(54) ДИСКРЕТНЫЙ ИСПОЛНИТЕЛЬНЫЙ
1
Изобретение относится к электрогидравлическим исполнительным механизмам и может быть использовано в качестве силового привода в системах автоматического управления с цифровыми вычислительными машинами, в том числе на станочных линиях, производственных установках и других областях гидроавтоматики.
Известен дискретный исполнительный механизм, содержащий корпус с установленными в нем гибким колесом и жестким колесом, связанным с выходным валом, электрогидравлический генератор волн деформации, включающий корпус и расположенные в нем порщни, установленные с возможностью- взаимодействия с гибким колесом, рабочие каналы, канал подвода и закрепленные на корпусе электрогидравлические дискретные преобразователи 1.
Недостатками известного исполнительното механизма являются низкая надежность и ограниченная область применения из-за того, что при отсутствии электрического и гидравлического питания выходной вал механизма не имеет строго фиксированного нулевого положения и может проворачиМЕХАНИЗМ
ваться от случайных возмущений. Кроме тоТо, этот механизм имеет большие утечки, так как количество дискретных электрогидравлических преобразователей равно количеству исполнительных элементов, и выпол нены они на базе шариковых клапанов, большое, количество преобразователей ведет к большим утечкам.
Цель изобретения - повышение надежности и расширение области применения, а также упрощение конструкции и повышение энергетических характеристик.
Поставленная цель достигается тем, что дискретный исполнительный механизм снабжен фиксируюшим устройством, выполненным в виде осевого канала в корпусе генератора, сообщенного с каналом подвода, установленного в осевом канале поршня, подпружиненного кулачка, кинематически связанного с поршнем, и двух диаметрально расположенных толкателей, одним концом взаимодействующих с кулачком, а другим -с гибким колесом.
Кроме того, электрогидравлические преобразователи выполнены в виде четырехкромочных золотников, установленных на упругом подвесе.
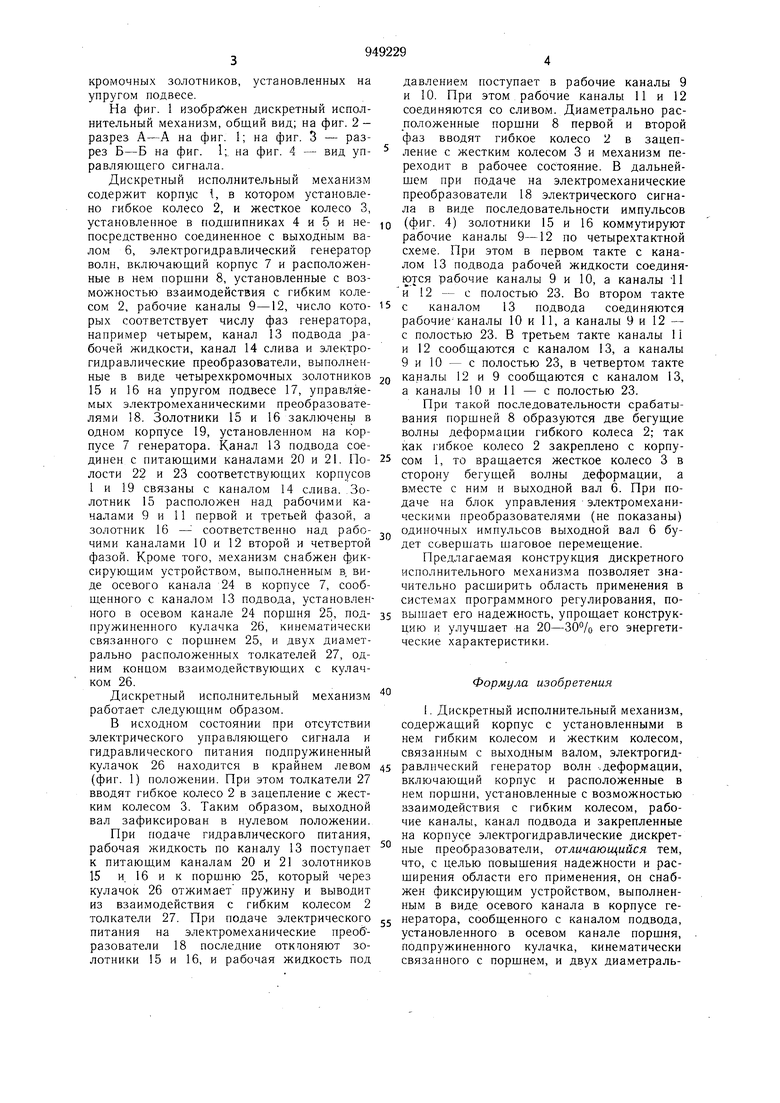
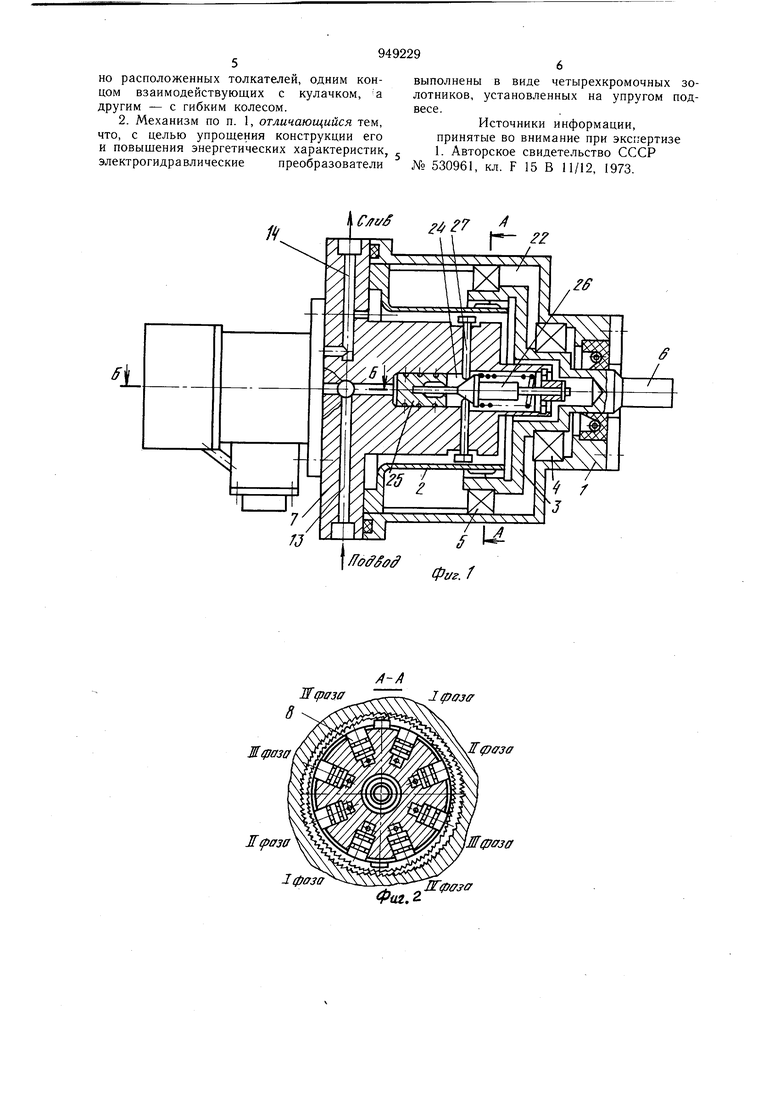
На фиг. 1 изображен дискретный исполнительный механизм, общий вид; на фиг. 2разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1;, на фиг. 4 - вид управляющего сигнала.
