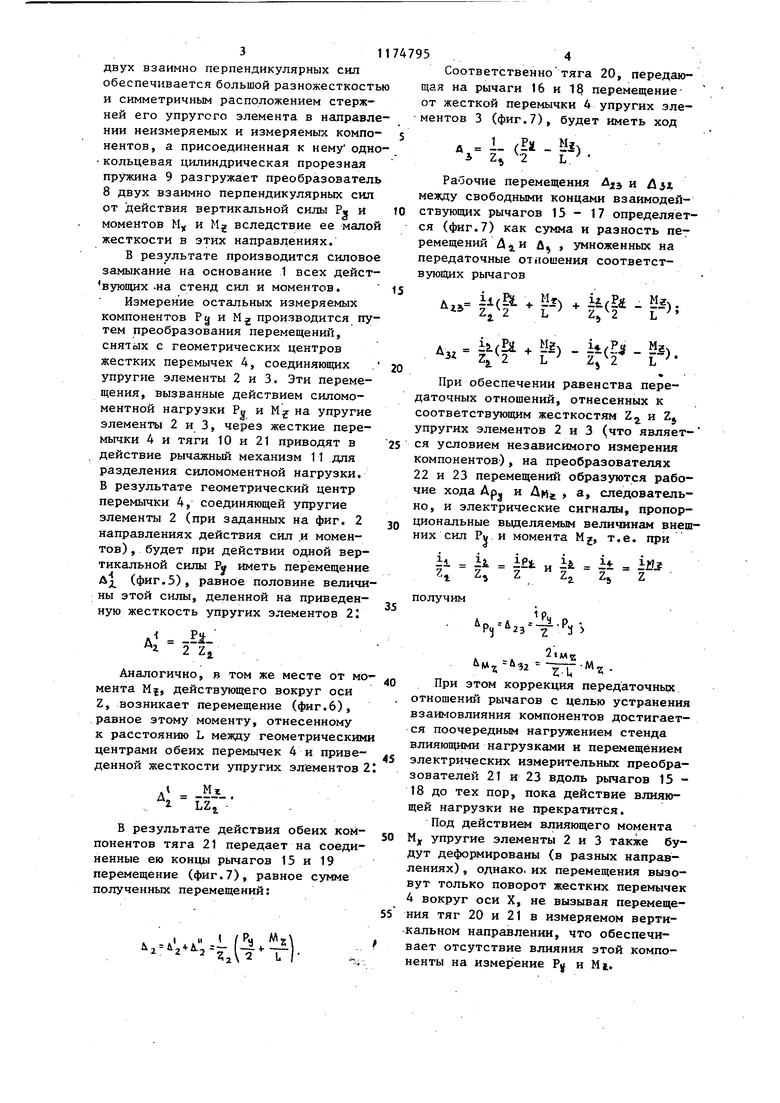
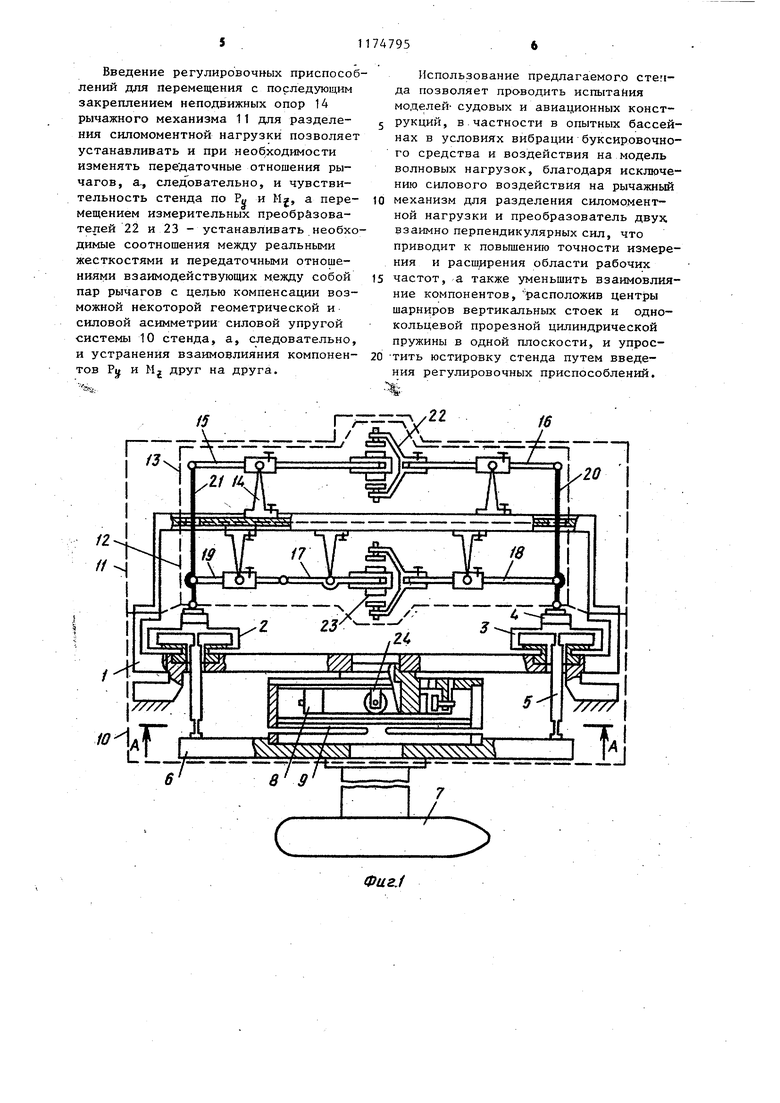
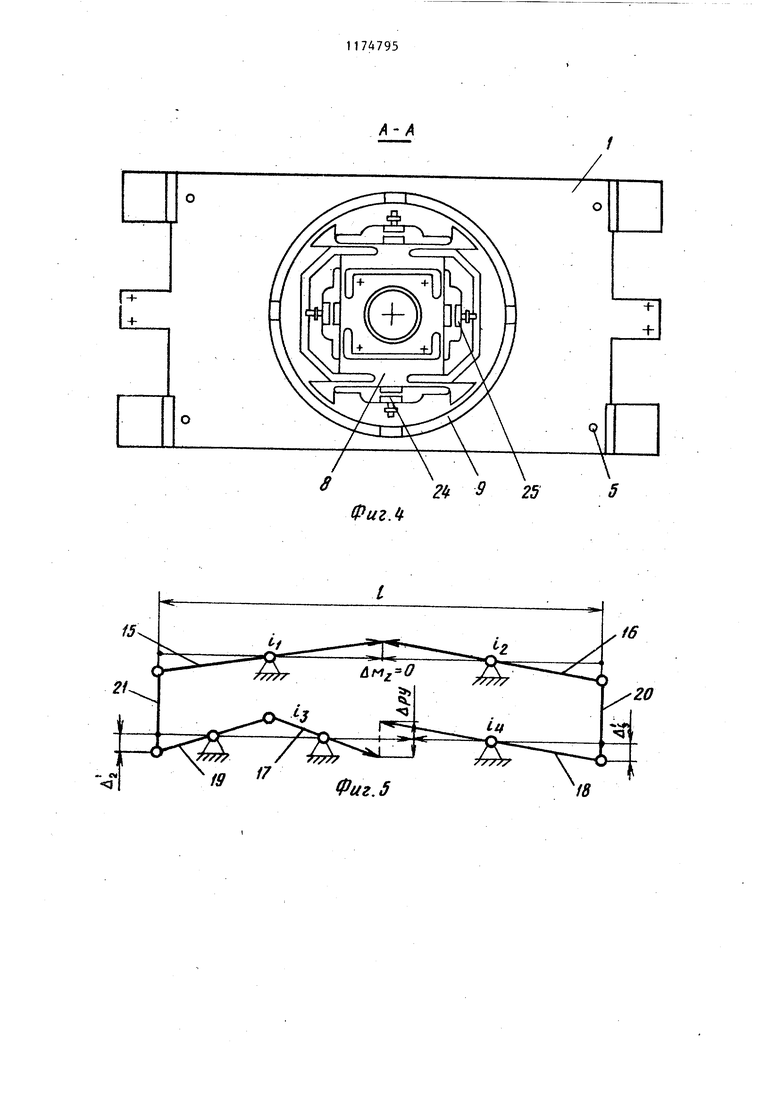
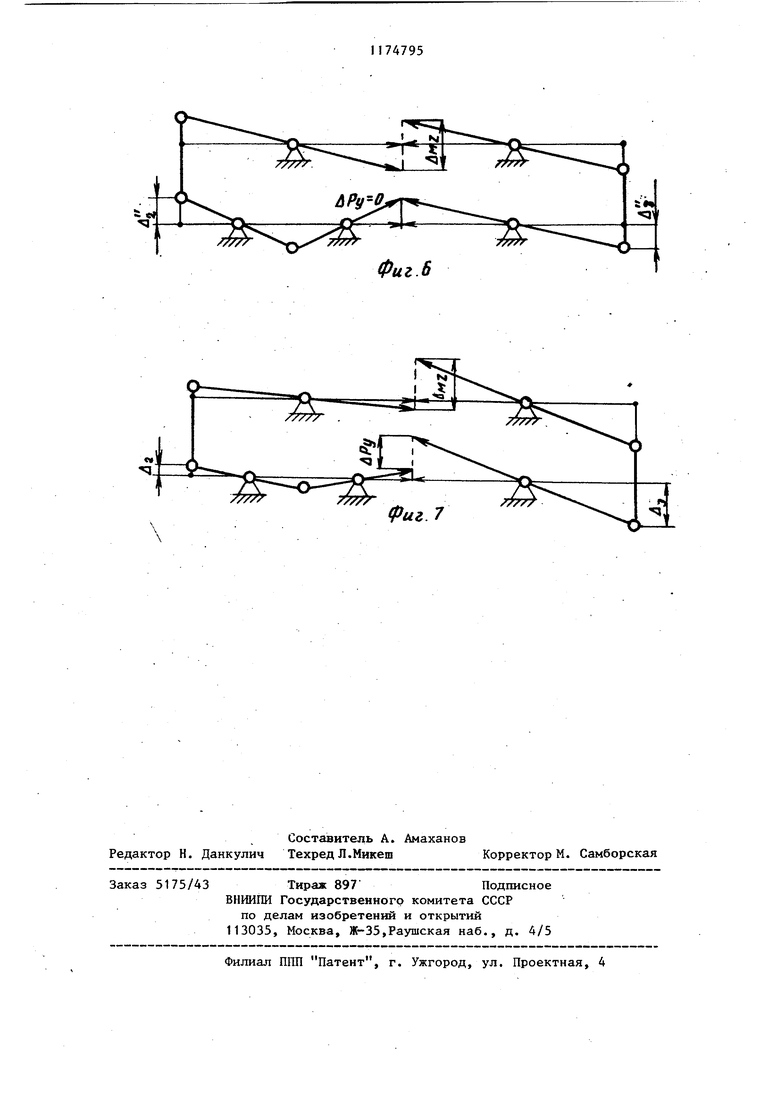
Изобретение относится к сшюизме рительной технике и может быть использовано для измерения сил и их моментов при гидродинамических и аэ рогидриодинамических исследованиях судовых и авиационных конструкций. Цель изобретения - повышение точ ности измерения в условиях повышенных вибраций и расширение частотног диапазона путем исключения непосред ственного силового воздействия на механизм разделения компонент силомоментной нагрузки. На фиг. 1 представлен схематично предложенный стенд, общий вид; -на фиг.2 - принятая система координат; на фиг.З - предлагаемое устройство, вид сверху; на фиг.4 - разрез А-А на фиг.1; на фиг. 5-7 схемы полож ний рычажного механизма для разделе ния силомоментной нагрузки после нагружения стенда соответственно силой PU , моментом Mji и силомоментной нагрузкой Ра, Mj. Предлагаемый стенд имеет основание 1 с установленными на нем симме рично осям координат четырьмя равножесткими упругими элементами 2 и 3 (два упругих элемента находятся в параллельной плоскости) и соединенны ми между собой жесткими перемычками 4. Двухшарнирные стойки 5, связывающие своими концами силоприемную раму 6 с упругими элементами 2 и 3, вместе образуют пространственный параллелограм - качалку. К силоприем ной раме 6 крепится испытываемое изделие 7. Соединенный с основанием 1 в центре его симметрии преобразователь 8 двух взаимно перпендикулярных сил Рд и PJ. крепится к сило прием ной раме 6 через однокольцевую цилиндрическую прорезную пружину 9. Вс эти элементы образуют силовую упругую систему 10 стенда, имеющую пять степеней подвижности (в направлениях X, Y, Z, MX, М), у которой центры шарниров, связьшающих вертикальные стойки 5 с силоприемной рамой 6, рас положены симметрично относительно геометрического центра упругого кольца о нокольцевой цилиндрической прорезной пружины 9 и находятся в одной плоскости. Рычажный механизм 11 для разделения силомоментной нагрузки образован из двух независимых силового 12 и моментного 13 измерителей. смонтированных на неподвижных опорах 14основания 1, и расположенных по конструктивным соображениям либо на двух уровнях (как это изображено на чертеже), либо парашлельно друг другу. При этом измеритель 13 момента содержит два двуплечих рычага 15и 16, а измеритель 13 силы - три двухплечих рычага 17 - .18 - 19. Неподвижные опоры 14 скреплены с основанием 1 с возможностью смещения их вдоль рычагов 15 - 19. Подвижные шарниры крайних рычагов 15, 16, 18 и 19и геометрические центры жестких перемычек 4, скрепляющих попарно угфугие элементы 2 и 3, соединены между собой тягами 20 И 21. На свободных концах взаимодействующих рычагов 15 и 16, 17 и 18 смонтированы бесконтактные электрические преобразователи соответственно 22 и 23, например, индуктивные с возможностью их перемещения вдоль и поперек рычагов. Преобразователь. 8 двух взаимно перпендикулярных сил также оборудован аналогичными измерительными преобразователями 24 и 25. Многокомпонентный стенд для измерения силомоментных нагрузок работает следующим образом. Под действием внешних сил и моментов, например, аэродинамических или гидродинамических, приложенных к испытываемому изделию 7, силоприемная рама 6, перемещаясь в вертикальном направлении и вокруг горизонтальных осей X и Z,воздействует через четыре стойки 5 на четыре упругих элемента 2 и 