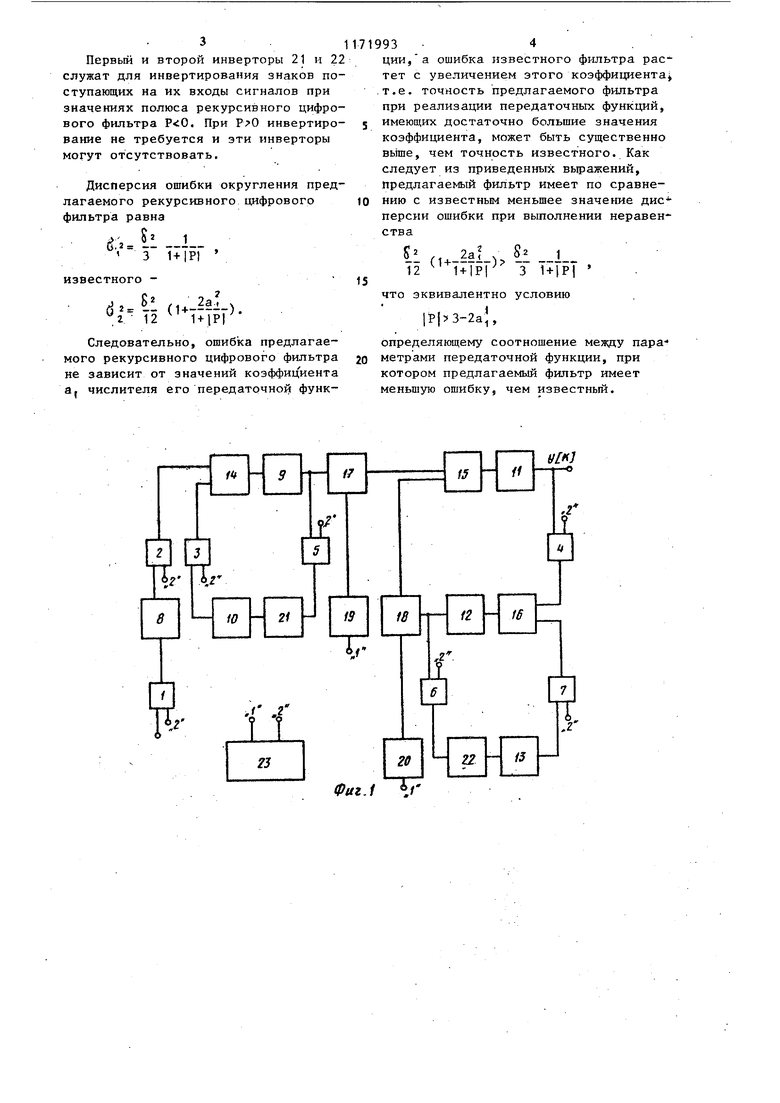
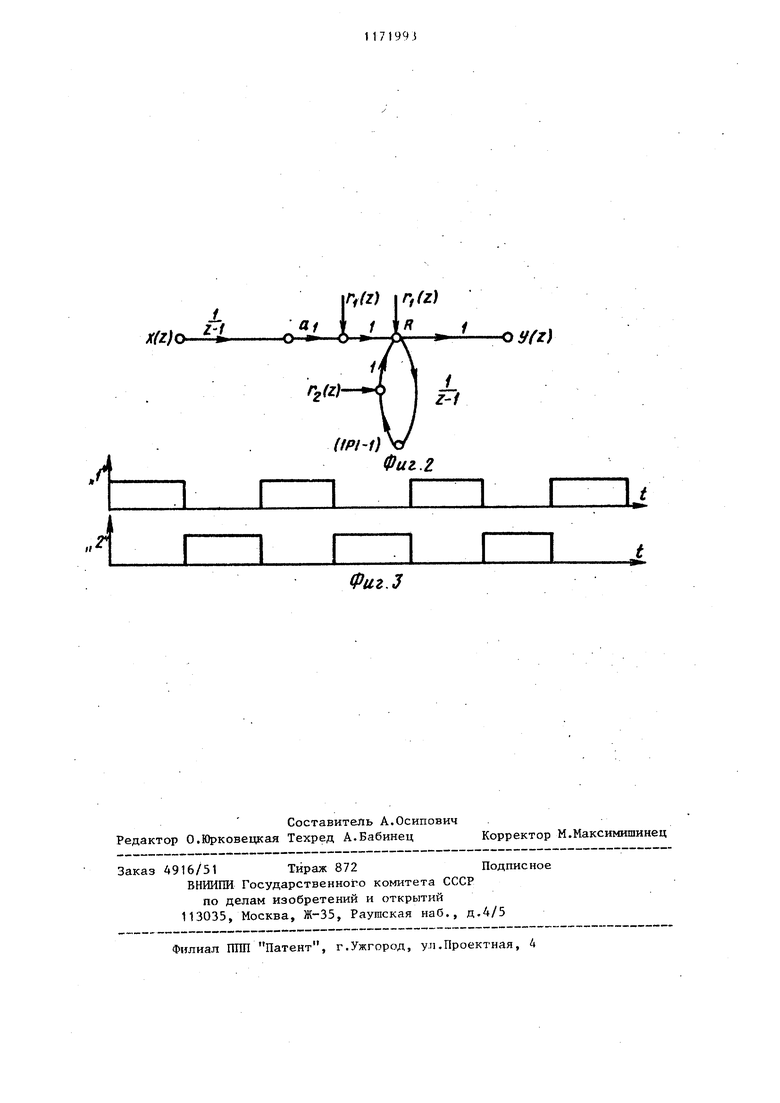
Изобретение относится к радиотех-; нике и может быть использовано в ,сисг темах цифровой обработки информации. Цель изобретения - повышение устой чивости работы фильтра. . На фиг.1 приведена структурная электрическая схема рекурсивного фильтра} на фиг.2 - его сигнальный граф, на фиг.З - диаграммы работы бло ка синхронизации. Рекурсивный цифровой фильтр содержит первый, второй, третий, четвертый, пятый, шестой и седьмой блоки элементов И 1-7,. первый, второй, третий, четвертый, пятый и шестой регистры 8-13 сдвига, первый, второй и тре тий сумматоры 14-16, первый и второй .умножители 17 и 18, первый и второй блоки 19 и 20 памяти, первый и второй инверторы 21 и 22 и блок 23 синхрониэации. Фильтр работает следующим образом. Работа предлагаемого рекурсивного цифрового фильтра описывается системо уравнений ,xrK-11+Csigii Р)()УГК-1 ; X K l X K-1j-H(sign Р) .(sign P)), реализующих передаточную функцию вида (6иг.2) Перед началом вычислений выходного сигнала в первом, третьем, пятом и шестом регистрах В, 10, 12 и 13 сдвига записывается соответственно значения переменных ,iXrK-2,4YtK-0 и , где знак + соответствует положительную полюсу фильтра, а знак - - отрицательному. Вычисления в каждом такте проводятся в два этапа. На первом этапе, по команде 1 вырабатьгоаемой блоком 23 синхронизации (фиг.2), подаются разрешающие сиг налы на второй, третий и шестой блоки элементов И 2,3 и 6 и входы управления первого и второго блоков 19 и 20 памяти, в которых хранятся значения коэффициентов. ПрИ этом значения переменных и iXtK-23 поступают на входы первого сумматора 14. Значение суммы . записывается в регистр 9 сдвига и подается на второй вход первого блока 17 умножения, на второй вход которого с выхода первого блока 19 памяти подается значение ;соэффициента а. Сигнал произведения к-Л