4
tc
-vj
00
tputt
Изобретение относится к грузоэах- ватньм устройствам с автоматическим высвобсиодением груза и может быть использовано в строительстве при монтаже строительных конструкций или машиностроении при перегрузке длинномер- ньгк грузов.
Цель изобретения - повьшение удобства в эксплуатации,
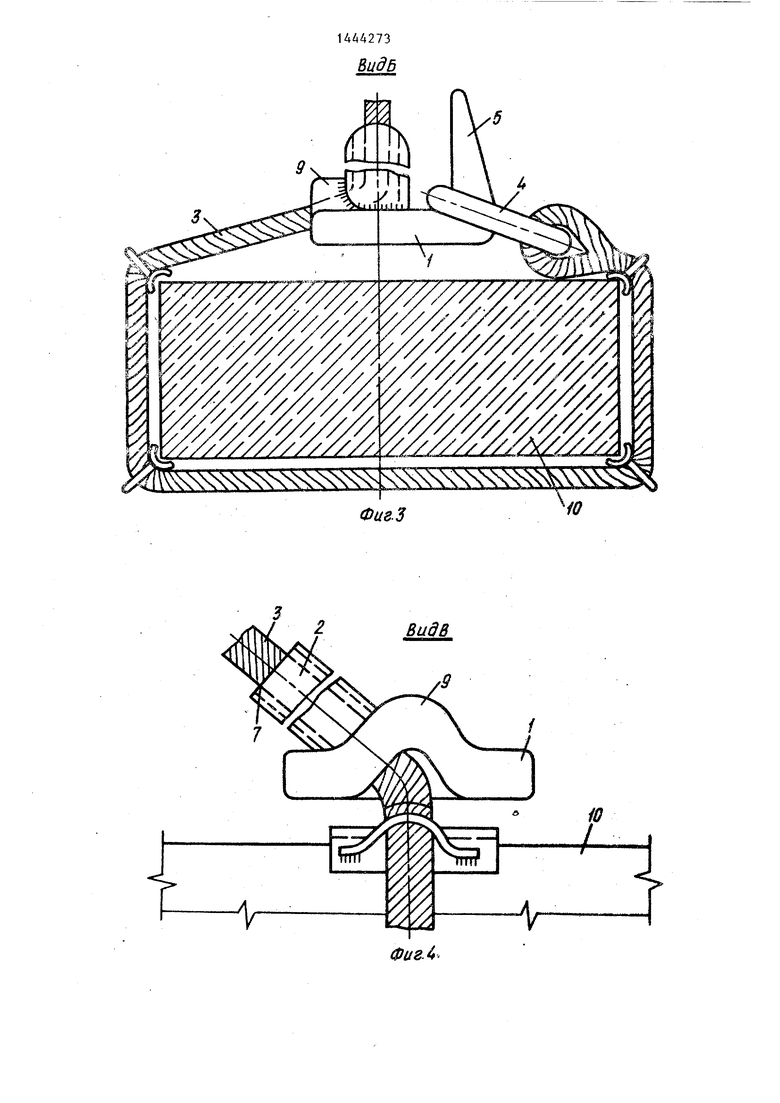
На фиг„1 изображен строповый захват общий BHflj на фиг,2 - вид; А на фиг, на фиг.З - вид F на. сриг,. 1; на фиг.4 - вид В на фиг.2, на фиг«5 строповьй захват в начальный момент расстроповки на фиг,6 - то же, в со стоянии расстроповкио
Строповьй захват содержит опорный элемент 1, направляющую трубу 2, в которой размещен строп 3 и проушину
4на одном из концов стропа 3. Опорны элемент 1 вьшолнен в В}где несиммет ричното кольца с разным по его пери метру сечением Направляющая труба
2 установлена под острьм углом к продольной плоскости кольца 1 над его внутренниг-1 отверстием и жестко соединена с кольцом 1 одним своим кон- дом. Строповьй захват снабжен жестко закрепленным на верхней поверхности кольца 1 вдоль его продольной оси рогом Sj продольная ось которого параллельна продольной оси направляющей трубы 2, Рог 5 установлен с возможностью взаимодействия с проушиной стропа. Опорный элемент 1 выполнен с двумя смежными криволинейными опорными поверхностями, первая из которьс: 6 расположена под направляющей трубой 2 выпуклостью в сторону свободного конца 7 этой трубы, а вторая 8 - под рогом 5 с вьтуклостью в сторону его основания.