3, которые деформируясь, производят силовое замыкание компонент РЧ, MX и MTJ на основание 1.. Одновременно силовая рама 6, перемещаясь в горизонтальной плоскости, приводит в действие через жесткое в этом направлении кольцо однокольцевой цилиндрической прорезной пружины 9 преобразователь 8 двух взаимно перпендикулярных сил Р, и Р. При этом происходит силовое замыкание компонентов М, Р и Р, а также разделение и измерение сил Pj. с использованием вмонтированных в преобразователь 8 двух взаимно перпендикулярных сил РХ и Р электрических преобразователей 24 и 25. Отсутствие взаимовлияния компонентов Pjt, Р и Ми. в преобразователе 8 3 двух взаимно перпендикулярных сип обеспечивается большой разножесткост и симметричным расположением стержней его упругого элемента в направл нии неизмеряемых и измеряемых компо нентов, а присоединенная к нему одн кольцевая цилиндрическая прорезная пружина 9 разгружает преобразовател 8 двух взаимно перпендикулярных сил от действия вертикальной силы Р. и моментов MX и Mg вследствие ее мало жесткости в этих направлениях. В результате производится силово замыкание на основание 1 всех дейст вующих-на стенд сил и моментов. Измерение остальных измеряемых компонентов Рд и М производится пу тем преобразования перемещений, снятых с геометрических центров жестких перемычек 4, соединяющих упругие элементы 2 и 3. Эти перемещения, вызванные действием силомоментной нагрузки Р и М на упругие элементы 2 и 3, через жесткие перемычки 4 и тяги 10 и 21 приводят в действие рычажный механизм 11 для разделения силомоментной нагрузки. В результате геометрический центр перемьики 4, соединяющей упругие элементы 2 (при заданных на фиг. 2 направлениях действия сил и моментов) , будет при