нения катода оптронного анода полупроводникового тиристоров подключены к второму концу обмотки возбуждения реверсивного двигателя, анод оптронного тиристора через размыкающий контакт второго концево го переключателя подключен к положительному полюсу двуполярного источника напряжения, катод полупро70398
водникового тиристора подключен к отрицательному полюсу двуполярного источника напряжения, управляющий электрод оптронного тиристора через формирователь - усилитель подключен к замыкающему контакту датчика давления, а управляющий электрод полупроводникового тиристора подключен к выходу двухвходовой схемы И.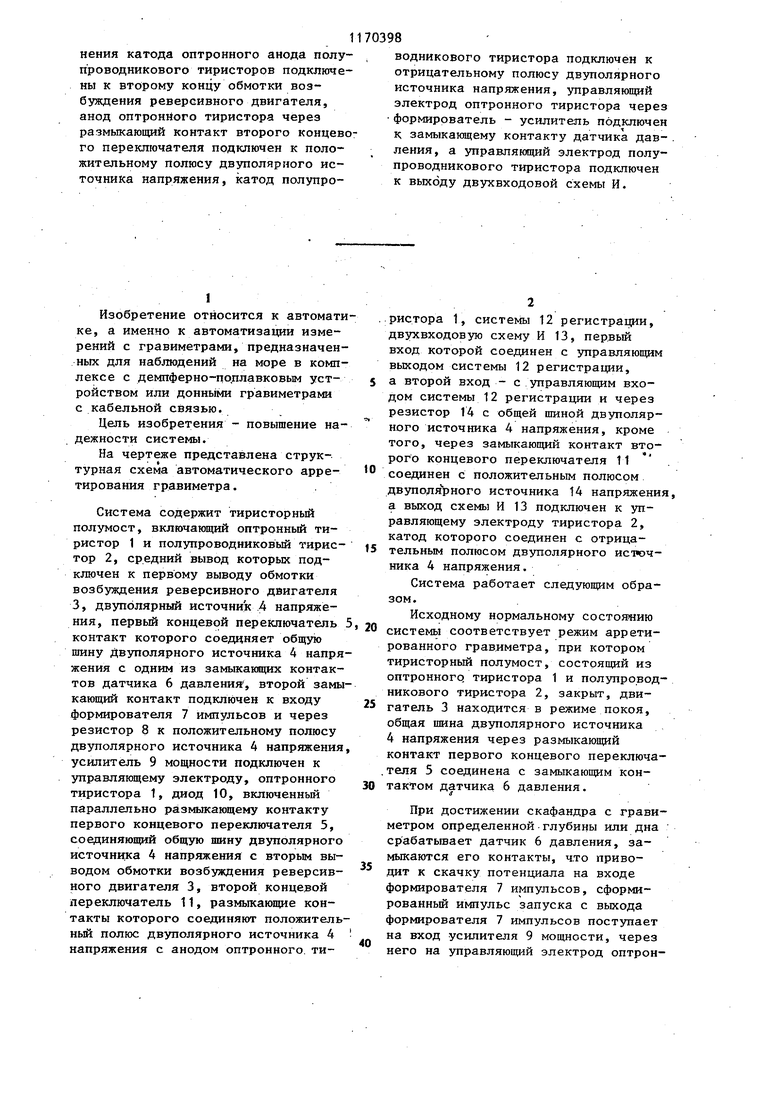

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тяговым электроприводом | 1979 |
|
SU874406A1 |
| Устройство для подачи сварочной проволоки | 1984 |
|
SU1197804A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Система для управления приводами гравиметра | 1977 |
|
SU1141367A1 |
| Система управления гравиметром | 1982 |
|
SU1084728A1 |
| ИССЛЕДОВАТЕЛЬСКИЙ КОМПЛЕКС ДЛЯ БЕГУНОВ | 2001 |
|
RU2203710C2 |
| Самоконтролирующаяся система электропитания постоянного напряжения | 1981 |
|
SU1001298A1 |
| Триггер со счетным входом | 1984 |
|
SU1251296A1 |
| Устройство для управления тяговым электродвигателем постоянного тока независимого возбуждения | 1988 |
|
SU1576373A1 |
| УСТРОЙСТВО ДЛЯ ВЫДЕРЖКИ ВРЕМЕНИ В ЭЛЕКТРИЧЕСКОЙ ЦЕНТРАЛИЗАЦИИ СТРЕЛОК И СИГНАЛОВ | 1993 |
|
RU2081771C1 |

1. СИСТЕМА АВТОМАТИЧЕСКОГО АРРЕТИРОВАНИЯ ГРАВИМЕТРА, содержащая реверсивньй двигатель с обмоткой возбуждения, вал которого соединен с механическим блоком арретирования гравиметра, двуполярный источник напряжения, .подключенный к обмотке возбуждения реверсивного двигателя через два концевых переключателя, подвижные контакты которых механически связаны с валом реверсивного двигателя, диод, подключенный к одному концу обмотки возбуждения двигателя, резистор и систему регистрации с управляющими i входом и выходом, отличающаяся тем, что, с целью повышения надежности системы, в нее дополнительно введены датчик давления с замыкающим контактом, схема управления реверсивным двигателем с двумя управляющими входами и одним выходом и двухвходовая схема И, при этом один контакт датчика давления соединен с размыкающим контактом первого концевого переключателя, подвижньй контакт которого соединен с общей шиной двуполярного источника питания и катодом диода, а его замыкающий контакт соединен с одним концом обмотки возбуждения реверсивного двигателя и анодом диода, второй конец обмотки возбуждения реверсивного двигателя подключен к выходу схемы управления реверсивным двигателем, второй контакт датчика давления подключен к первому управляющему входу схемы (Л управления реверсивным двигателем, а С к второму управляющему входу подключен выход схемы И, на один вход которой подключен управляющий выход системы регистрации, к управляющему входу которой и второму входу схемы И подключен замыкающий контакт второго концевого переключателя и резистор, второй конец ко00 торого подключен к общей шине дву со полярного источника направления, 00 а подвижный контакт второго конце.