Изобретение относится к автоматическому управлению приводом поворота роторной стрелы экскаватора и может найти применение на роторных экскава торах с невыдвижной стрелой.
Целью изобретения является повьше ние точности отработки внешнего забо роторной стрелой экскаватора.
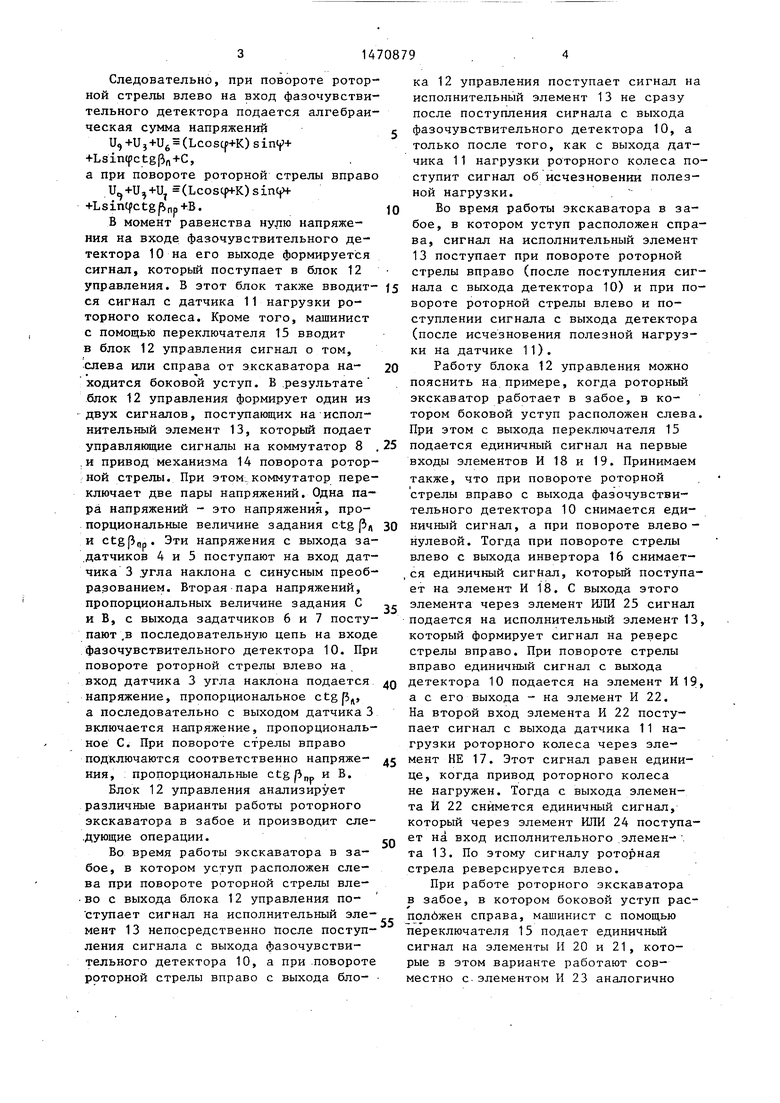
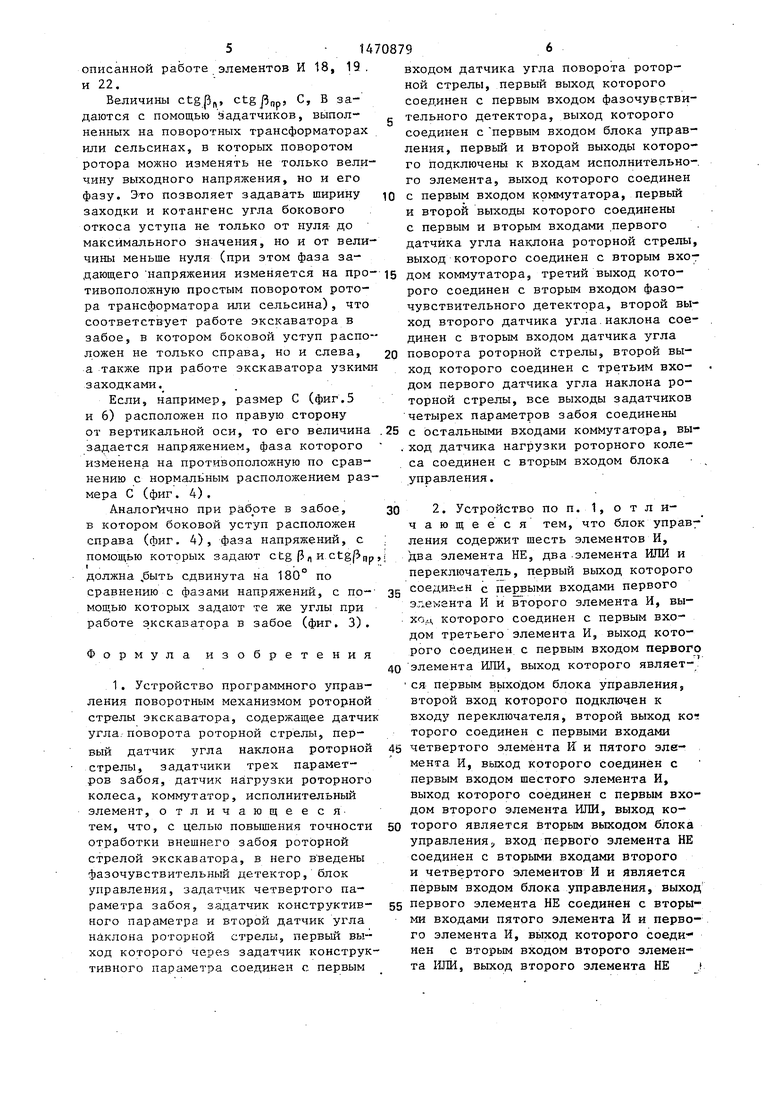