подается на первый вход второго сумматора 15. Одновременно на второй его вход с выхода второго блока 18 умножения поступает сигнал произведения (sign Р) ( |Р|-1) , для получения которого на пходы второго блока 18 умноже-. йия подаются сигналы (sign Р) (iPj-l) и с выхода второго блока 20 памяти и пятого регистра 12 сдвига соотпетственно. Сигнал суммы .1 a, + (sign P)(|Pl-1) , представляющий собой выходной сигнал рекурсивного цифрового фильтра, за- писывается в четвертый регистр 11 сдвига и поступает на выход фильтра. Одновременно с этим сигнал с выхода пятого регистра 12 сдвига -через шестой блок элементов И 6 и второй инвертор 22 поступает в шестой ; регистр 13 сдвига 4 На втором этапе такта (фиг.2) формируются и записьшаются в первый, третий и пятый регистры 8, 10 и 12 сдвига значения переменных, необходимые для вычисления выходного сигнала фильтра в следующем такте. Для этого п.о команде 2 блока 23 синхронизации подаются разрешающие сигналь на первый, четвертый, пятый и седьмой блоки элементов И 1,4,5 и 7, При этом входной сигнал . с информационного входа фильтра через первый блок элементов И 1 поступает в первый регистр 8 сдвига, сигнал с второго регистра 9 сдвига через пятый блок элементов И 5 и первый инвертор 21 подается в третий регистр 10 сдвига, на входы трет-ьего сумма- тора 16 одновременно поступают с выхода рекурсивного цифрового фильтра через четвертый блок элементов И 4 сигнал и с шестого регистра 13 сдвига через седьмой блок элементов И 7 сигнал i , а. сигнал суммы записьшается в пятый регистр 12 сдвига. В следующем (К+1)-м такте вычислений работа рекурсивного цифрового фильтра описывается аналогично. Таким образом, в каждом такте вычислительного процесса на выходе фильтра вырабатывается значение выходного сигнала , определяются и записываются в соответствующие регистры сдвига данные, необходимые для вычислений в следующем такте.