действии одной вертикальной силы Ру иметь перемещение Ад (фиг.5), равное половине величи ны этой силы, деленной на приведенную жесткость упругих элементов 21 д 2 Za Аналогично, в том же месте от мо мента М{, действующего вокруг оси Z, возникает перемещение (фиг.6), равное этому моменту, отнесенному к расстоянию L между геометрическим центрами обеих перемычек 4 и приведенной жесткости упругих элементов 2 л Ml LZl В результате действия обеих компонентов тяга 21 передает на соединенные ею концы рычагов 15 и 19 перемещение (фиг.7), равное сумме полученных перемещений: I „ /РЧ Ws . 54 Соответственно тяга 20, передающая на рычаги 16 и 18 перемещение от жесткой перемычки 4 упругих элементов 3 (фиг.7), будет иметь ход д 1 (РЛ Mi) i Z, 2 L Рабочие перемещения и Дзх между свободными концами взаимодействующих рычагов 15 - 17 определяется (фиг.7) как сумма и разность перемещений й , умноженных на передаточные отношения соответствующих рычагов ---it)) д, k(Ei + УН) it(P Mj) i L z/2 L При обеспечении равенства передаточных отношений, отнесенных к соответствующим жесткостям Z и Z упругих элементов 2 и 3 (что является условием независимого измерения Компонентов), на преобразователях 22 и 23 перемещений образуются рабочие хода Apj и Дмг , а, следовательно, и электрические сигна в 1, пропорциональные выделяемым величинам внешних сил PV и момента М, т.е. при ii k ift и ii ii f7 rjГТ n получим Рм- 23-4 -РГ P.J-U23-Y T..При этом коррекция передаточных отношений рычагов с целью устранения взаимовлияния компонентов достигается поочередным нагружением стенда влияющими нагрузками и перемещением электрических измерительных преобразователей 21 и 23 вдоль рычагов 15 18 до тех пор, пока действие влияющей нагрузки не