Изобретение относится к силоизмери- тельной технике гидродинамических и аэрогидродинамических исследований.
Цель изобретения - повышение точности и определение полного вектора силы, обеспечение измерения дополнительно двух компонентов, составляющих вектор силы, действующий на изделие.
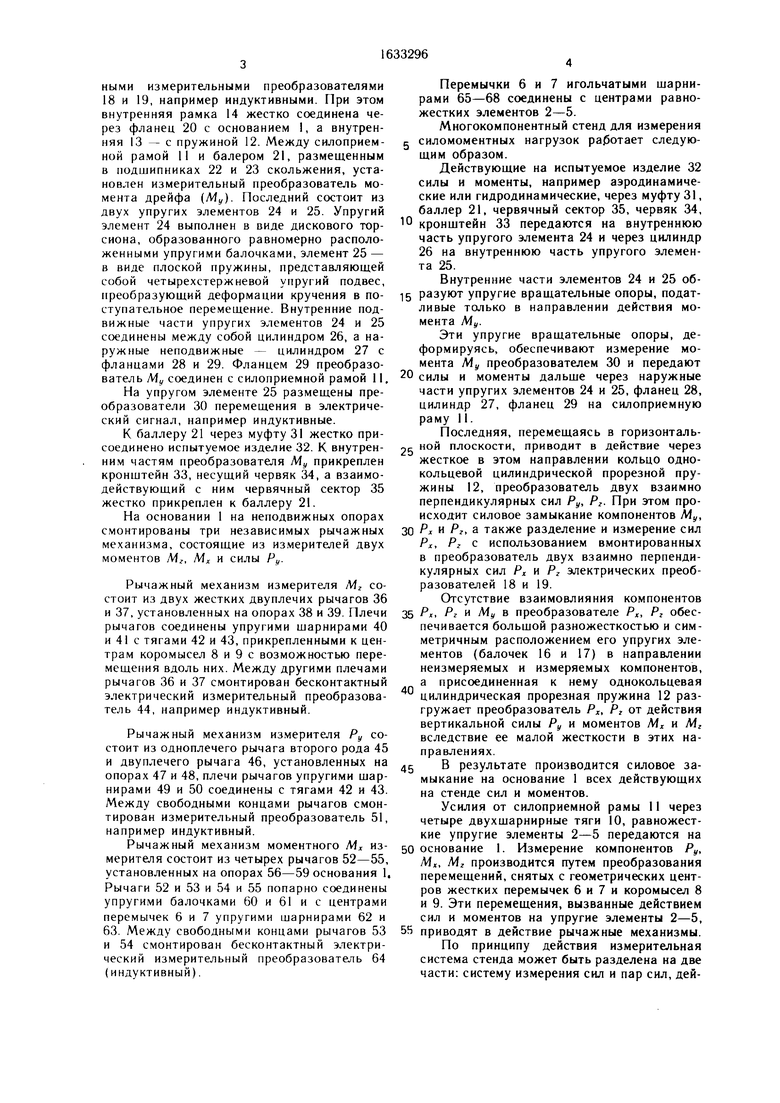
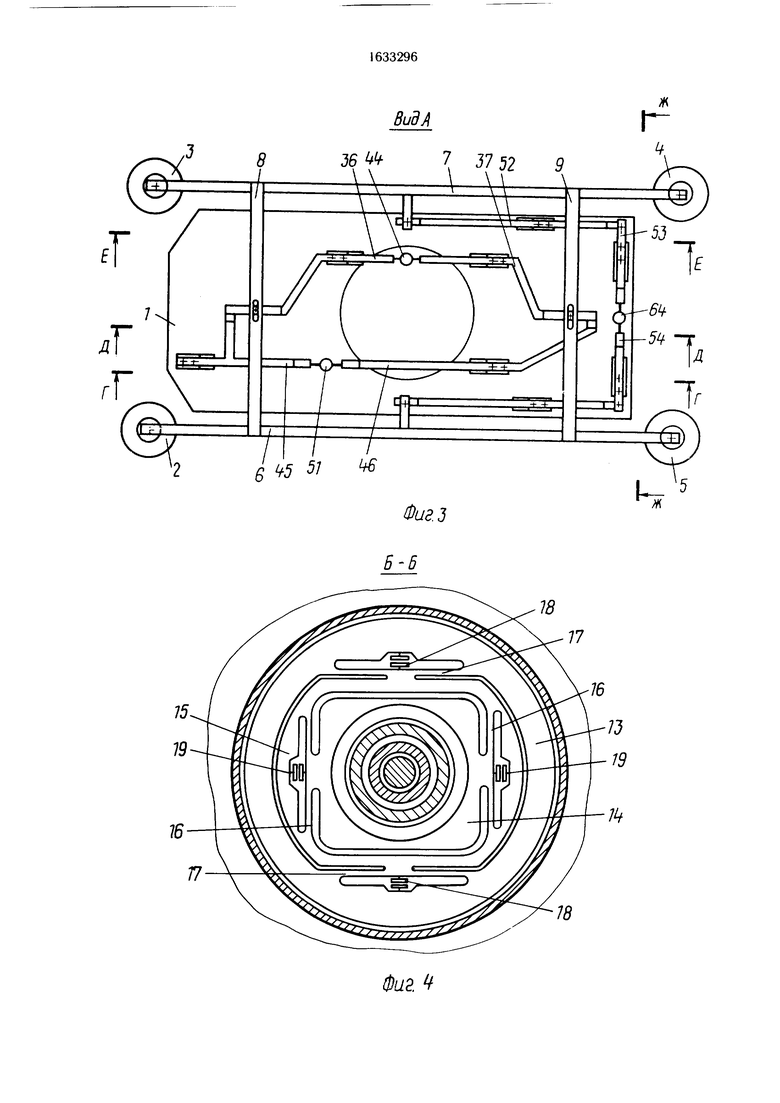
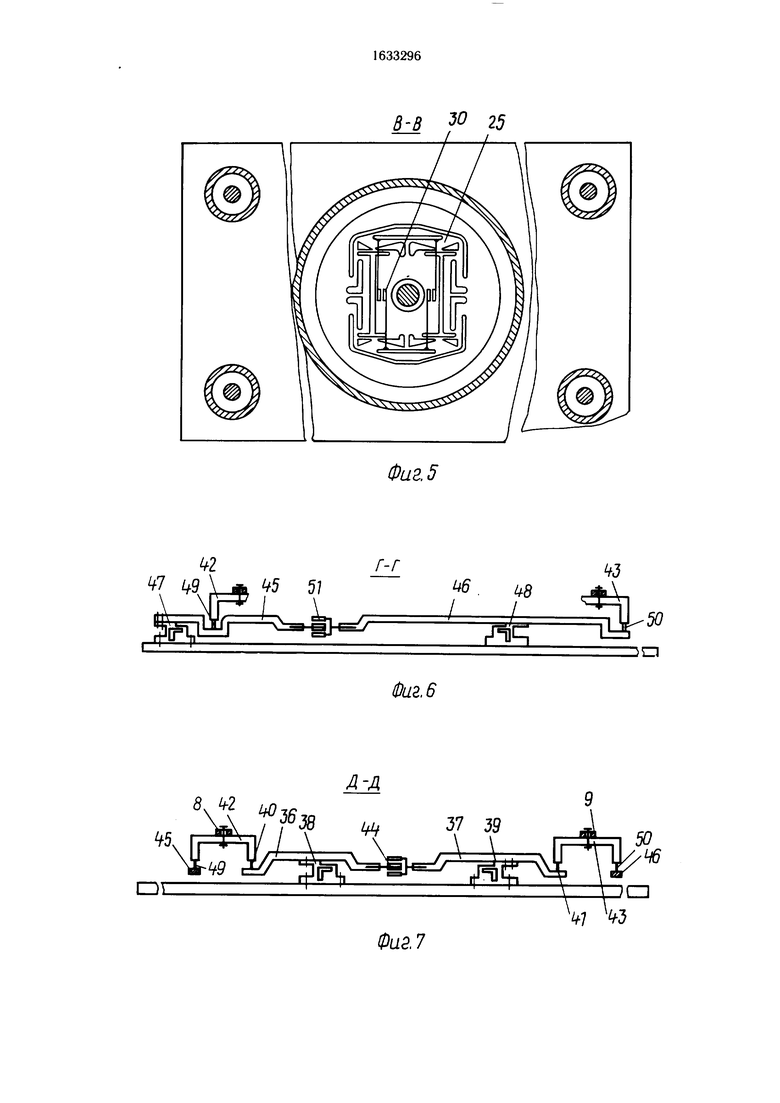
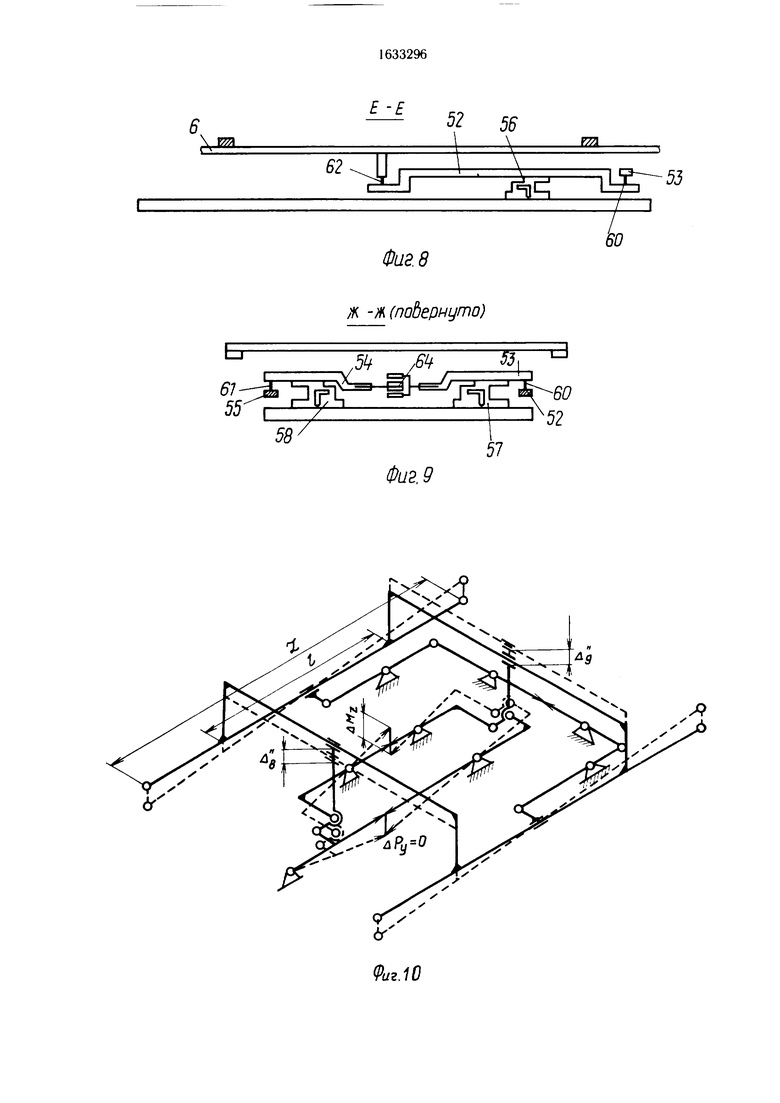