вого переключателя подключен к положительному полюсу двуполярного источника напряжения. 2. Система по п. 1, отличающаяся тем, что схема управления реверсивным двигателем выполнена в виде последовательно соединенных оптронного и полупроводникового тиристоров, имеющих аноды, катоды и управляющие электроды, причем выход схемы управления реверсивным двигателем, точка соеди
Изобретение относится к автомати ке, а именно к автоматизации измерений с гравиметрами, предназначен ных для наблюдений на море в комп лексе с демпферно-поплавковым устройством или доннь1ми гравиметрами с кабельной связью. Цель изобретения - повышение на дежности системы. На чертеже представлена структурная схема автоматического арретирования гравиметра. Система содержит тиристорный полумост, включающий оптронный тиристор 1 и полупроводниковый ТИРИСтор 2, средний вывод которых подключен к первому выводу обмотки возбуждения реверсивного двигателя 3, двуполярный источник 4 напряжения, первый концевой переключатель контакт которого соединяет общую шину Двуполярного источника 4 напря жения с одним из замыкающих контактов датчика 6 давления , второй замы кающий контакт подключен к входу формирователя 7 импульсов и через резистор 8 к положительному полюсу двуполярного источника 4 напряжения усилитель 9 мощности подключен к управляющему электроду, оптронного тиристора 1, диод 10, включенньй параллельно размыкающему контакту первого концевого переключателя 5, соединяющий общую шину двуполярного источника 4 напряжения с вторым выводом обмотки возбуждения реверсивного двигателя 3, второй концерой переключатель 11, размыкающие контакты которого соединяют положитель ньй полюс двуполярного источника 4 напряжения с анодом оптронного тиристора 1, системы 12 регистрации, двухвходовую схему И 13, первый вход которой соединен с управляющим выходом системы 12 регистрации, а второй вход - с управляющим входом системы 12 регистрации и через резистор 14 с общей шиной двуполярного источника 4 напряжения, кроме того, через замыкающий контакт второго концевого переключателя 11 соединен с положительным полюсом двуполя рного источника 14 напряжения, а выход схемы И 13 подключен к управляющему электроду тиристора 2, катод которого соединен с отрицательным полюсом двуполярного источника 4 напряжения. Система работает следующим образом. Исходному нормальному состоянию системь соответствует режим арретированного гравиметра, при котором тиристорный полумост, состоящий из оптронного, тиристора 1 и полупроводникового тиристора 2, закрыт, двигатель 3 находится в режиме покоя, общая шина двуполярного источника 4 напряжения через размыкающий контакт первого концевого переключателя 5 соединена с замыкающим контактом датчика 6 давления. При достижении скафандра с гравиметром определеннойглубины или дна срабатывает датчик 6 давления, замыкаются его контакты, что приводит к скачку потенциала на входе формирователя 7 импульсов, сформированньй импульс запуска с выхода формирователя 7 импульсов поступает на вход усилителя 9 мощности, через него на управляющий электрод оптрон3ного тиристора 1, открывает его, ч.