2. Захват по п. 1, отличающийся тем, что он снабжен фиксирующей втулкой, установленной на коленообразной оси между стойками опорного элемента с возможностью вертикального перемещения,
3. Захват по п. 2, отличающийся тем, что фиксирующая втулка выполнена с направляющими пазами для стоек опорного элемента.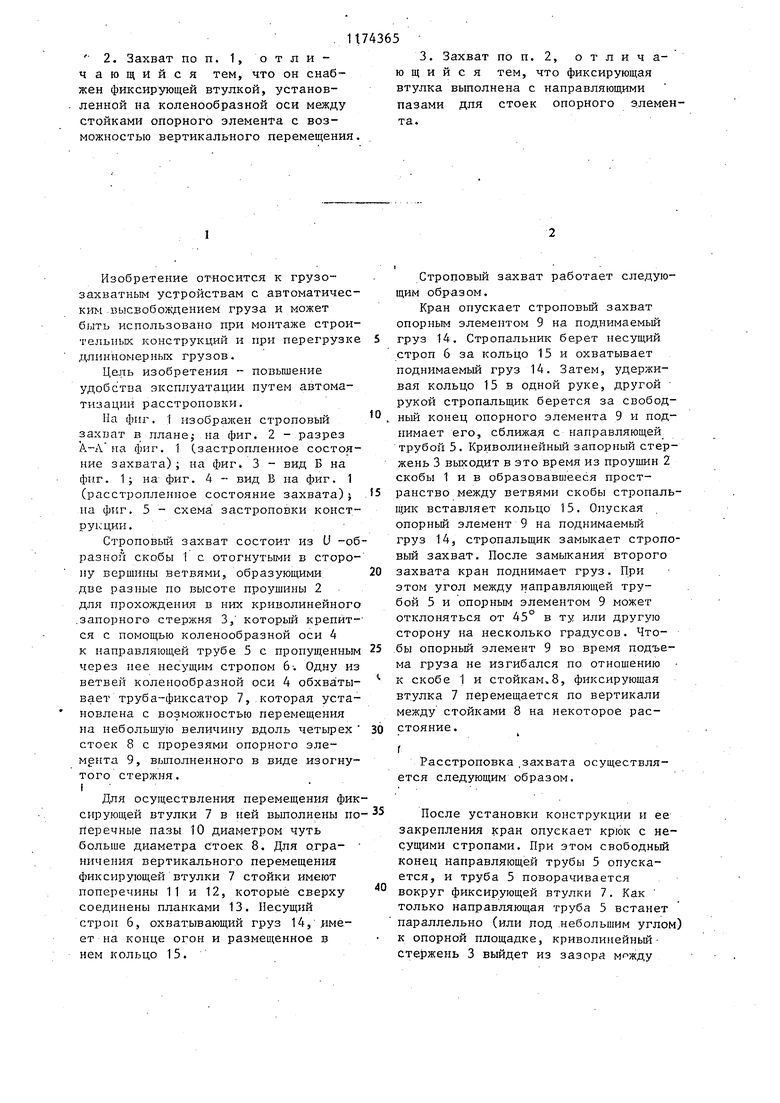

| название | год | авторы | номер документа |
|---|---|---|---|
| Строповый захват | 1987 |
|
SU1444273A1 |
| Штыревой замок грузозахватного устройства | 1990 |
|
SU1791326A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1986 |
|
SU1398303A1 |
| ПРИЕМНАЯ ПЛОЩАДКА ДЛЯ ПОДАЧИ ГРУЗОВ В ПРОЕМ ЗДАНИЯ | 1991 |
|
RU2016989C1 |
| Строповый захват для монтажа вертикальных конструкций | 1982 |
|
SU1100214A1 |
| Штыревое строповое устройство | 1982 |
|
SU1025642A2 |
| ШТЫРЬЕВОЙ ЗАМОК ГРУЗОЗАХВАТНОГО УСТРОЙСТВА | 1991 |
|
RU2013345C1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ЛОПАСТИ | 2020 |
|
RU2742357C1 |
| Строповый захват | 1988 |
|
SU1562289A1 |
1. СТРОПОВЫЙ ЗАХВАТ, содержащий скобу с проушинами на концах, запорный стержень, установленный с возможностью захода в проушины скобы, и элемент крепления стропа к скобе, размещенный в его огоне, о т л ичающийся тем, что, с целью повьш1ения удобства эксплуатации путем автоматизации расстроповкй, он снабжен направляющей трубой, в которой размещен строп, жестко прикрепленный к ней коленообразной осью, и опорным элементом с жестко прикрепленными к нему стойками с прорезями, в которых установлена с возможностью поворота коленообразная ось, при этом запорный стержень жестко прикреплен к оси и выполнен криволинейной формы, а элемент крепления стропа к скобе представляет собой кольцо, устанавливаемое межО) ду проушинами скобы с возможностью с взаимодействия с запорным стержнем. /9 ОПь со Од СП
Изобретение относится к грузозахватным устройствам с автоматическим .высвобождением груза и может быть использовано при монтаже строительных конструкций и при перегрузке длинномерных грузов.
Цель изобретения - повышение удобства эксплуатации путем автоматизации расстроповки.