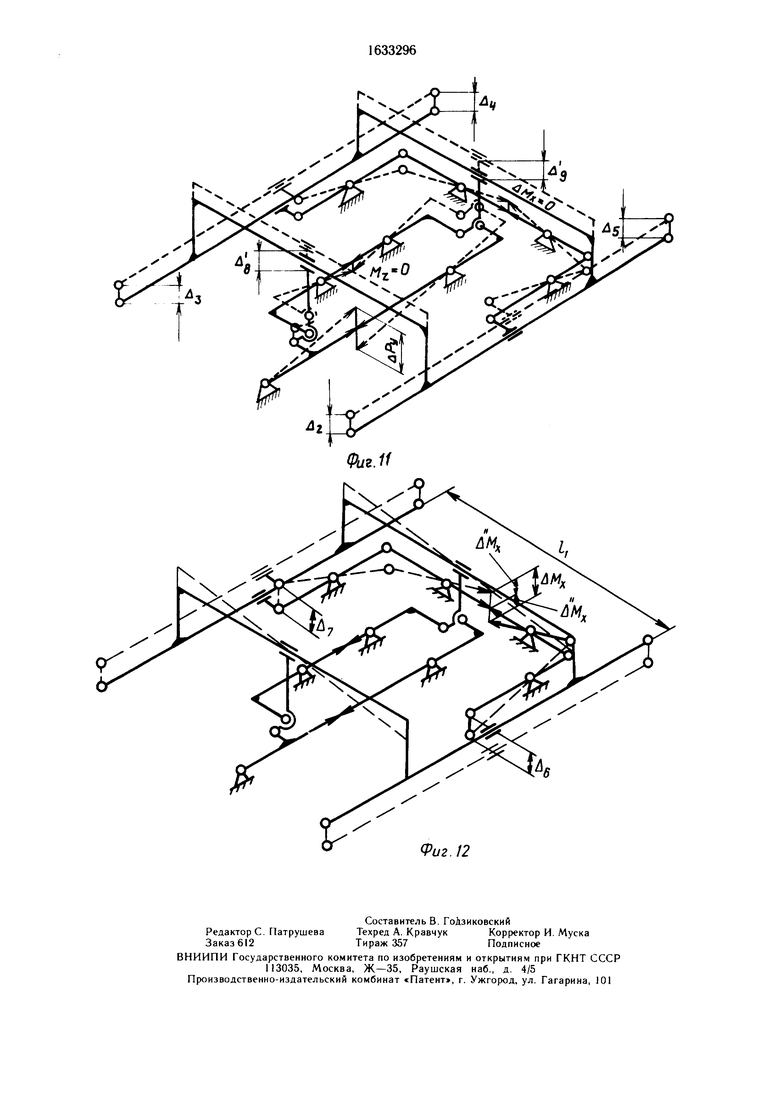
На фиг. 1 изображен стенд, общий вид; на фиг. 2 - система координат; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - разрез В-В на фиг. 1; на фиг. 6 - разрез Г-Г на фиг. 3; на фиг. 7 - разрез Д-Д на фиг. 3; на фиг. 8 - разрез Е-Е на фиг. 3; на фиг. 9 - разрез Ж-Ж на фиг. 3; на фиг. 10-12 - схемы перемещения рычагов стенда от воздействия Мг, Ру и Мх, соответственно.
Стенд содержит основание 1 с установленными на нем симметрично осям координат четырьмя равножесткими упругими элементами 2-5 шарнирно соединенными попарно двумя жесткими перемычками 6 и 7, которые жестко связаны друг с другом коромыслами 8 и 9. Четыре двухшарнирные тяги 10, связывающие своими концами сило- приемную раму 11 с упругими элементами 2-5, вместе образуют пространственный параллелограмм-качалку. Между силоприем- ной рамой 11 и основанием 1 в геометрическом центре установлен преобразователь двух взаимно перпендикулярных сил А, Р.. жестко соединены с основанием 1, а с си- лоприемной рамой 11 - через однокольце- вую прорезную пружину 12.
Все эти элементы образуют силовую упругую систему стенда, имеющую пять степеней подвижности в направлениях A, Y. Z,
М„ М,
Преобразователь Рх, Рг представляет собой упругую систему, образованную из трех концентрично расположенных жестких рамок.