прекратится. Под действием влияющего момента Mjf упругие элементы 2 и 3 также будут деформированы (в разных направлениях) , однако, их перемещения вызовут только поворот жестких перемычек 4 вокруг оси X, не вызывая перемещения тяг 20 и 21 в измеряемом вертикальном направлении, что обеспечивает отсутствие влияния этой компоненты на измерение Pjj и Мь
Введение регулировочных приспособлений для перемещения с последующим закреплением неподвижных опор 14 рычажного механизма 11 для разделения силомоментной нагрузки позволяет устанавливать и при необходимости изменять передаточные отношения рычагов, а., следовательно, и чувствительность стенда по Рц и М, а перемещением измерительных преобразователей 22 и 23 - устанавливать необходимые соотношения между реальными жесткостями и передаточными отношениями взаимодействующих между собой пар рычагов с целью компенсации возможной некоторой геометрической и силовой асимметрии силовой упругой системы 10 стенда, а, следовательно, и устранения взаимовлияния компонентов Р и Mj друг на друга. 6
Использование предлагаемого степда позволяет проводить испытания моделей- судовых и авиационных конструкций, в.частности в опытных бассейнах в условиях вибрации буксировочного средства и воздействия на модель волновых нагрузок, благодаря исключению силового воздействия на рычажный
механизм для разделения силомоментной нагрузки и преобразователь двух взаимно перпендикулярных сил, что приводит к повьш1ению точности измерения и расш;нрения области рабочих
частот, а также уменьшить взаимовлияние компонентов, расположив центры шарниров вертикальных стоек и однокольцевой прорезной цилиндрической пружины в одной плоскости, и упростить юстировку стенда путем введения регулировочных приспособлений. -гJ
