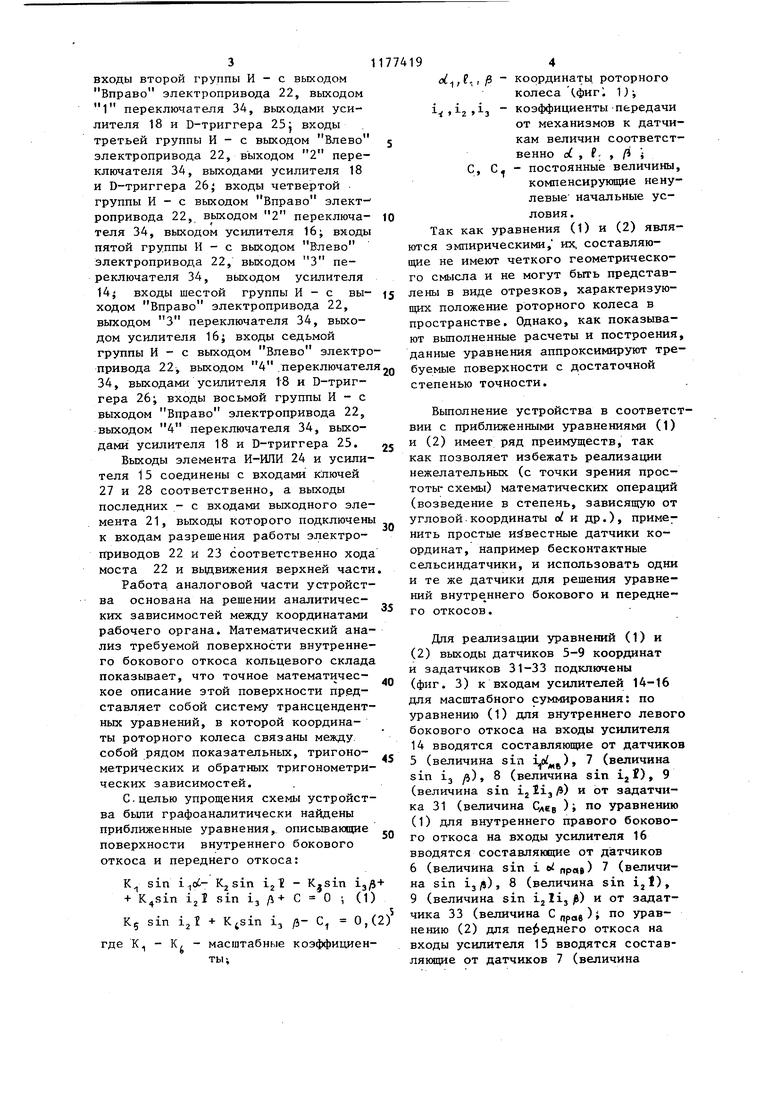
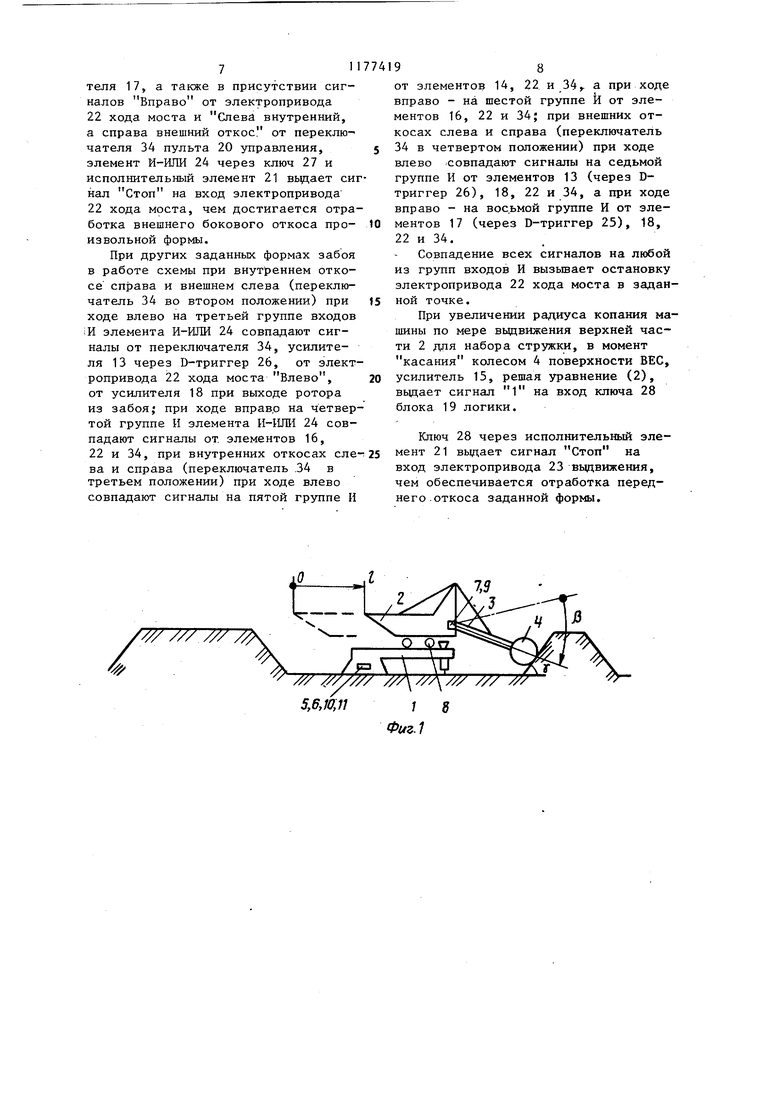
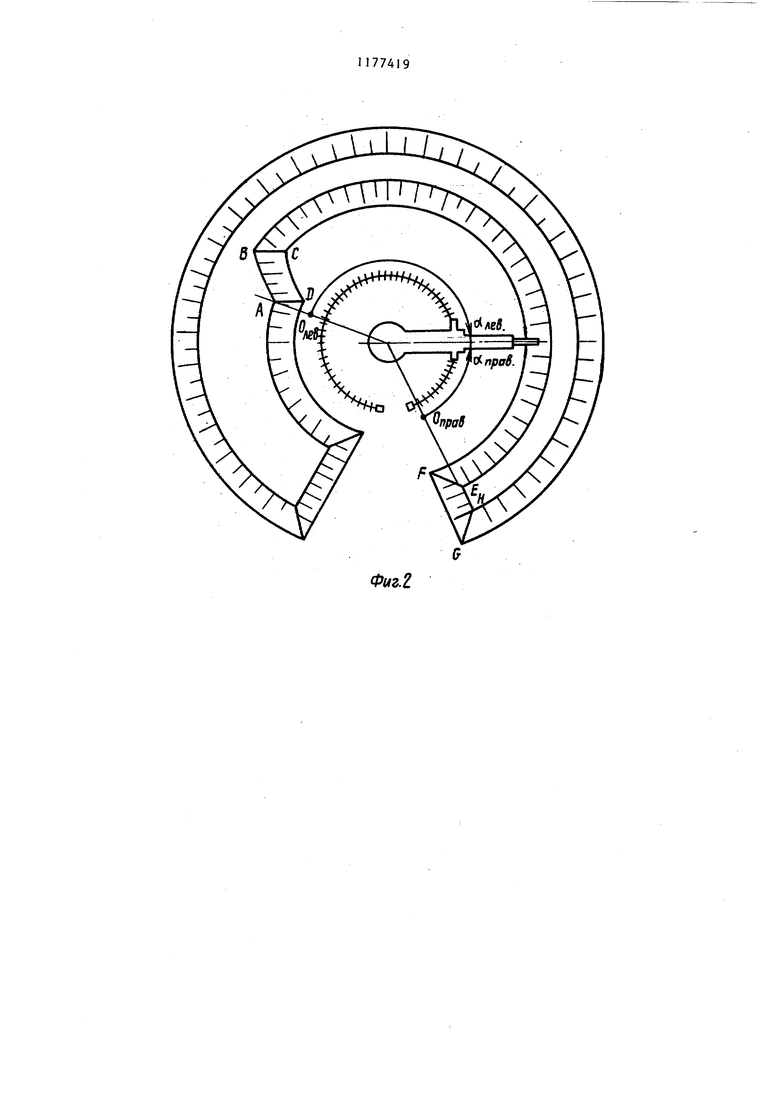
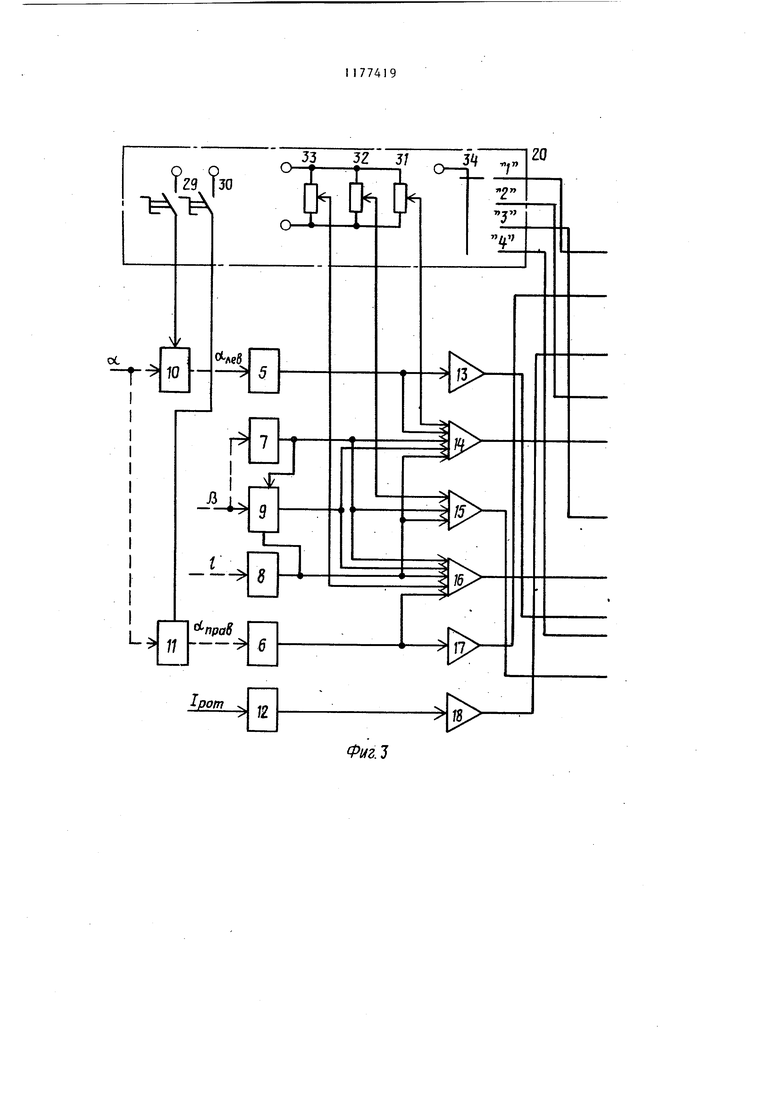
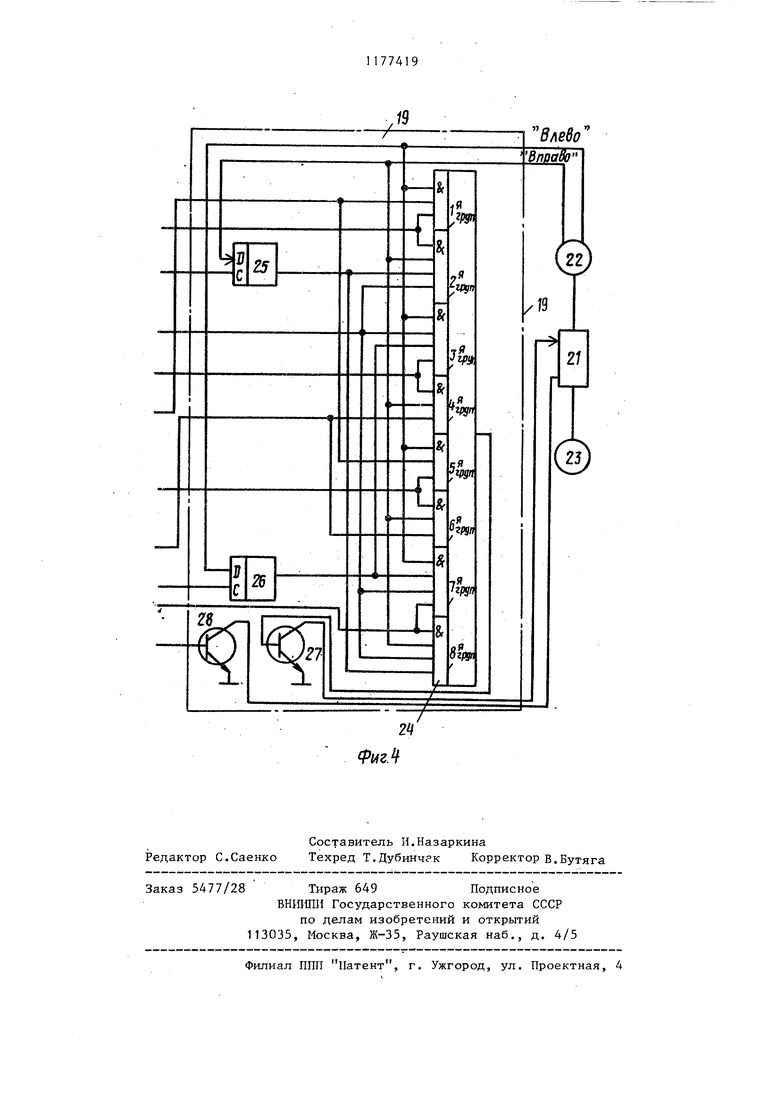
1 . 1 Изобретение относится к устройст вам программного управления роторно погрузочной машиной и может быть использовано в погрузочно транспорт ных и экскавационных машинах. Цель изобретения - повьш1ение надежности и расширение функциональны возможностей устройства программного управления. Устройство позволяет автоматизировать отработку.как забоев роторными экскаваторами с невьщвижной или вьщвижной стрелой с углом поворота до 180, так и кольцевых складов роторными погрузочными машинами с любым углом поворота в плане, внутренними боковыми откосами с заданным углом откоса и горизонтальны ми сечениями типа спиралей, внешними боковыми откосами любой формы и переднего откоса с заданным углом откоса. На фиг. 1 изображена схема отраб ки кольцевого склада полезных ископаемых с помощью роторной погрузочной машиныJ на фиг. 2 - то же, вид в плане, на фиг. 3 и 4 - функци нальная схема предлагаемого устройства. Устройство программного управления установлено на роторной погрузо ной машине (фиг. 1 и 2), которая содержит мост 1, вьщвижную верхнюю часть 2 со стрелой 3 и роторным колесом 4. Для определения положения в простраяствеРоторного колеса 4 устройство программного управления содержит датчик 5 угла поворота машины в плане (относительно левого начешьного радиуса копания ОА «.лев), датчик 6 угла поворота машины в плане (относительно правого начального радиуса копания ОЕ о прскв ), датчик 7 угла наклона стрелы 3 относительн ее крайнего верхнего положений (угол J) , датчик 8 величины вьщвижения верхней части 2 относительно ее кра него заднего положения (величина t) и блок 9 произведения функций угла наклона р и величины вьщвижения верхней части машины t. Датчики -5 и 6 снабжены блоками 10 и 11 дистанционной установки в О с соответст вующими начальными радиусами ОА и О Для определения, величины нагрузки (.HHa tpj) электропритюда poTopHoio колеса 4 усталовтен дат92JHK 12 нагрузки роторного .