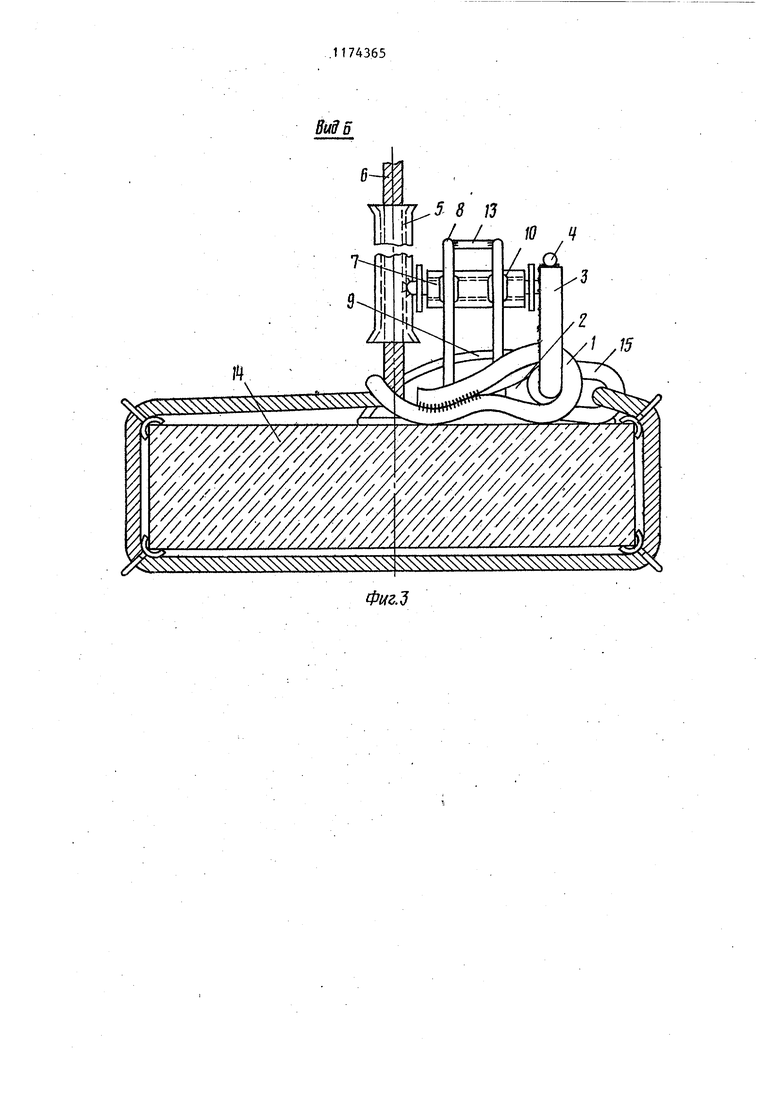
На фиг. 1 изобралсен строповый захват в планер на фиг. 2 - разрез А-А на фиг. 1 (застропленное состояние захвата); на фиг. 3 - вид Б на ф1г.г. 1 ; на фиг. 4 - вид Б на фиг. 1 (расстропленное состояние захвата)j на фиг. 5 - схема застроповки конструкции.
Строповый захват состоит из U -образной скобы 1 с отогнутыми в сторону вершины ветвями, образующими две разные по высоте проушины 2 для прохождения в них криволинейного .запорного стержня 3, который крепится с помощью коленообразной оси 4 к направляющей трубе 5 с пропущенным через нее несущим стропом 6-. Одну из ветвей коленообразной оси 4 обхватывает труба-фиксатор 7, которая установлена с возможностью перемещения на небольш5по величину вдоль четырех стоек 8 с прорезями опорного элемента 9, вьшолненного в виде изогнутого стержня. I
Для осуществления перемещения фиксирующей втулки 7 в ней выполнены поперечные пазы 10 диаметром чуть больше диаметра стоек 8. Для огра- ничения вертикального перемещения фиксирующей втулки 7 стойки имеют поперечины 11 и 12, которые сверху соединены планками 13. Несущий строп 6, охватывающий груз 14, имеет на конце огон и размещенное в нем кольцо 15.
Строповый захват работает следующим образом.
Кран опускает строповьй захват опорным элементом 9 на поднимаемый 5 груз 14. Стропальник берет несущий строп 6 за кольцо 15 и охватывает поднимаемый груз 14. Затем, удерживая кольцо 15 в одной руке, другой рукой стропальщик берется за свобод . ньй конец опорного элемента 9 и поднимает его, сближая с направляющей трубой 5. Криволинейный запорный стержень 3 выходит в это время из проушин 2 скобы 1 и в образовавшееся пространство между ветвями скобы стропальщик вставляет кольцо 15. Опуская опорньй элемент 9 на поднимаемый груз 14, стропальщик замыкает строповый захват. После замыкания второго
0 захвата кран поднимает груз. При этом угол между направляющей трубой 5 и опорным элементом 9 может отклоняться от 45° в ту или другую сторону на несколько градусов. Чтобы опорньй элемент 9 во время подъема груза не изгибался по отношению к скобе 1 и стойкам,8, фиксирующая втулка 7 перемещается по вертикали между стойками 8 на некоторое расстояние.
Расстроповка .захвата осуществляется следующим образом.
5 После установки конструкции и ее закрепления кран опускает крюк с неСУЩИМИ стропами. При этом свободньй конец направляющей трубы 5 опускается, и труба 5 поворачивается вокруг фиксирующей втулки 7. Как только направляющая труба 5 встанет параллельно (или под небольшим углом) к опорной площадке, криволинейныйстержень 3 выйдет из зазора мржду
311743654
ветвями скобы 1, кольцо 15 под.дей- расстроповку. Кран поднимает строствием собственного веса вьтадет из повые захваты для строповки другой зазора,производя таким образом конструкции.
| Андреев А.Ф | |||
| Грузозахватные устройства с автоматическим и.дистанционным управлением | |||
| М.: Стройиздат, 1979, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