Опорный элемент 1 вьтолнен в выгибом 9 в вертикальной плоскости на сГси, проходящей через основание рога
5и центр внутреннего отверстия кольца 1 для размещения под ним свободного конца стропа 3,
Выгиб 9 в опорном элементе 1 выполнен для того, чтобы строп 3 и проушина 4 на конце стропа при ч ран- спортировке груза находились в одной горизонтальной плоскости.
Строповьй захват работает следующим образом,
Кран опускает строповые захваты опорными элементами 1 на поднимаемьй груз 10. Стропальщик отводит стропо
0
5
Q
5
5
0
5
0
5
0
вый захват от центра конструкции к месту строповки, берет несущий строп 3 за проушину 4 и охватьгоает подни- маемьй груз 10. Затем, удерживая строповьй захват одной рукой, он оде вает другой рукой проушину 4 на рог 5. Точно так жепроизводится застро- повка второго захвата. При этом кра- HOBbrii; крюк со стропами располагается над центром тяжести поднимаемого 1 руза, После этого кран поднимает мон .г;фуемьй груз (конструкцию) несколько вьше проектной отметки и опускает на рабочее место.
Расстроповка захвата осуществляется следующим образом.
После установки груза 10 и его закрепления кран опускает крюк соот- стропами 3 и отводит его из плоскос 1 И монтируемой конструкции в сторону рогов. Опорньй элемент 1 опускается на груз 10 и опирается на опорную поверхность 6, Движение кольца 1 по опорной 0оверхности 6 происходит до тех nops пока свободные концы 7 труб 2 не будут ниже опорного элемента 1 Движение опорного элемента 1 далее происходит по опорной поверхности 8, смежной с поверхностью 6, при этом рога 5 занимают наклонное положение. Проушины 4 под действием их собственного веса и веса концов, несущих строп 3-. соскальзывают . гов 5.
Иногда при монтаже конструкций для проверки правильности их укладки требуется произвести опускание крюка с несущими стропами на небольшую величину без расстроповки, Расстроповки при этом не происходит, поскольку острые концы рогов 5 iaxoдятcя выше Hjt основания и проушины 4 не могут соскользнуть с них и произвести рас- строповку. Для осуществления расстроповки необходшю выполнить специальную расстроповочную операцию, отвести направляющие трубы 2 с нес ущг ш стропами 3 в сторону из плоскости монтируемой конструкции и опустить строги) до тех пор,, пока концы рогов 5 не опустятся ниже оснований и проушины 4 свободно соскользнут с рогов 2.