колеса 4 (фиг. 3). Решающая часть устройства (фиг.З и 4) содержит операционные усилители 13-18, блок- 19 управления, пульт 20 управления и исполнительный элемент 21 с электроприводами 22 и 23. . Блок 19 управления содержит логический элемент И-1ШИ 24, имеющий восемь групп входов И, два D-триггера 25 и 26, два ключа 27 и 28 (например, транзисторы) . Пульт 20 управления содержит выключатели 29 и 30 (например, тумблеры), задатчики 3133 и переключатель 34. Кинематические входы блоков 10 и 11 дистанционной установки нулевых положений датчиков 5 и 6 механически связаны с осью О поворота в плане моста 1, а выходы соединены с входами датчиков 5 и 6 соответственно. Электрические входы узлов 10 и 11 соединены с выходами выключателей 29 и 30 пульта 20 управления. Входы датчиков 7 и 9 соединены с осью качания стрелы 3, вход датчика 8 - с механизмом вьщвижения верхней части 2, а его выход - с электрическим входом.датчика 9. Входы усилителей 13, 17 и 18, включенных по схеме компараторов, соединены с выходами датчиков 5, 6 и 12 соответственно. Усилители 14-16 включены по схеме масштабного суммирования. Входы усилителя 14 соединены с выходами датчиков 5, 7, 8 и 9 и с выходами задатчика 31 пульта 20 управления, входы усилителея 15 с выходами датчиков 7 и 8 и задатчика 32 пульта 20 управления; входы усилителя 16 - с выходами датчиков 6-9 и задатчика 33 пульта 20 управления. Управляющие входы (С-входы) D-триггеров 25 и 26 соединены с выходами усилителей 17 и 13 соответственно. Информационные входы (D-ВХОДЫ) D-триггеров 25 и 26 соединены с выходами электропривода 22 хода моста, информирующими о направлении поворота машины в плане Вправо или Влево соответственно. Входы восьми групп входов И элемента И-ИЛИ 24 блока 19 управления соединены следующим образом: входы первой группы И - с выходом Влево электропривода 22 хода моста, выходом 1 переключателя 4 пульта , 20 управления, ньтхолом уси.