Изобретение относится к гидропневмоавтоматике и может быть использовано в гидроприводах и системах автоматического управления.
Цель изобретения - повышение плавности и точности отработки.
На чертеже изображена схема волнового сервомеханизма.
Сервомеханизм содержит гибкое и жесткое зубчатые колеса 1 и 2 соответственно и волнообразователь 3, в корпусе 4 которого размещены радиально и равномерно по окружности приводные двухпо- лостные цилиндры 5-12, их штоки (из которых изображен шток 13 цилиндра 5) взаимодействуют с колесом 1, а полости (не обозначены) соединены с распределителями 14-21, а также электромеханические преобразователи 22-29 для управления распределителями 14-21, связанные через усилители, (из которых изображен усилитель 3Q) с задатчиком (не изображен). Сервомеханизм снабжен сравниваюшими сумматорами по числу цилиндров (изображен только сравнивающий сумматор 31). Цилиндры 5-12 снабжены электрическими датчиками положения, из которых изображен датчик 32, якорь 33 которого соединен со штоком 13, статор 34 закреплен в корпусе 4, а обмотка 35 подключена к одному из входов сумматора 31, другой вход которого подключен к задатчику, а выход через усилитель 30 - к электромеханическому преобразователю 22. Каждая пара противоположно расположенных цилиндров 5 и 9, 6 и 10, 7 и 11, 8 и 12 образует одну фазу, поэтому входы соответствующих сумматоров объединены, входы сумматоров перпендикулярно расположенных цилиндров 5 и 7, 11 соединены через инвертор 36, а цилиндров 6 и 8, 12 соединены через инвертор 37. Датчики подключены к генератору 38 опорного напряжения. Обмотки датчиков подключены к сумматорам через
фазочувствительные выпрямители 39-46. Цилиндры 5 и 9 образуют I фазу, цилиндры 6 и 10 - II фазу, цилиндры 7 и 11 - III фазу, цилиндры 8 и 12 - IV фазу.
Волновой сервомеханизм работает следующим образом.
В режиме аналогового управления при подаче от задатчика синусоидальных сигналов, сдвинутых друг относительно друга на четверть периода, на входы сумматоров
I и II фаз сигналы рассогласования поступают на электромеханические преобразователи 22, 26, и 23, 27. В свою очередь распределители 14, 18 и 15, 19 в соответствии со знаком сигнала рассогласования формируют перепад давления в полостях цилиндров 5, 9 и 6, 10, штоки которых деформируют гибкое колесо 1, обеспечивая зацепление зубчатых колес 1 и 2. Одновременно штоки цилиндров 7, 8, 11 и 12 III и IV фаз перемещаются в противоположных направлениях, так как сигналы на их сравнивающие сумматоры поступают через инверторы 36 и 37. В результате волна деформации плавно перемещается по окружности гибкого колеса 1, а измерение сигнала рассогласования каждого цилиндра обеспечивает точную отработку сигнала задатчика за счет регулирования хода и усилия штока каждого цилиндра. В режиме дискретного управления амплитуда деформации гибкого колеса 1 в каждои фазе изменяется дискретно, позволяя получить дискретное перемещение на выходе сервомеханизма.
В этом случае синусоидальный (или другой сигнал) аппроксимируется многосту- пенчатой функцией.
Использование данного изобретения в гидроприводах летательных аппаратов позволяет повысить плавность и точность отработки управляющих сигналов и тем самым увеличить эффективность их использования.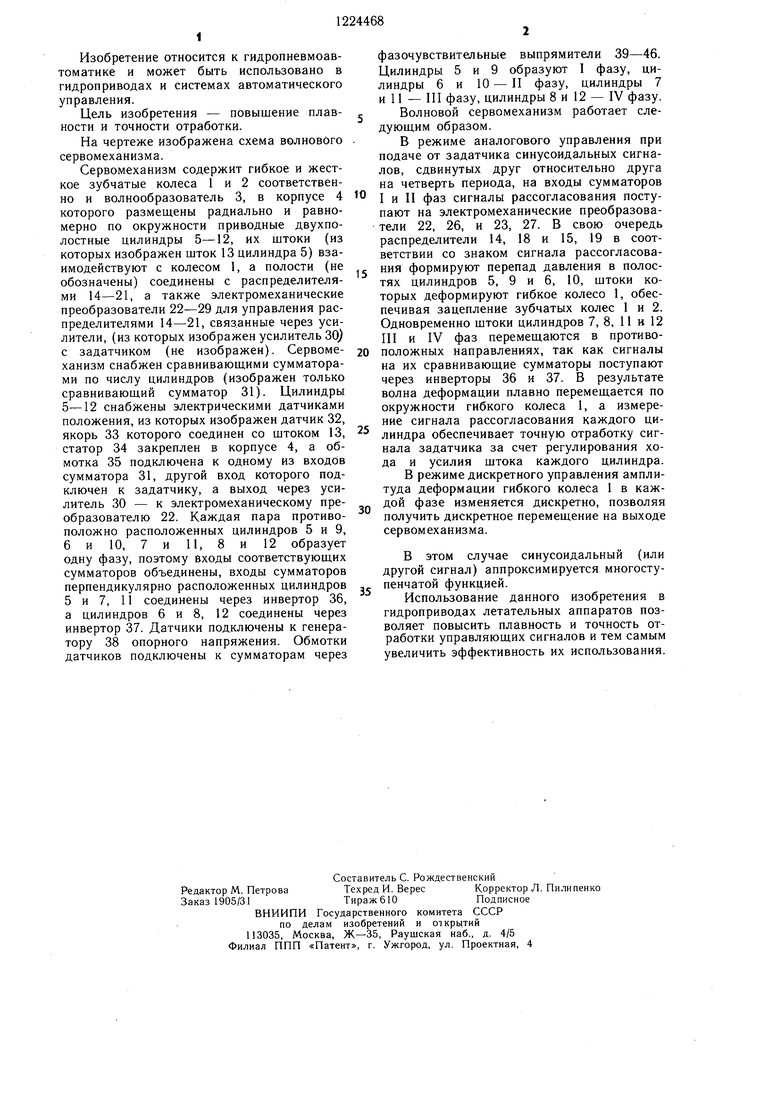
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОВОЙ СЕРВОМЕХАНИЗМ | 1991 |
|
RU2011062C1 |
| ВОЛНОВОЙ СЕРВОМЕХАНИЗМ СО СТАБИЛИЗАЦИЕЙ ФОРМЫ ВОЛНЫ ДЕФОРМАЦИИ (ВАРИАНТЫ) | 1999 |
|
RU2169298C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Вентильный электропривод | 1987 |
|
SU1432710A1 |
| Двухотсчетный следящий привод | 1989 |
|
SU1700535A1 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| Пневмо/гидро/привод | 1983 |
|
SU1168920A1 |
| Электрогидравлическая следящая система | 1976 |
|
SU926379A1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Гидравлический сервомеханизм | 1985 |
|
SU1280206A1 |

| Волновая зубчатая передача | 1981 |
|
SU1028914A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Посохин Г | |||
| Н | |||
| Дискретное управление электрогидравлическим приводом М.: Энергия, 1975, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
