О
to СП to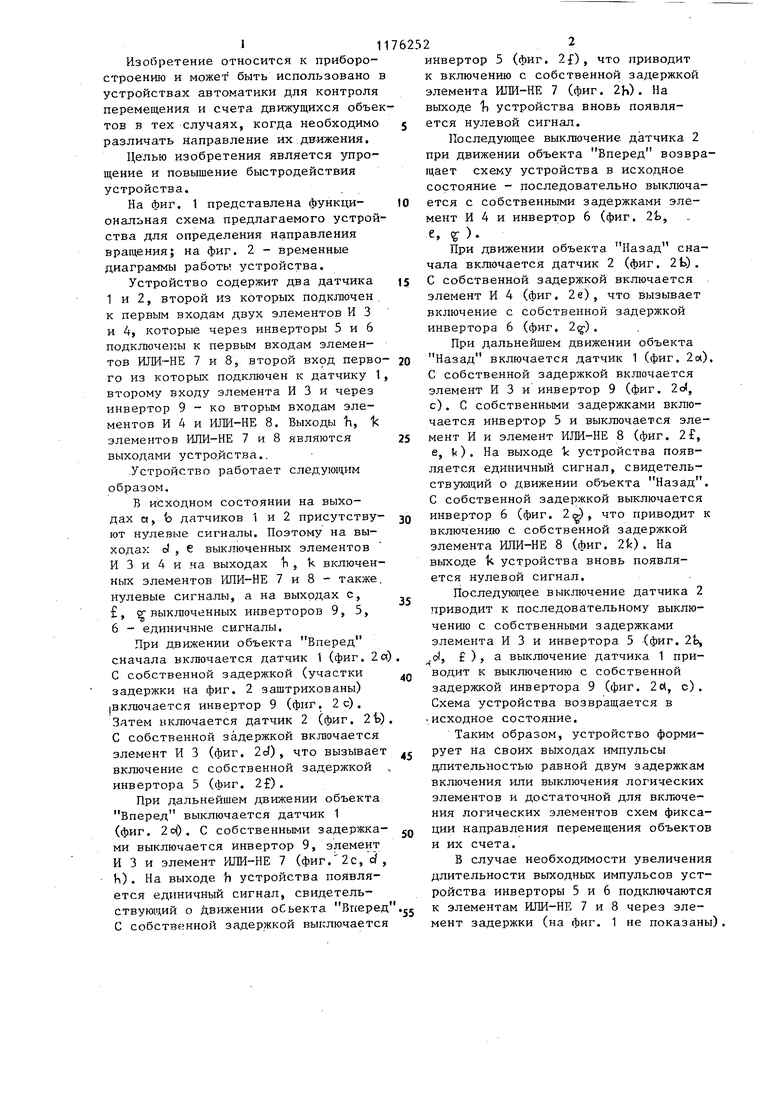
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения направления вращения | 1984 |
|
SU1176253A1 |
| Устройство для определения направления вращения | 1985 |
|
SU1283660A1 |
| Устройство для определения направления вращения | 1988 |
|
SU1569720A1 |
| Устройство для управления транзисторным инвертором | 1988 |
|
SU1646032A1 |
| Дискретный датчик перемещения | 1979 |
|
SU808940A1 |
| Устройство для задержки импульсов | 1982 |
|
SU1083353A1 |
| Устройство для управленияТиРиСТОРНыМ АВТОНОМНыМ иНВЕРТОРОМ | 1977 |
|
SU794704A1 |
| Устройство для подсчета предметов,движущихся в двух противоположных направлениях | 1982 |
|
SU1076927A1 |
| Устройство для определения направления вращения | 1989 |
|
SU1675784A1 |
| Устройство для позиционного управления приводом перемещения объекта | 1987 |
|
SU1500993A2 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ВРАЩЕНИЯ, содержащее два импульсных датчика, установленных с перекрытием зон срабатывания, первый из которых подключен к инвертору,, а второй - к первым входам двух элементов И, отличающееся тем, что, с целью упрощения и повышения быстродействия устройства, в Него дополнительно введены два элемента ШШ-НЕ и второй и третий инверторы, включенные между выходами элементов И и первыми входами элементов ИЛИ-НЕ, второй вход первого из которых подключен к выходу перЬого датчика и второму входу первого элемента И, а второй вход второго элемента ИЛИ-НЕ подключен к выходу первого инвертора и второму входу второго элемента И.
Фиг.1
« 1
Изобретение относится к приборостроению и может быть использовано в устройствах автоматики для контроля перемещения и счета движущихся объектов в тех случаях, когда необходимо различать направление их движения.
Целью изобретения является упрощение и повышение быстродействия устройства.