пмтр.ля 14; входы второй группы и - с выходом Вправо электропривода 22, выходом 1 переключателя 34, выходами усилителя 18 и D-триггера 25j входы третьей группы И - с выходом Влево электропривода 22, выходом 2 переключателя 34, выходами усилителя 18 и D-триггера 26 входы четвертой группы И - с выходом Вправо электропривода 22, вькодом 2 переключателя 34, выходом усилителя 16; входы пятой группы И - с выходом Влево электропривода 22, выходом 3 переключателя 34, выходом усилителя 14 входы шестой группы И - с выходом Вправо электропривода 22, выходом 3 переключателя 34, выходом усилителя 16; входы седьмой группы И - с выходом Влево электро привода 22, выходом 4.переключател 34, выходами усилителя IB и D-триггера 26; входы восьмой группы И - с выходом Вправо электропривода 22, выходом 4 переключателя 34, выходами усилителя 18 и D-триггера 25, Выходы элемента И-ИЛИ 24 и усилителя 15 соединены с входами ключей 27 и 28 соответственно, а выходы последних - с входами выходного элемента 21, выходы которого подключены к входам разрешения работы электроприводов 22 и 23 соответственно хода моста 22 и выдвижения верхней части Работа аналоговой части устройства основана на решении аналитических зависимостей между координатами рабочего органа. Математический анализ требуемой поверхности внутреннего бокового откоса кольцевого склада показывает, что точное математическое описание этой поверхности представляет собой систему трансцендентных уравнений, в которой координаты роторного колеса связаны между, собой рядом показательных, тригонометрических и обратных тригонометрических зависимостей. С.