Дискретный исполнительный механизм содержит корпус , в котором установлено гибкое колесо 2, и жесткое колесо 3, установленное в подшипниках 4 и 5 и непосредственно соединенное с выходным валом 6, электрогидравлический генератор волн, включающий корпус 7 и расположенные в нем поршни 8, установленные с возможностью взаимодействия с гибким колесом 2, рабочие каналы 9-12, число которых соответствует числу фаз генератора, например четырем, канал 13 подвода рабочей жидкости, канал 14 слива и электрогидравлические преобразователи, выполненные в виде четырехкромочных золотников 15 и 16 на упругом подвесе 17, управляемых электромеханическими преобразователями 18. Золотники 15 и 16 заключень в одном корпусе 19, установленном на корпусе 7 генератора. Канал 13 подвода соединен с питающими каналами 20 и 21. Полости 22 и 23 соответствующих корпусов 1 и 19 связаны с каналом 14 слива. .Золотник 15 расположен над рабочими каналами 9 и 11 первой и третьей фазой, а золотник 16 - соответственно над рабочими каналами 10 и 12 второй и четвертой фазой. Кроме того, механизм снабжен фиксирующим устройством, выполненным в, виде осевого канала 24 в корпусе 7, сообщенного с каналом 13 подвода, установленного в осевом канале 24 поршня 25, подпружиненного кулачка 26, кинематически связанного с поршнем 25, и двух диаметрально расположенных толкателей 27, одним концом взаимодействующих с кулачком 26.
Дискретный исполнительный механизм работает следующим образом.
В исходном состоянии при отсутствии электрического управляющего сигнала и гидравлического питания подпружиненный кулачок 26 находится в крайнем левом (фиг. 1) положении. При этом толкатели 27 вводят гибкое колесо 2 в зацепление с жестким колесом 3. Таким образом, выходной вал зафиксирован в нулевом положении.
При подаче гидравлического питания, рабочая жидкость по каналу 13 поступает к питающим каналам 20 и 21 золотников 15 и. 16 и к порщню 25, который через кулачок 26 отжимает пружину и выводит из взаимодействия с гибким колесом 2 толкатели 27. При подаче электрического питания на электромеханические преобразователи 18 последние откчоняют золотники 15 и 16, и рабочая жидкость под
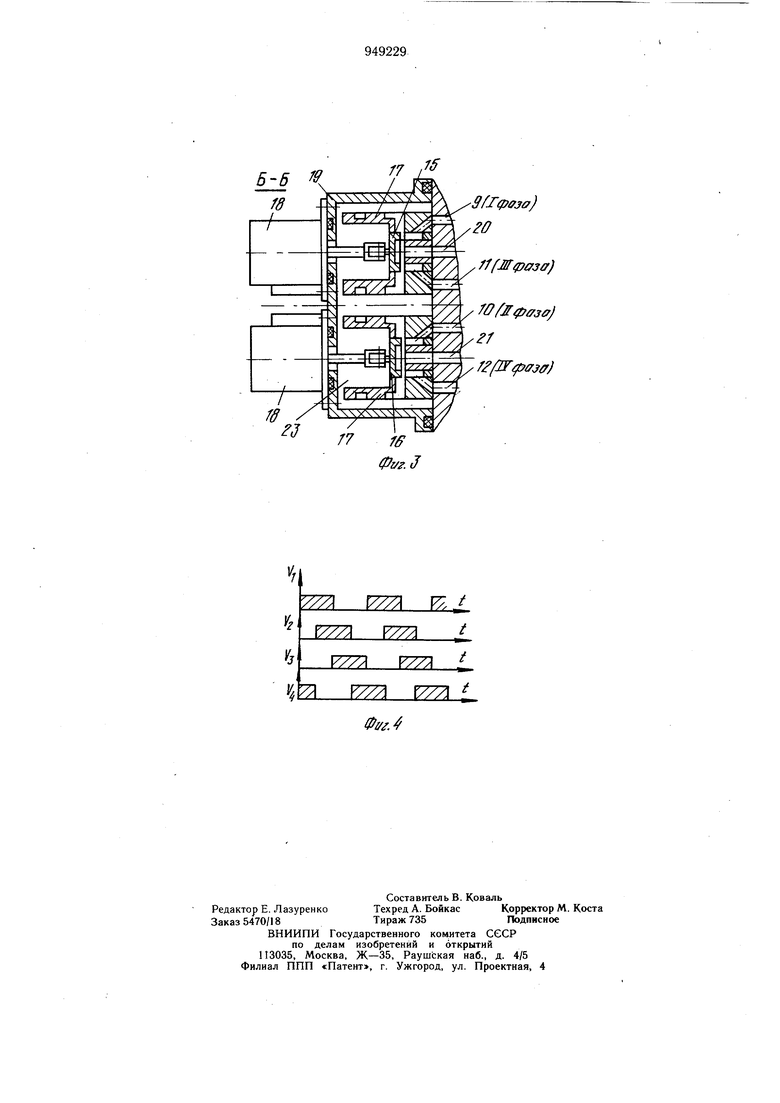