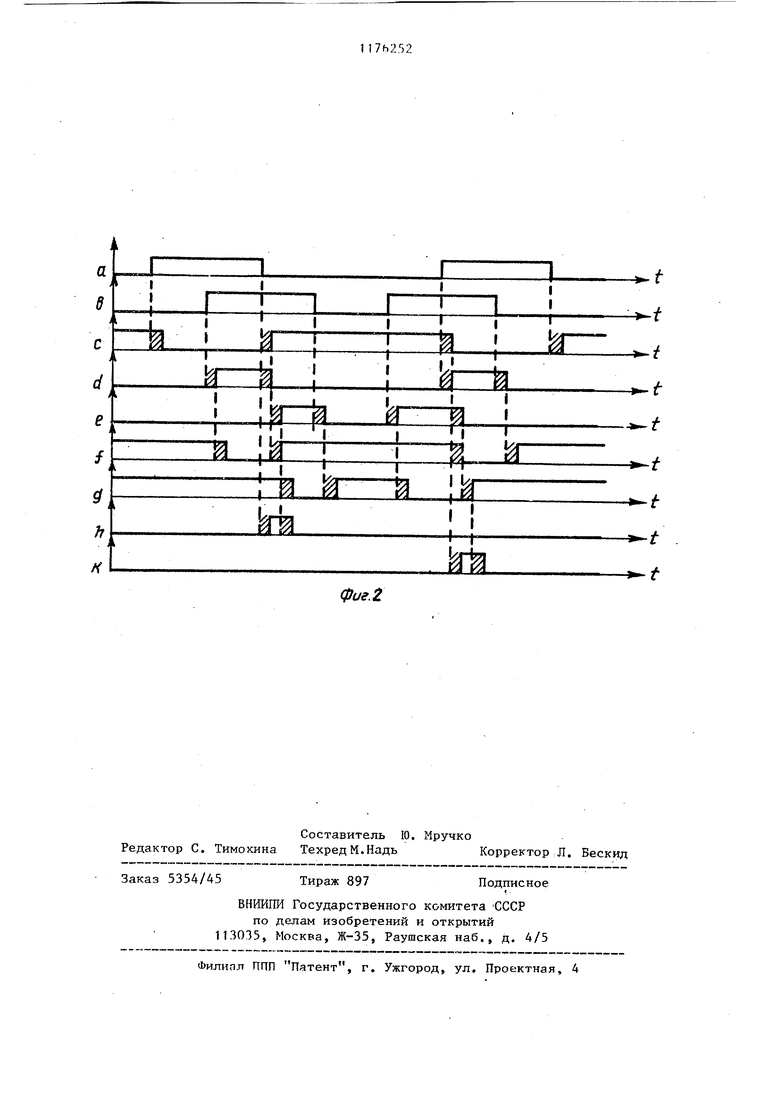
На фиг. 1 представлена функциональная схема предлагаемого устройства для определения направления вращения; на фиг. 2 - временные диаграммы работы устройства.
Устройство содержит два датчика 1 и 2, второй из которых подключен, к первым входам двух элементов И 3 и 4, которые через инверторы 5 и 6 подключены к первым входам элементов ШМ-НЕ 7 и 8, второй вход первого из которых подключен к датчику 1 второму входу элемента И 3 и через инвертор 9 - ко вторым входам элементов И 4 и ИЛИ-НЕ 8. Выходы ti, 1 элементов ИЛИ-НЕ 7 и 8 являются выходами устро.йства..
-Устройство работает следующим образом.
В исходном состоянии на выходах «, fe датчиков 1 и 2 присутствуют нулевые сигналы. Поэтому на вы- ходак о , е выключенных элементов И 3 и 4 и на выходах Ь , k включенных элементов ИЛИ-НЕ 7 и В - также. нулевые сигналы, а на выходах с, , выключенных инверторов 9, 5, 6 - единичные сигналы.
При движении объекта Вперед сначала включается датчик 1 (фиг. 2а С собственной задержкой (участки задержки на фиг. 2 заштрихованы) |включается инвертор 9 (фиг. 2с). Затем включается датчик 2 (фиг. 2t) С собственной задержкой вкл}очается элемент И 3 (фиг. 2d), что вызывает включение с собственной задержкой инвертора 5 (фиг. 2).
При дальнейшем движении объекта Вперед выключается датчик 1 (фиг. 2с(). С собственными задержками выключается инвертор 9, элемент И 3 и элемент ИЛИ-НЕ 7 (фиг.2с, dl , Ь) . На выходе 1i устройства появляется единичный сигнал, свидетельСТВУЮ1ЧИЙ о движении оСьекта Вперед С собственной задержкой выключается
22
инвертор 5 (фиг. 2f), что приводит к включению с собственной задержкой элемента ШШ-НЕ 7 (фиг. 2Ь) . На выходе li устройства вновь появляется нулевой сигнал.
Последующее выключение датчика 2 при движении объекта Вперед возвращает схему устройства в исходное состояние - последовательно выключается с собственными задержками элемент И 4 и инвертор 6 (фиг. 2t,
е, ).
При движении объекта Назад сначала включается датчик 2 (фиг. 2Ь).
С собственной задержкой включается элемент И 4 (фиг, 2е), что вызывает включение с собственной задержкой инвертора 6 (фиг. 2) .
При дальнейшем движении объекта
Назад включается датчик 1 (фиг. 2oi). С собственной задержкой включается элемент И 3 и инвертор 9 (фиг. 2о(, с). С собственными задержками включается инвертор 5 и выключается элемент И и элемент ИЛИ-НЕ 8 (фиг. 2f, е, V) . На выходе 1 устройства появляется единичный сигнал, свидетельствующий о движении объекта Назад. С собственной задержкой выключается
инвертор 6 (фиг. 21), что приводит к включению с собственной задержкой элемента ИЛИ-НЕ 8 (фиг. 21с). На выходе k устройства вновь появляется нулевой сигнал.
Последующее выключение датчика 2 приводит к последовательному выключению с собственными задержками элемента И 3 и инвертора 5 (фиг. 2k, d, ), а выключение датчика 1 приводит к выключению с собственной
задержкой инвертора 9 (фиг. 2и, с). Схема устройства возвращается в ,исходное состояние.
Таким образом, устройство формиРУет на своих выходах импульсы
длительностью равной двум задержкам включения или выключения логических элементов и достаточной для включения логических элементов схем фиксадии направления перемещения объектов и их счета.
В случае необходимости увеличения длительности выходных импульсов устройства инверторы 5 и 6 подключаются
к элементам ИЛИ-НЕ 7 и 8 через элемент задержки (на фиг. 1 не показаны).
фиг.2
| Дискретный датчик перемещения | 1979 |
|
SU808940A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шляндин В.М | |||
| Цифровые измерительные устройства | |||
| М.: Высшая школа, 1981, с | |||
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