целью упрощения схемы устройства были графоаналитически найдены приближенные уравнения, описьшающие поверхности внутреннего бокового откоса и переднего откоса: К sin KjSin iz 12 - 1з + ijl sin ij /i-b С 0 ; (1) Kg sin i2 + Kjsin ij /j- C 0,( где K - K - масштабные коэффициенты-. ,, координаты, роторного колеса Чфиг 1} -, коэффициенты передачи от механизмов к датчикам величин соответственно о{ , р. , /J i С, С. - постоянные величины, компенсирукнцие ненулевые начальные условия . Так как уравнения (1) и (2) являются эмпирическими, их. составляющие не имеют четкого геометрического смысла и не могут быть представлены в виде отрезков, характеризуюпщх положение роторного колеса в пространстве. Однако, как показывают вьшолненные расчеты и построения, данные уравнения аппроксимируют требуемые поверхности с достаточной степенью точности. Выполнение устройства в соответствии с приближенными уравнениями (1) и (2) имеет ряд преимуществ, так как позволяет избежать реализации нежелательньк (с точки зрения простоты- схемы) математических операций (возведение в степень, зависящую от угловой-координаты о и др.), пример нить простые известные датчики координат, например бесконтактные сельсиндатчики, и использовать одни и те же датчики для решения уравнений внутреннего бокового и переднего откосов. Для реализации уравнений (1) и (2) выходы датчиков 5-9 координат и задатчиков 31-33 подключены (фиг. 3) к входам усилителей 14-16 для масштабного суммирования: по уравнению (1) для внутреннего левого бокового откоса на входы усилителя 14 вводятся составляющие от датчиков 5(величина sin ) 7 (величина sin i /}), В (величина sin 12) 9 (величина sin ijlij) и от задатчика 31 (величина Сде ); по уравнению (1) для внутреннего правого бокового откоса на входы усилителя 16 вводятся составляюсше от датчиков 6(величина sin i ч прев) (величина sin ij)J 8 (величина sin ijt), 9 (величина sin fi) и от задатчика 33 (величина С „pag); по уравнению (2) для пе)еднего откоса на входы усилителя 15 вводятся составлякяцие от датчиков 7 (величина sin ij/e), В (величина .sin ijf) и от задатчика 32 (величина С,). Логическая часть схемы построена следующим образом. Для отработки внутреннего боково го откоса сигнал Стоп должен