Наружная рамка 13 и внутренняя рамка 14 соединены со средней подвижной рамкой 15 упругими балочками 16 и 17 малой поперечной жесткости в направлении измеряемого усилия и оборудованы бесконтакто
СО СО N5
СО 05
ными измерительными преобразователями 18 и 19, например индуктивными. При этом внутренняя рамка 14 жестко соединена через фланец 20 с основанием 1, а внутренняя 13 - с пружиной 12. Между силоприем- ной рамой 11 и балером 21, размещенным в подшипниках 22 и 23 скольжения, установлен измерительный преобразователь момента дрейфа (Му). Последний состоит из двух упругих элементов 24 и 25. Упругий элемент 24 выполнен в виде дискового тор- сиона, образованного равномерно расположенными упругими балочками, элемент 25 - в виде плоской пружины, представляющей собой четырехстержневой упругий подвес, преобразующий деформации кручения в поступательное перемещение. Внутренние подвижные части упругих элементов 24 и 25 соединены между собой цилиндром 26, а наружные неподвижные - цилиндром 27 с фланцами 28 и 29. Фланцем 29 преобразователь My соединен с силоприемной рамой 11.
На упругом элементе 25 размещены преобразователи 30 перемещения в электрический сигнал, например индуктивные.
К баллеру 21 через муфту 31 жестко присоединено испытуемое изделие 32. К внутренним частям преобразователя М„ прикреплен кронштейн 33, несущий червяк 34, а взаимодействующий с ним червячный сектор 35 жестко прикреплен к баллеру 21.
На основании 1 на неподвижных опорах смонтированы три независимых рычажных механизма, состоящие из измерителей двух моментов Мг, MX и силы Рч.
Рычажный механизм измерителя Mz состоит из двух жестких двуплечих рычагов 36 и 37, установленных на опорах 38 и 39. Плечи рычагов соединены упругими шарнирами 40 и 41 с тягами 42 и 43, прикрепленными к центрам коромысел 8 и 9 с возможностью перемещения вдоль них. Между другими плечами рычагов 36 и 37 смонтирован бесконтактный электрический измерительный преобразователь 44, например индуктивный.
Рычажный механизм измерителя Ру состоит из одноплечего рычага второго рода 45 и двуплечего рычага 46, установленных на опорах 47 и 48, плечи рычагов упругими шарнирами 49 и 50 соединены с тягами 42 и 43. Между свободными концами рычагов смонтирован измерительный преобразователь 51, например индуктивный.
Рычажный механизм моментного Мх измерителя состоит из четырех рычагов 52-55, установленных на опорах 56-59 основания 1. Рычаги 52 и 53 и 54 и 55 попарно соединены упругими балочками 60 и 61 и с центрами перемычек 6 и 7 упругими шарнирами 62 и 63. Между свободными концами рычагов 53 и 54 смонтирован бесконтактный электрический измерительный преобразователь 64 (индуктивный).
Перемычки 6 и 7 игольчатыми шарнирами 65-68 соединены с центрами равно- жестких элементов 2-5.
Многокомпонентный стенд для измерения силомоментных нагрузок работает следующим образом.
Действующие на испытуемое изделие 32 силы и моменты, например аэродинамические или гидродинамические, через муфту 31, баллер 21, червячный сектор 35, червяк 34, кронштейн 33 передаются на внутреннюю часть упругого элемента 24 и через цилиндр 26 на внутреннюю часть упругого элемента 25.
Внутренние части элементов 24 и 25 об- разуют упругие вращательные опоры, податливые только в направлении действия момента Му.
Эти упругие вращательные опоры, деформируясь, обеспечивают измерение момента Му преобразователем 30 и передают
0
силы и моменты дальше через наружные
части упругих элементов 24 и 25, фланец 28, цилиндр 27, фланец 29 на силоприемную раму П.