Фиг,/ nZZIIT .лг
ГГ
-I-f
21 9
25
Фиг Л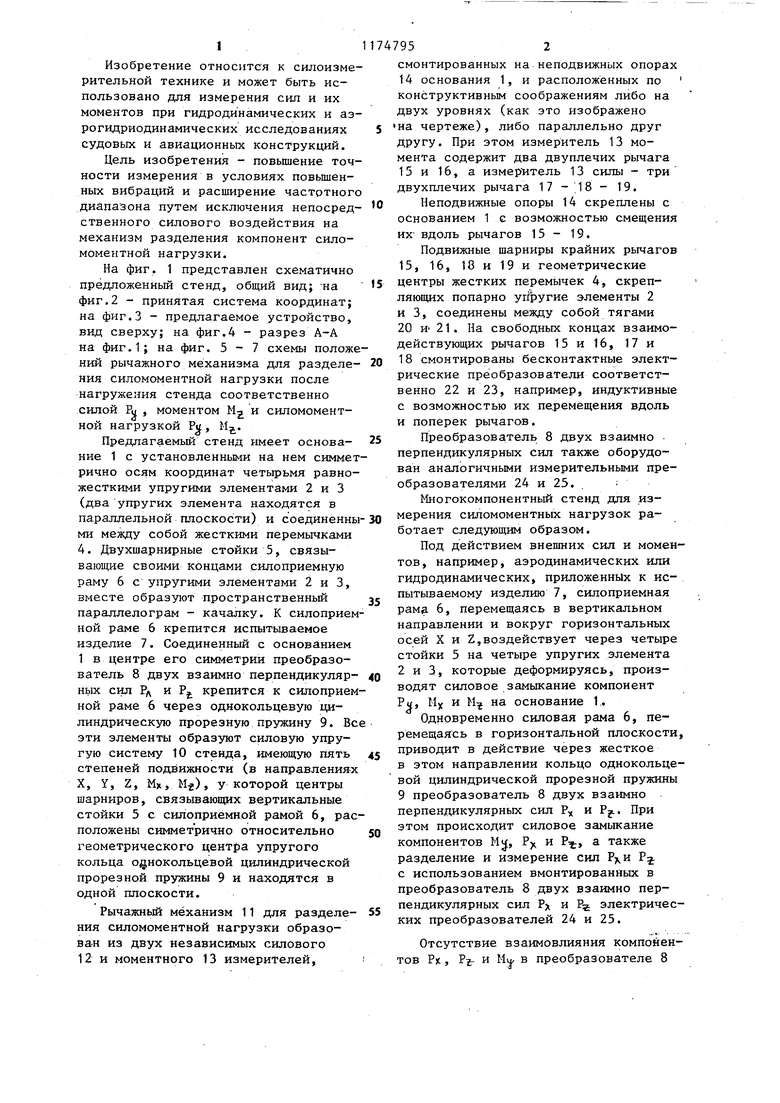
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокомпонентный стенд для измерения силомоментных нагрузок | 1989 |
|
SU1633296A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ КОМПОНЕНТОВ СИЛЫ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ | 2004 |
|
RU2276279C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2250446C2 |
| Стенд для измерения нагрузок, воздействующих на объект авиационной техники | 2017 |
|
RU2651627C1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ МЕХАНИЧЕСКИХ УСИЛИЙ | 1998 |
|
RU2168709C2 |
| Устройство управления | 1990 |
|
SU1795437A1 |
| ВСЕСОЮЗНАЯ I Г!'т;;п 'Т-'-'!.'"- с'^ч* !Л!1 о'/ • : !. »<;;. , , I >&^;V | 1973 |
|
SU366377A1 |
| Способ и устройство для испытания стрелкового оружия и/или стендовых испытаний ракетных двигателей | 2023 |
|
RU2799168C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИМПУЛЬСНОЙ РЕАКТИВНОЙ СИЛЫ ТЯГИ ЖРД МТ | 2011 |
|
RU2478924C1 |
| Способ градуировки измерительного преобразователя силы сжатия | 1980 |
|
SU1006955A1 |
1. МНОГОКОМПОНЕНТНЫЙ СТЕНД ДЛЯ ИЗЖРЕНИЯ СИЛСМОМЕНТНЫХ НАГРУЗОК, содержащий силоприемную раму, основание и связанный с ним рычажный механизм разделения компонент силомоментной нагрузки, а также связанный с основанием, и силоприемной рамой преобразователь поперечной нагрузки, отличающийся тем,что, с целью повышения точности измерения в условиях повышенных вибраций и расширения частотного диапазона путем исключения непосредственного силового воздействия на механизм разделения компонент силомоментной нагрузки, в него введены две жесткие перемычки, центры симметр ии которых шарнирно соединены с