формироваться на входе электропривода 22 хода моста при совпадении условий: поворот происходит в направлеНИИ внутреннего откоса и уравнение (l) для данного направления движения обратилось в тождество. Для отработки внешнего бокового откоса сигнал Стоп должен формиро ваться на входе электропривода 22 ход моста при совпадении условий :пЬворот происходит в направлении внешнего откоса, машина вьшша в плане за грани цу рабочего сектора (например, маши на при движении слева направо пересекла вертикальную плоскость, проходящую через правый начальньй радиус ОЕ, фиг. 2) и рабочая нагрузка привода роторного колеса отсутст вует, т. е. колесо вышпо из забоя. Для отработки переднего откоса сигнал Стоп должен формироваться на входе электропривода 23 вьщвижения верхней части при обращении уравнения (2) в тождество. Устройство работает следующим образом. По технологии отработки штабеля формы забоя (фиг. 2) левую границу рабочего сектора машины образует внутренний боковой откос ABCD, пра вую - внешний откос BFGH. Перед началом работы машинист программирует устройство при помощи п-ульта 20 управления, переключателе 34, устанавливая его в положение 1, вводит в блок 19 управления на первую и вторую группы И элемента И-ИЛИ, 24 задание формы забоя Слева внутренний, а справа внешний откос выключателями 29 и 30 включает блоки 10 и 11, дистанционно устанавливая нулевые положения датчиков 5 и 6 поворота соответственно, на началь ных радиусах ОА и OEj задатчиками 31 и 32 вводит начальные условия в суммирующие усилители 14 и 15. Величины коэффициентов V.-., уравнений (1) и (2) и знаки сигнало поступа щих на входы усилителей 14 и 15, ус аноплелы таким образом, чт при нахождении колеса 4 в любой точ ке поверхности внутреннего бокового откоса ABCD уравнение (1) обращается в тождество, при этом сигнал на выходе усилителя 14 становится равным логической , а при установке колеса 4 в любой точке поверхности переднего откоса ВВЕС уравнение (2) обращается в