Последняя, перемещаясь в горизонтальg ной плоскости, приводит в действие через жесткое в этом направлении кольцо одно- кольцевой цилиндрической прорезной пружины 12, преобразователь двух взаимно перпендикулярных сил Ру, Р2. При этом происходит силовое замыкание компонентов Му,
0 Рх и Рг, а также разделение и измерение сил Рх, Р2 с использованием вмонтированных в преобразователь двух взаимно перпендикулярных сил Pi и Рг электрических преобразователей 18 и 19.
Отсутствие взаимовлияния компонентов
5 Рх, Рг и Му в преобразователе Р,, Рг обеспечивается большой разножесткостью и симметричным расположением его упругих элементов (балочек 16 и 17) в направлении неизмеряемых и измеряемых компонентов, а присоединенная к нему однокольцевая цилиндрическая прорезная пружина 12 разгружает преобразователь Рх, Рг от действия вертикальной силы Ру и моментов Мх и Мг вследствие ее малой жесткости в этих направлениях.
5 В результате производится силовое замыкание на основание 1 всех действующих на стенде сил и моментов.
Усилия от силоприемной рамы 11 через четыре двухшарнирные тяги 10, равножест- кие упругие элементы 2-5 передаются на
0 основание 1. Измерение компонентов Ру, MX, Мг производится путем преобразования перемещений, снятых с геометрических центров жестких перемычек 6 и 7 и коромысел 8 и 9. Эти перемещения, вызванные действием сил и моментов на упругие элементы 2-5,
5 приводят в действие рычажные механизмы.
По принципу действия измерительная
система стенда может быть разделена на две
части: систему измерения сил и пар сил, действующих в горизонтальной плоскости, и систему измерения сил и пар сил, действующих в вертикальном направлении.
Система измерения сил, действующих в горизонтальной плоскости, построенная на принципе силового разделения компонентов, представляет собой совокупность последовательно соединенных между собой измерителей Я,, Ру, Мг.
Погрешности измерения таких систем в основном определяются упругими свойствами кинематических схем, свободных от воздействия влияющих компонентов, а также стабильностью дифференциальных индуктивных преобразователей с линейной характеристикой.
Система измерения сил, действующих в вертикальной плоскости Pz, Му, Мх, имеет четыре общих силовых равножестких упругих элемента 2-5, используемых для измерения всех этих сил, а их разделение производится при помощи специального ненагруженного рычажного механизма.
Указанные точки должны лежать в плоскости, проходящей через геометрические центры шарниров 65-68, на двух осях симметрии, соединяющих середины расстояний между этими шарнирами. Тогда под действием неизмеряемых компонентов обе пары равножестких упругих элементов 2-5, расположенные по обе стороны от этих осей симметрии, будут деформированы в разных направлениях, однако их перемещения вызовут только поворот без перемещения середин перемычек 6 и 7 и коромысел 8 и 9, образующих жесткую рамку,вокруг осей симметрии, что и обеспечивает отсутствие взаимного влияния компонентов.
Однако на практике достичь равножест- кости всех четырех упругих элементов 2-5 трудно, и оси поворота жесткой рамки не совпадают с осями симметрии. В этих условиях для развязки измеряемых компонентов необходимо расположить один на другой приводные шарниры 40, 41, 49, 50 и 62, 63 на истинных осях поворота жесткой рамки.
Это достигается в процессе настройки путем приложения влияющего момента к силоприемной раме 11 и перемещения с последующим закреплением тяг 42 и 43 вдоль коромысел 8 и 9 и шарниров 62 и 63 вдоль перемычек 6 и 7 и одновременного перемещения плиты основания I до тех пор, пока действие влияющего момента на измеряемый компонент не прекратится.
Взаимовлияние компонентов окончательно устраняется коррекцией передаточных отношений рычагов путем перемещения электрических измерительных преобразователей вдоль свободных концов рычагов механизма разделения компонентов до такого положения, в котором действие влияющей нагрузки прекратится.