3 . Первый и второй инверторы 21 и 22 служат для инвертирования знаков поступающих на их входы сигналов при значениях полюса рекурсивного цифрового фильтра . При инвертирование не требуется и эти инверторы могут отсутствовать.
Дисперсия ошибки округления предлагаемого рекурсивного цифрового фильтра равна
Гг 3 H-IPI
известного -
(. г 12 1 + 1PI
Следовательно, ошибка предлагаемого рекурсивного цифрового фильтра не зависит от значений коэффициента а, числителя его передаточной функ719934
ции,а ошибка известного фильтра рас тет с увеличением этого коэффициента .т.е. точность предлагаемого фильтра при реализации передаточных функций, J имеющих достаточно большие значения коэффициента, может быть существенно вьппе, чем точность известного. Как следует из приведенных выражений, предлагаемый фильтр имеет по сравнению с известным меньшее значение дисПерсии ошибки при выполнении неравенства
Sj (,, 2al . 8 1 12 1 + 1РГ 3 I + IPI
что эквивалентно условию 1Р1 3-2а|,
определяющему соотношение между пара 0 метрами передаточной функции, при котором предлагаемый фильтр имеет меньшую ошибку, чем известный.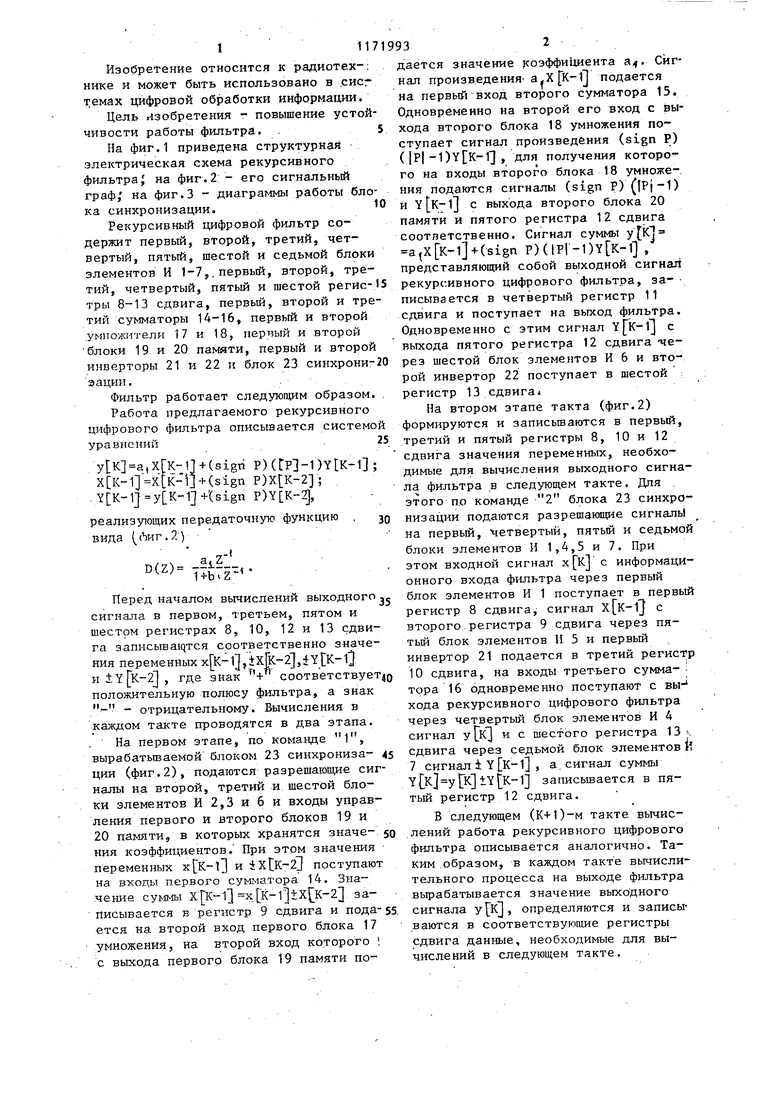
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ФИЛЬТР | 1991 |
|
RU2006936C1 |
| ПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ФИЛЬТР | 1992 |
|
RU2057364C1 |
| СПОСОБ ЦИФРОВОЙ РЕКУРСИВНОЙ ПОЛОСОВОЙ ФИЛЬТРАЦИИ И ЦИФРОВОЙ ФИЛЬТР ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2014 |
|
RU2579982C2 |
| Устройство для прогнозирования длительности производственных операций | 1990 |
|
SU1781685A1 |
| СПОСОБ ЦИФРОВОЙ РЕКУРСИВНОЙ ПОЛОСОВОЙ ФИЛЬТРАЦИИ И ЦИФРОВОЙ ФИЛЬТР ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2011 |
|
RU2460130C1 |
| ЦИФРОВОЙ ФИЛЬТР | 1993 |
|
RU2096911C1 |
| Устройство коррекции высокочастотных предыскажений сигнала цветности системы СЕКАМ | 1985 |
|
SU1363538A1 |
| Устройство для формирования отрезка прямой линии на экране электронно-лучевой трубки | 1979 |
|
SU919163A1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ | 1982 |
|
SU1090136A1 |
| Рекурсивный цифровой фильтр | 1986 |
|
SU1385264A1 |