тождество, при этом становится равным 1 сигнал на выходе усилителя 15. При положении колеса 4 в произвольной точке пространства сигналы на выходах обоих усилителей равны логическому О. В процессе копания при движении машины справа налево на первый и второй входы первой группы входов И элемента И-Ш1И 24 блока 19 управления поступают сигналы 1, отвечаю-, щие режимам Влево от электропривода 22 хода моста и Слева внутренний, а справа внешний откос от переключателя 34 блока 20 управления. В момент касания колесом 4 поверхности ABCD усилитель 14, решая уравнение (1), вьщает сигнал 1 на третий вход первой группы входов И элемента И-ИПИ 24 блока 19 управления. Элемент И-ИЛИ 24 через ключ 27 и исполнительный элемент 21 выдает на вход электропривода 22 хода моста сигнал Стоп, чем достигается отработка поверхности внутреннего бокового откоса по требуемому закону. При движении машины слева направо в момент ее прохождения через вертикальную плоскость, проведенную через правый начальный радиус ОЕ, датчик 6 вьщает нулевой сигнал на вход усилителя 17. Последний при этом формирует сигнал 1 на С-входе Dтриггера 25 блока 19 логики, где этот сигнал запоминается при наличии на D-входе сигнала Вправо, поступающего от электропривода 22 хода моста. При дальнейшем движении машины вправо, в момент выхода роторного колеса 4 через внешний откос произвольной формы EFGH в свободное пространство, усилитель 18, управляемый датчиком 12 нагрузкн, вьщает сигнал 1 на вх.сд второй группы И элемента И-ИЛИ 24 блока 19 логики. При появлении сигнала 1 от .усилителя 18, наличии в памяти (D-триггер 25) сигнал 1 от усили711
теля 17, а также в присутствии сигналов Вправо от электропривода 22 хода моста и Слева внутренний, а справа внешний откос от переклю-чателя 34 пульта 20 управления, элемент И-ИЛИ 24 через ключ 27 и исполнительный элемент 21 вьщает сигнал Стоп на вход электропривода 22 хода моста, чем достигается отработка внешнего бокового откоса произвольной формы.