то вызывает поступление положитель ного напряжения двуполярного источника 4 напряжения через открытый оптронный тиристор 1 и диод 10 на обмотку возбуждения реверсивного двигателя 3, вызывая его вращение в сторону разарретирования. При этом в начале движения размыкающий контакт первого концевого переклют чателя 5 размыкается и отключает от общей 11ШНЫ двуполярного источника напряжения 4 контакт датчика 6 давл ния, предотвращая в дальнейшем ложное срабатывание оптронного тири тора 1, при достижении конечного значения резарретирования переключа ется второй концевой переключатель 11, разрывая цепь питания реверсивного двигателя 3, одновременно подключая положительный полюс двзгао- лярного источника 4. напряжения к уп -равляющему входу системы 12 регистр ции и второму, входу схемы И 13, подготавлива:я ее к режиму арретирования, что соответствует началу процесса измерения. После снятия отсчетов с гравимет ра система 12 регистрации вьщает сигнал окончания замеров, который поступает на первьй вход схемы И 13 снимаемый с выхода схемы И 13 сигнал открывает тиристор 2, при котором отрицательное напряжение двуполярного источника 4 напряженияче 84 рез открытый тиристор 2 и размыкающий контакт первого концевого переключателя 5 подключается, к обмотке возбуждения реверсивного двигателя 3, вызывая его вращение в сторону арретирования гравиметра. При этом в начале движения второй концевой переключатель 11 возвращается в исходное состояние, что приводит к прекращению подачи через размыкающий контакт положительного напряжения двуполярного источника 4 напряжения на второй вход схемы И 13 и установлению на нем нулевого напряжения через резистор 14, что позволяет в дальнейшем исключить повторное срабатывание схемы И 13. При достижении конечного значения арретирования срабатывает первьй конценой переключатель 5, прекращая ток через обмотку возбуждения реверсивного двигателя 3 разрывом цепи контактов и одновременно подключая нулевое напряжение к контакту датчика 6 давления. Таким образом, система возвратилась в свое исходное состояние для следующих замеров. Использование системы автоматического арретирования вместо используемых систем ручного дистанционного арретирования позволяет повысить надежность системы арретирования гравиметров,
S
w)
Узел appe/nu/K fft/jt
Т
S
Ct/cjnsfta ffeztfc/rtpcfefuo
/4
к
pH
| Гравиразведка | |||
| Под ред | |||
| Е.А.Мудрецовой | |||
| М.: Недра, 1981, пр | |||
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |
| Разработка, изготовление и испь тание автоматической донно-гравиметрической аппаратуры и аппаратуры для измерения силы тяжести в скафандре демпфированного поплавкового устройства | |||
| Технический отчет по теме ПО Южморгеология, Геленджик, 1969. | |||