РЕКУРСИВНЫЙ ОДФРОВОЙ ФИЛЬТР, содержащий первый блок элементов И, первый вход которого является входом рекурсивного цифрового фильтра, второй блок элементов И, последовательно соединенные третий блок элементов И и первый сумматор, последовательно соединенные первый блок памяти, второй умножитель и второй сумматор, последовательно соединенные второй блок памяти и первый умножи,тель, последовательно соединенные четвертый блок элементов И и третий сумматор, а также пятый и шестой бло,ки элементов И и блок синхронизации, выходы которого подключены к вторым входам всех блоков элементов Инк входам управления первого и второго блоков памяти, отличающийс я тем, что, с целью повьшения устойчивости работы, в него введены первый регистр сдвига, включенный между выходом первого блока элементов И и первым входом второго блока элементов- И, выход которого соединен с вторым входом первого сумматора, второй регистр сдвига,- включенный между выходом первого сумматора и объединенными вторым входом первого умножителя и первым входом пятого блока элементов И, между выходом которого и первым входом третьего блока элементов И включены последовательно соединенные первый инвертор и третий регистр сдвига, четвертый регистр сдвига, вход которого подключен к выходу второго сумматора, а выход соединен с первым входом Четверi того блока элементов И и является выходом рекурсивного цифрового фильСЛ тра, пятый регистр сдвига, включенный между выходом третьего сумматора и объединенным вторым входом второго умножителя с первым входом шестого блока элементов И, между выходом которого и вторым входом третьего сумматора включены последовательно соединенные второй инвертор, шестой регистр сдвига и седьмой блок элементов И, при этом выход первого умножителя подключен к второму входу со второго сумматора, выход блока синх( ронизации является парафазным и соединен одним вьшодом с вторыми входами оо второго, третьего и шестого блоков элементов И и входами управления первого и второго блоков памяти, а другим выводом - с вторыми входами первого, четвертого, пятого и седьмого блоков элементов И.
Фиг.1 /
fit
ГМ
ffpff)
rffz) r,(i)
V yfzy
±
Zf
Фиг.З
| Рабинер Л., Гоулд Б | |||
| Теория и применение цифровой обработки сигналов | |||
| М.: Мир, 1978, с | |||
| Солесос | 1922 |
|
SU29A1 |
| Цифровой фильтр | 1982 |
|
SU1059669A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