Использование многокомпонентного стенда для измерения силомоментных нагрузок
а
при гидро- и аэродинамических испытаниях моделей позволяет повысить точность измерения полного вектора гидро- или аэродинамических сил за счет определения всех его
составляющих компонентов, расширить область рабочих частот и уменьшить взаимовлияние компонентов благодаря исключению силового воздействия на рычажные механизмы разделения компонентов. Введение механизма поворота изделия позволяет исключить ошибки измерения, связанные с перемонтажом испытуемой модели и, следовательно, повысить точность измерений.
Формула изобретения
15
55
1. Многокомпонентный стенд для измерения силомоментных нагрузок, содержащий силоприемную раму, основание и связанный с ним рычажный механизм, состоящий из независимых силового и моментного изме20 рителей с преобразователями перемещения в электрический сигнал, преобразователь поперечной нагрузки, связанный с основанием и центром симметрии силоприемной рамы через цилиндрическую прорезную пру25 жину, четыре тяги, первые концы которых шарнирно соединены с силоприемной рамой, четыре равножестких упругих элемента, края которых прикр.-плены к основанию, а средние части их - к вторым концам тяг, и две параллельные жесткие перемычки,
30 соединяющие попарно равножесткие упругие элементы, отличающийся тем, что, с целью повышения точности и определения полного вектора силы, в него введены рычажный механизм с преобразователями перемещения в электрический сигнал, два коромысла, свя35 зывающие между собой две жесткие перемычки, соединяющие равножесткие упругие элементы, механизм поворота, измерительный преобразователь момента дрейфа, при этом рычажный механизм состоит из двух пар двуплечих рычагов, каждый из которых установлен посредством опор на основании, при этом одно плечо каждой пары рычагов соединено друг с другом через измерительный преобразователь перемещения в электрический сигнал, а другое шарнирно соеди45 нено с геометрическим центром соответственно одной из двух жестких перемычек, а на каждом из двух коромысел установлена с возможностью перемещения вдоль него и фиксации соответственно одна из тяг, несущая рычажный механизм.
50 2. Стенд по п. 1, отличающийся тем, что преобразователь момента дрейфа выполнен в виде двух плоских упругих элементов, размещенных перпендикулярно вертикальной оси симметрии силоприемной рамы и разнесенных вверх и вниз относительно преобразователя поперечной нагрузки, верхний из которых представляет собой плоскую прорезную пружину, состоящую из наружной и внутренней частей, соединенных между