рычажным механизмом разделения компоненг силомоментной нагрузки, цилиндрическая рорезная пружина, закрепленная одним концом на основании, четыре тяги, одни концы которых шарнирно прикреплены к силоприемной раме, к центру симметрии которой прикреплен другой конец цилиндрической прорезной пружины, четыре упругих элемента, края которых прикреплены к основанию, а средние части прикреплены к соответствующим концам жестких перемычек и шарнирно к другим концам тяг, 2. Стенд по п. 1, отличающийся тем, что рычажный механизм разделения компонент силомоментной нагрузки содержит два измерительных преобразователя, две штанги, пять опор и пять двуплечих рычагов, шарнирно установленных посредством опор на основании, при этом одно плечо первого двуплечего рычага через первый измерительный преобразователь связано с одним плечом второго двуплечего рычага, другое плечо которого шарнирно соединено через одну штангу с одним плечом третьего двуплечего рычага, другое плечо которого через второй измерительный преобразователь соединено с одним Ч плечом четвертого двуплечего рычага, к| другое плечо которого шарнирно соединено с одним плечом пятого двуплече:о |Го рычага, другое плечо которого через вторую, штангу шарнирно соединено СП с другим плечом первого двуплечего рычага, причем опоры выполненыс обеспечением возможности регулировки центра качания двуплечих рычагов.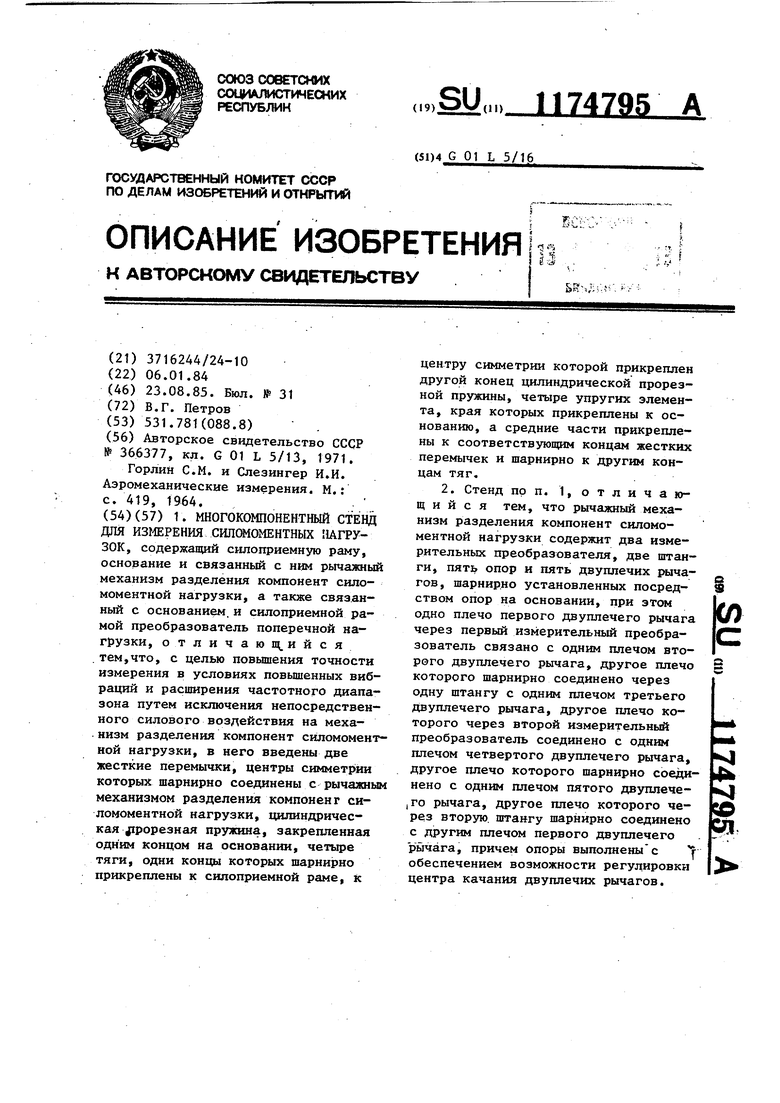
| ВСЕСОЮЗНАЯ I Г!'т;;п 'Т-'-'!.'"- с'^ч* !Л!1 о'/ • : !. »<;;. , , I >&^;V | 0 |
|
SU366377A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Горлин С.М | |||
| и Слезингер И.И | |||
| Аэромеханические измерения | |||
| М.: с | |||
| Устройство для биологического очищения сточных вод | 1924 |
|
SU419A1 |