При быстром и одновременном движении несущих строп вниз и в сторону опирание кольца 1 возможно на опорную поверхность 8. В этом случае расстро- повка произойдет раньше при меньшем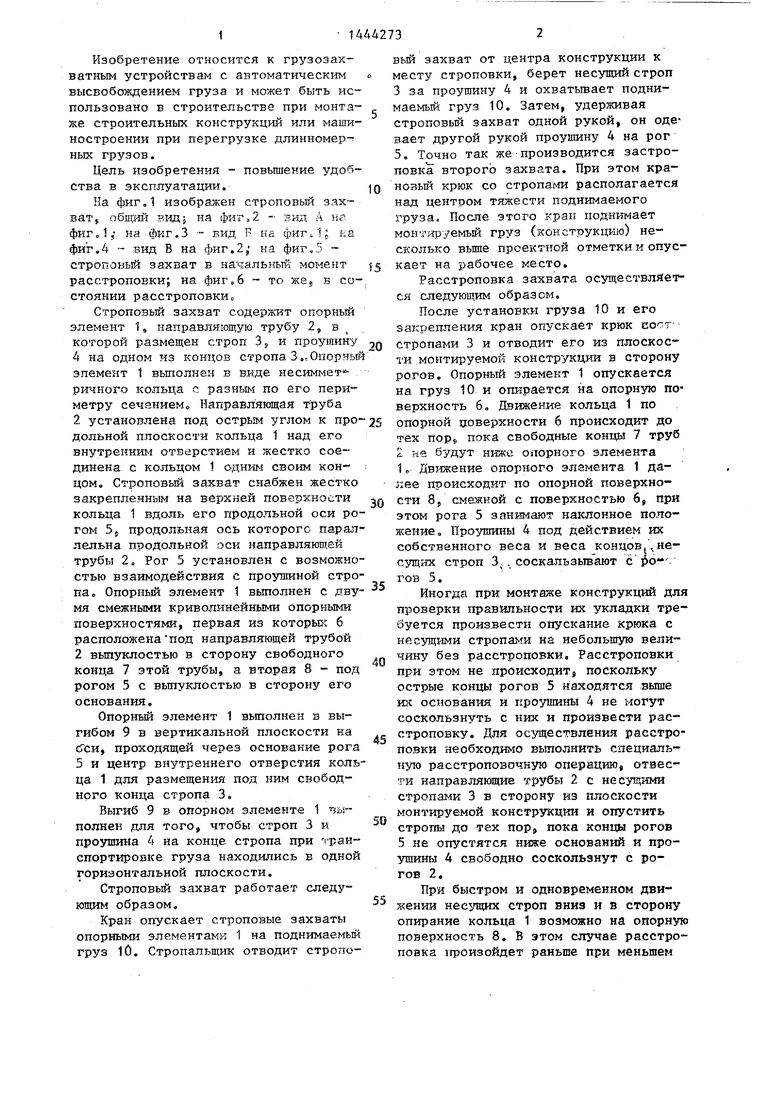

| название | год | авторы | номер документа |
|---|---|---|---|
| Строповый захват | 1984 |
|
SU1174365A1 |
| Строповый захват | 1988 |
|
SU1562289A1 |
| ТРАВЕРСА ДЛЯ БИГ-БЕГОВ С АВТОМАТИЧЕСКОЙ РАССТРОПОВКОЙ | 2024 |
|
RU2834112C1 |
| Штыревое стопоровое устройство | 1977 |
|
SU650942A1 |
| Грузозахватное устройство для тонколистового материала | 1980 |
|
SU977355A1 |
| Г ВСЕСОЮЗНАЯI?Л7''!; .'"-•^•••;^п;.«-Г';дя Iь.^:»^^к---.:.. д:8-Г" IЭ. А. Скоб | 1971 |
|
SU311848A1 |
| Строповый захват для монтажа вертикальных конструкций | 1982 |
|
SU1100214A1 |
| ЗАХВАТ ДЛЯ ИЗДЕЛИЙ С ОТВЕРСТИЕМ | 1991 |
|
RU2048419C1 |
| Грузозахватное устройство | 1988 |
|
SU1588688A1 |
| ГРУЗОВАЯ СКОБА | 1994 |
|
RU2123969C1 |

Изобретение относится к грузозахватным устройствам с автоматическим высвобождением груза. Целью изобретения является повышение удобства в эксплуатации. Опорный элемент 1 стропового захвата вьтолнен в виде кольца с разным по его периметру сечением. Направляющая труба, 2, в которой размещен строп 3, установлена над внутренним отверстием кольца, наклонена к его продольной плоскости под острым углом и жестко соединена с кольцом. Параллельно ей на наружной поверхности кольца 1 жестко закреплен рог 5 для взаимодействия с проушиной 4 стропа. Опорный элемент 1 вьтолнен с двумя смежными криволинейными опор- ньтми.поверхностями 6 и 8, первая из которых расположена над трубой 2 выпуклостью в сторону ее свободного конца 7, а вторая - под рогом 5 с выпуклостью в сторону его основания. При расстроповке опорный элемент 1 опускается на груз 10 и опирается на опорную поверхность 6. Движение кольца 1 по этой поверхности происходит до тех пор, пока свободный конец 7 трубы 2 не будет ниже опорного элемента 1. Далее движение опорного элемента 1 происходит по опорной поверхности 8, смежной с поверхностью 6. Рог 5 занимает наклонное положение. Проушина 4 стропа под действием собственного веса и веса несущего стропа соскользнет с рога 5. 6 ил. i (Л С
Фиг. 1
Фи8.3
Виде
Фив.
Фи2.5
| Строповый захват | 1984 |
|
SU1174365A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