1633296 78
собой упругими элементами с преобразова-ные части плоской пружины и торсиона жесттелями перемещений в электрический сигналко соединены с силоприемной рамой, а внутнижний - дисковый торсион, причем наруж-ренние жестко соединены между собой.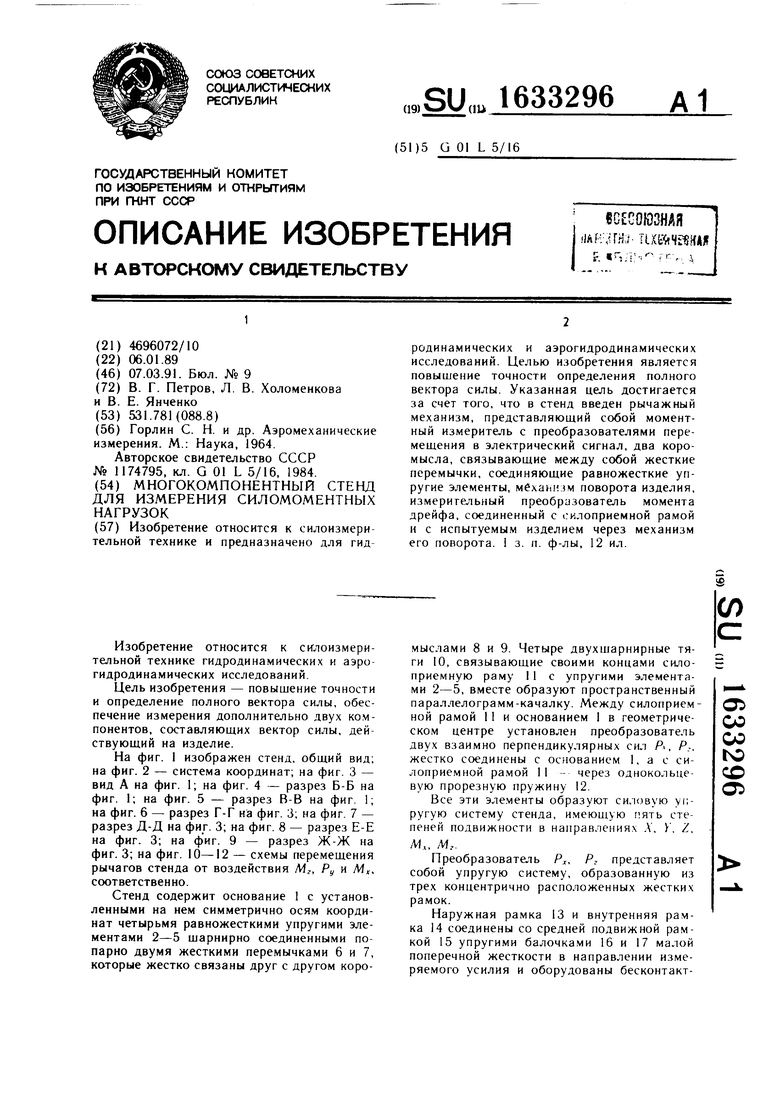
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокомпонентный стенд для измерения силомоментных нагрузок | 1984 |
|
SU1174795A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ КОМПОНЕНТОВ СИЛЫ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ | 2004 |
|
RU2276279C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2250446C2 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ МЕХАНИЧЕСКИХ УСИЛИЙ | 1998 |
|
RU2168709C2 |
| Преобразователь силы в электрический сигнал | 1976 |
|
SU661276A1 |
| Способ и устройство для испытания стрелкового оружия и/или стендовых испытаний ракетных двигателей | 2023 |
|
RU2799168C1 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК СИЛОВЫХ ВОЗДЕЙСТВИЙ | 2003 |
|
RU2251670C2 |
| Тензометрические весы для испытания моделей грибного винта | 1976 |
|
SU657265A1 |
| Многокомпонентное силоизмерительное устройство | 1990 |
|
SU1760405A1 |
| СПОСОБ И УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ СТРЕЛКОВОГО ОРУЖИЯ И/ИЛИ СТЕНДОВЫХ ИСПЫТАНИЙ РАКЕТНЫХ ДВИГАТЕЛЕЙ | 2022 |
|
RU2790353C1 |
Изобретение относится к силоизмери- тельной технике и предназначено для гидродинамических и аэрогидродинамических исследований. Целью изобретения является повышение точности определения полного вектора силы. Указанная цель достигается за счет того, что в стенд введен рычажный механизм, представляющий собой момент- ный измеритель с преобразователями перемещения в электрический сигнал, два коромысла, связывающие между собой жесткие перемычки, соединяющие равножесткие упругие элементы, механизм поворота изделия, измерительный преобразователь момента дрейфа, соединенный с оилоприемной рамой и с испытуемым изделием через механизм его поворота. 1 з. п. ф-лы, 12 ил.
55 6 54
/ //, 68,67
(Риг 2.
17
Вид А
Фигз
18
17
V
18
Фиг Ч
36
LJL
Фиг. 5
5О
Фаг. 6
Д-Д
Щ
37 39
)О
Ч Чз
Фиг.7
ЕЯ
62
д -ж (подернуто)
&
55
7
58
Е-Е
52 56
тт
Фиг. 8
I
& №
53,
52
57
Фиг. 9
Я
Фиг.Ю
Фи2.12
| Горлин С | |||
| Н | |||
| и др | |||
| Аэромеханические измерения | |||
| М.: Наука, 1964 | |||
| Многокомпонентный стенд для измерения силомоментных нагрузок | 1984 |
|
SU1174795A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