давлением поступает в рабочие каналы 9 и 10. При этом рабочие каналы 11 и 12 соединяются со сливом. Диаметрально расположенные поршни 8 первой и второй фаз вводят гибкое колесо 2 в зацепление с жестким колесом 3 и механизм переходит в рабочее состояние. В дальнейшем при подаче на электромеханические преобразователи 18 электрического сигнала в виде последовательности импульсов (фиг. 4) золотники 15 и 16 коммутируют рабочие каналы 9-12 по четырехтактной схе.ме. При этом в первом такте с каналом 13 подвода рабочей жидкости соединяются рабочие каналы 9 и 10, а каналы il и 12 - с полостью 23. Во втором такте с каналом 13 подвода соединяются рабочиеканалы 10 и 11, а каналы 9 и 12 - с полостью 23. В третьем такте каналы 11 и 12 сообщаются с каналом 13, а каналы 9 и 10 - с полостью 23, в четвертом такте каналы 12 и 9 сообщаются с каналом 13, а каналы 10 и 11 - с полостью 23.
При такой последовательности срабатывания порщней 8 образуются две бегущие волны деформации гибкого колеса 2; так как гибкое колесо 2 закреплено с корпусом 1, то вращается жесткое колесо 3 в сторону бегущей волны деформации, а вместе с ним и выходной вал 6. При подаче на блок управления электромеханическими преобразователями (не показаны) одиночных импульсов выходной вал 6 будет совершать шаговое перемещение.
Предлагаемая конструкция дискретного исполнительного механизма позволяет значительно расширить область применения в системах программного регулирования, повышает его надежность, упрощает конструкцию и улучшает на 20-30% его энергетические характеристики.
Формула изобретения
1. Дискретный исполнительный механизм, содержащий корпус с установленными в нем гибким колесом и жестким колесом, связанным с выходным валом, электрогидравлнческий генератор волн -.деформации, включающий корпус и расположенные в нем поршни, установленные с возможностью взаимодействия с гибким колесом, рабочие каналы, канал подвода и закрепленные на корпусе электрогидравлические дискретные преобразователи, отличающийся тем, что, с целью повышения надежности и расширения области его применения, он снабжен фиксирующим устройством, выполненным в виде осевого канала в корпусе генератора, сообщенного с каналом подвода, установленного в осевом канале порщня, подпружиненного кулачка, кинематически связанного с поршнем, и двух диаметрально расположенных толкателей, одним концом взаимодействующих с кулачком, -а другим - с гибким колесом.
