность токов между электромеханизмами 26, 30 (I фаза) и электромеханизмами 28, 32 (III фаза). При этом усилия, создаваемые электромеханизмами, соответствующими I и III фазе, действуют в противоположных направлениях, передеформируя гибкое колесо 1. Аналогично со сдвигом по фазе, равным углу 2πu/z, работают электромеханизмы, соответствующие II и IV фазе, подключенные к выходам токораспределительного устройства 35. В результате волна деформации гибкого колеса 1 плавно перемещается по окружности.
Измерение положения волны деформации волнового сервомеханизма, изображенного на фиг. 3, осуществляется датчиками положения 17 и 18, сигналы с которых через фазочувствительные выпрямители 21 и 22 подаются на сумматоры 19 и 20 соответственно, где сравниваются с сигналом, поступающим с задатчика 16.
Измерение положения волны деформации волнового сервомеханизма, изображенного на фиг. 4. осуществляется датчиками тока 36 и 37, сигналы с которых через фазочувствительные выпрямители 21 и 22 подаются на сумматоры 19 и 20 соответственно, где сравниваются с сигналом, поступающим с задатчика 16.
Сигнал рассогласования, проходя через усилители 14 и 15, подается на соответствующие распределительные устройства 34 и 35, формирующие разность токов, под действием которых электромеханизмы передеформируют гибкое колесо, устраняя погрешности формы волны деформации и обеспечивая точную отработку сигнала задатчика.
По сравнению с прототипом предлагаемое изобретение позволяет упростить схему без уменьшения потери точности отработки заданного сигнала за счет использования одного распределительного устройства для исполнительных механизмов, расположенных по двум диаметральным осям, и одного датчика деформации, расположенного вдоль одной из этих осей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновой сервомеханизм | 1984 |
|
SU1224468A1 |
| ВОЛНОВОЙ СЕРВОМЕХАНИЗМ | 1991 |
|
RU2011062C1 |
| Пневмо/гидро/привод | 1983 |
|
SU1168920A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ НА ОСНОВЕ ВОЛНОВОЙ ПЕРЕДАЧИ ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2003 |
|
RU2265146C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ НА ОСНОВЕ ВОЛНОВОЙ ПЕРЕДАЧИ ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2004 |
|
RU2265147C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ НА ОСНОВЕ ВОЛНОВОЙ ПЕРЕДАЧИ | 2003 |
|
RU2253775C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1996 |
|
RU2102282C1 |
| Следящий привод | 1982 |
|
SU1061104A1 |
| Волновая зубчатая передача | 1973 |
|
SU872871A1 |
| ВОЛНОВОЙ ГИДРОДВИГАТЕЛЬ | 1993 |
|
RU2056554C1 |
Изобретение предназначено для использования в гидро-, пневмо- и электроприводах и системах автоматического управления. Сервомеханизм со стабилизацией формы волны деформации содержит гибкое колесо, жесткое колесо и волнообразователь, в корпусе которого размещены поршни. Каждая диаметральная пара поршней, образующая одну фазу, и ей перпендикулярная, соответственно, образующая противофазу, подключены к разным выходам одного распределительного устройства соответственно. Гидро(пневмо)распределительные устройства связаны через электронные усилители с задатчиком. Сервомеханизм снабжен датчиками деформации гибкого колеса, выполненными в виде датчиков положения, число которых соответствует числу пар фаз сервомеханизма. Обмотки датчиков подключены к сумматорам через фазочувствительные выпрямители соответственно. В качестве датчиков деформации гибкого колеса могут использоваться датчики давления. В волновом сервомеханизме с токораспределительными устройствами в качестве датчиков деформации гибкого колеса могут использоваться датчики перемещения или датчики тока. Технический результат - упрощение схемы волнового сервомеханизма со стабилизацией формы волны деформации. 2 с. и 2 з.п. ф-лы, 4 ил.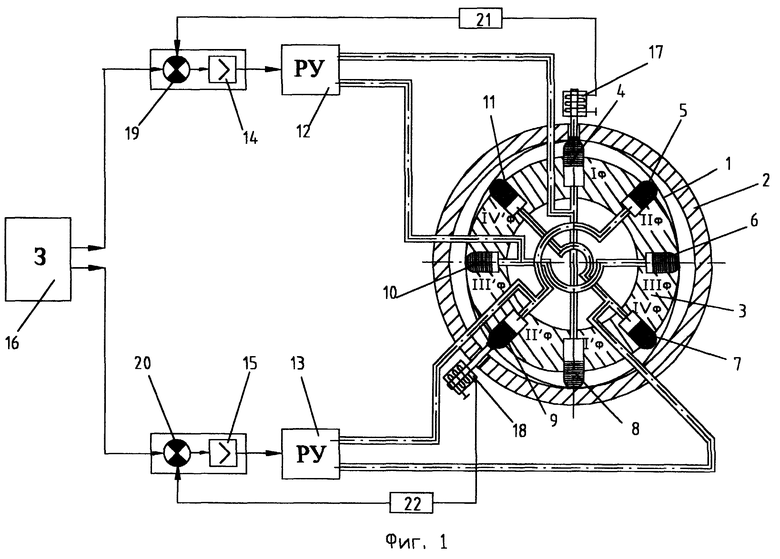
| Волновой сервомеханизм | 1984 |
|
SU1224468A1 |
| ВОЛНОВОЙ СЕРВОМЕХАНИЗМ | 1991 |
|
RU2011062C1 |
| DE 1200632 A, 09.09.1965 | |||
| DE 1952791 A, 15.07.1971 | |||
| СЛЕДЯЩИЙ ГИДРОПРИВОД | 1991 |
|
RU2005921C1 |
| US 5775178 A, 07.07.1998. | |||