При других заданных формах забоя в работе схемы при внутреннем откосе справа и внешнем слева (переключатель 34 во втором положении) при ходе влево на третьей группе входов :И элемента И-ИЛИ 24 совпадают сигналы от переключателя 34, усилителя 13 через D-триггер 26, от электропривода 22 хода моста Влево, от усилителя 18 при выходе ротора из забоя; при ходе вправ.о на четвертой группе И элемента И-ILrtti 24 совпадают сигналы от. элементов 16, 22 и 34, при внутренних откосах слева и справа (переключатель .34 в третьем положении) при ходе влево совпадают сигналы на пятой группе И
198
от элементов 14, 22 и 34,. а при ходе вправо - на шестой группе И от элементов 16, 22 и 34; при внешних откосах слева и справа (переключатель 34 в четвертом положении) при ходе влево совпадают сигналы на седьмой группе И от элементов 13 (через Dтриггер 26), 18, 22 и 34, а при ходе вправо - на вос.ьмой группе И от элементов 17 (через D-триггер 25), 18, 22 и 34.
Совпадение всех сигналов на любой из групп входов И вызьшает остановку электропривода 22 хода моста в заданной точке.
При увеличении радиуса копания машины по мере выдвижения верхней части 2 для набора стружки, в момент касания колесом 4 поверхности ВЕС, усилитель 15, решая уравнение (2), выдает сигнал 1 на вход ключа 28 блока 19 логики.
Ключ 28 через исполнительный элемент 21 выдает сигнал Стоп на вход электропривода 23 вьщвижения, чем обеспечивается отработка переднего.откоса заданной формы.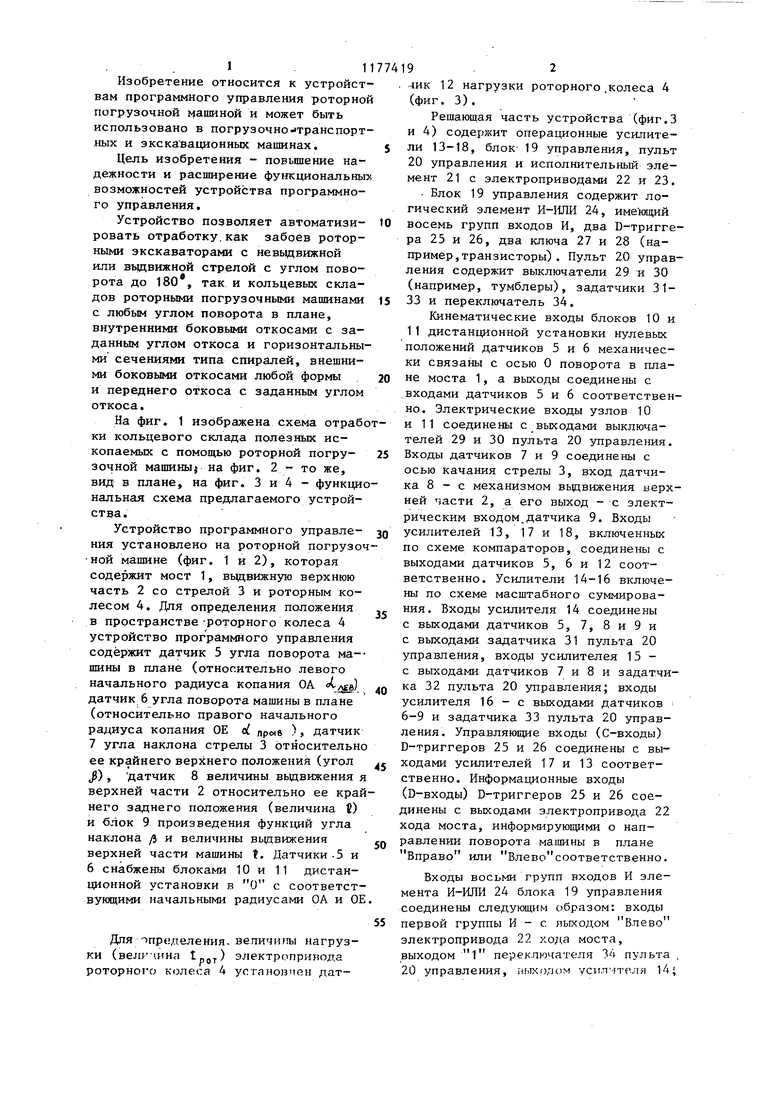
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления поворотным механизмом роторной стрелы экскаватора | 1987 |
|
SU1470879A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 2000 |
|
RU2171753C1 |
| Устройство контроля расхода воздуха для вентиляции тяговых электродвигателей транспортного средства | 1984 |
|
SU1194721A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАЗГРУЗКИ ТЯЖЕЛЫХ ФРАКЦИЙ ИЗ ОТСАДОЧНОЙ МАШИНЫ | 1991 |
|
RU2022652C1 |
| Вентильный электродвигатель | 1987 |
|
SU1508318A2 |
| Система автоматизированного управления роторным экскаватором | 1985 |
|
SU1266942A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| Электропривод переменного тока | 1989 |
|
SU1704262A1 |
УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ РОТОРНОЙ ПОГРУЗОЧНОЙ МАШИНОЙ, содержащее датчик угла поворота машины в плане, датчик угла наклона стрелы, датчик нагрузки роторного колеса и блок управления, соединенный с исполнительным элементов, отличающееся тем, что, с целью повьшения надежности программного управления, оно снабжено дополнительным датчиком угла поворота машины в плане, блоком определения произведения функции угла наклона и величины вьщвижения верхней части машины, датчиком величины выдвижения верхней части машины, блоками дистанционной установки нуля, шестью операционными усилителями и пультом управления, вьшолненным и;1 выключателей, переключателя и задатчиков, при этом выключатели подключены к узлам дистанционной установки в О, которые . W2; . -м «динены с соответствующим датчиком угла поворота машины в плане, выходы которых подключены к входам первого и пятого операционных усилителей, вькод датчика наклона стрелы подключен к одному из входов блока определения: произведения функций угла наклона и величины выдвижения верхей части машинь и к первым входам второго, третьего и четвертого операционных усилителей, выход датчика величины вьщвижения верхней части машины соединен с другим входом блока определения произведения функций угла надслона и величи9 ны вьдвижения верхней части машины и к вторым входам второго, третьего и четвертого операционных усилителей, третьи входы которых подключены к соответствукяцим задатчикам пульС та управления, при этом четвертые входы второго и четвертого операциойных усилителей подключены к выходу ч блока определения произведения функций угла наклона и величины ь вьщвижения верхней части машины,, пятые входы второго и четвертого :D операционных усилителей соединены с соответствующими датчиками угла поворота машины в плане, выходы операционных усилителей подключены к входам блока управления,-другие входы которого соединены с переключателем пульта управления, информационные входы блока управления под-, ключены к клеммам устройства Влейо Вправо,
t: ////// } Уд ///// 5,6,10,117 5 о (Эг7 Фиг. 1 /// //
-fe4-feN
Vl
L
Фиг. 5
fpMzM
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ | 0 |
|
SU203034A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