2. Механизм по п. 1, отличающийся тем, что, с целью упрощения конструкции его и повышения энергетических характеристик, электрогидравлические преобразователи
выполнены в виде четырехкромочных золотников, установленных на упругом подвесе.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 530961, кл. F 15 В 11/12, 1973.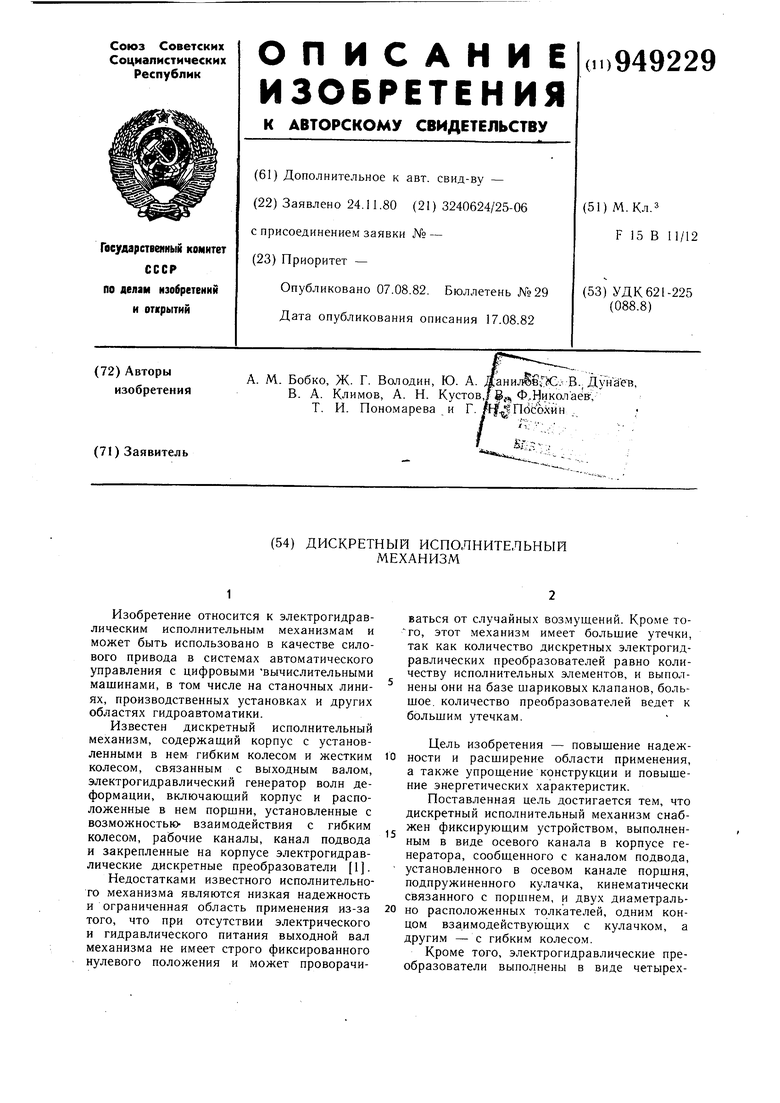
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический шаговый привод | 1983 |
|
SU1138551A1 |
| Электрогидравлический усилитель | 1985 |
|
SU1281763A1 |
| Гидравлический исполнительный механизм | 1981 |
|
SU1055903A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСКРЕТНЫЙ ПОВОРОТНЫЙ ПРИВОД | 2016 |
|
RU2642010C1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| СЕРВОКЛАПАН СО СТРУЙНЫМ УПРАВЛЕНИЕМ | 2011 |
|
RU2482341C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ И ЗАЩИТЫ ПАРОВОЙ ТУРБИНЫ | 2010 |
|
RU2450128C1 |
| Гидравлический привод | 1989 |
|
SU1672010A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ СО СТРУЙНЫМ УСИЛИТЕЛЕМ В ПЕРВОМ КАСКАДЕ | 2015 |
|
RU2594094C1 |
(Роза ., J ffjff Г г ffoff ff 42W. /
А-А
S ffyff
Фт. /
/ WZ V/.A
.-dfTt ffsa)
20 fffM ff3ff)
ffffl ffsaj
r pr ffjff)