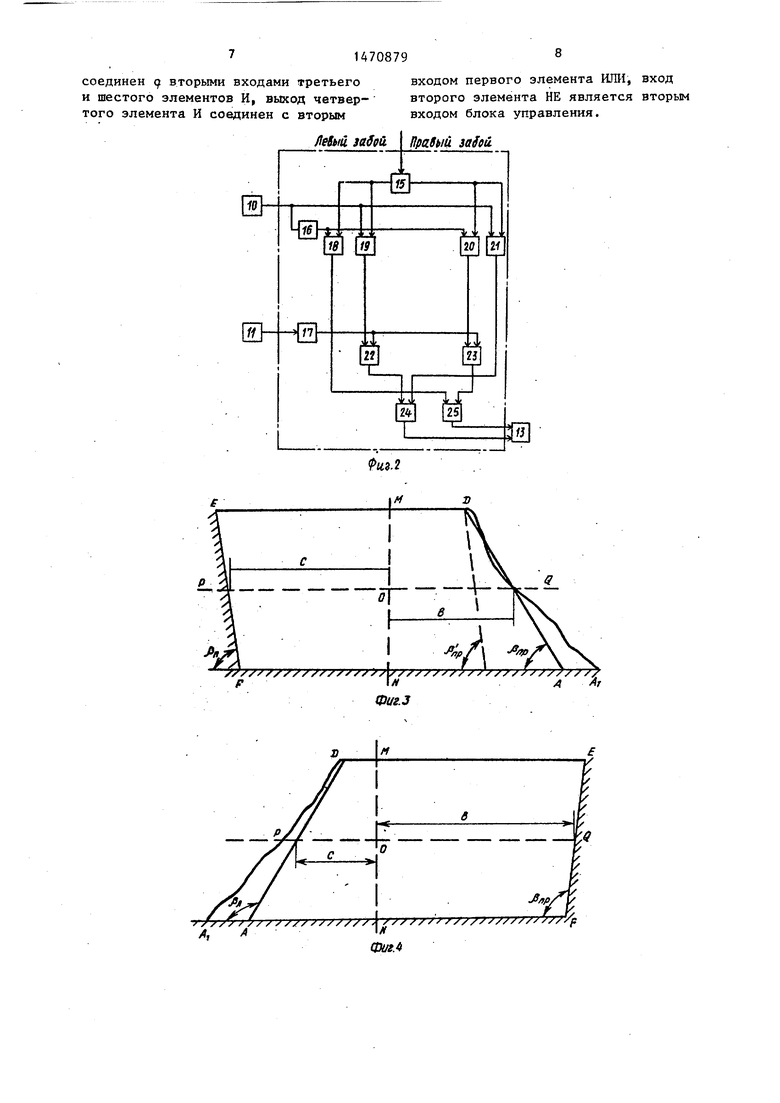
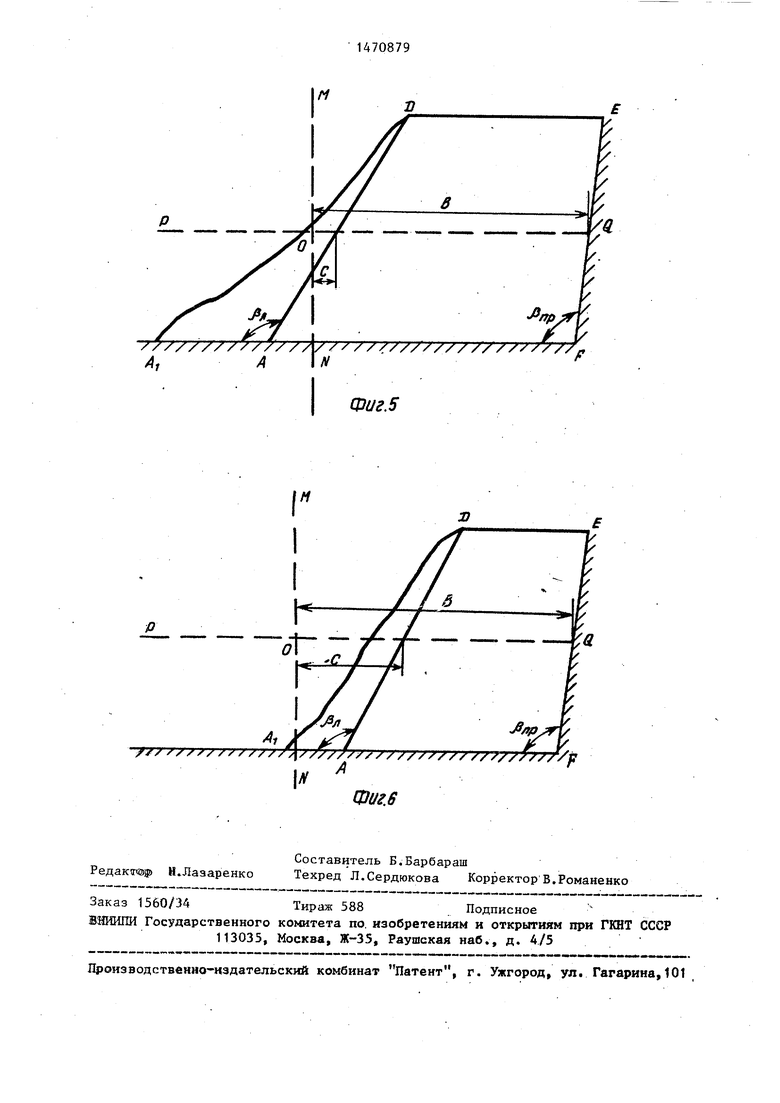
На фиг. 1 представлена структур- ная схема устройства программного управления поворотным механизмом роторной стрелы экскватора; на фиг.2 - функциональная схема блока управле- ния;на фиг.3-6 - забой, в котором работает роторный.экскаватор; фиг,3 то же, с боковым уступом, расположенным слева от роторного экскаватора; фиг. 4 - то же, с боковым уступомj расположенным справа от роторного экскаватора; фиг, 5 - суженный забой (левый откос в нем -частично расположен по правую сторону от плоскости MN перемещения экскаватора); фиг.6 - то же, (левый откос полностью рас- положен по правую сторону от плоскости MN) .
На фиг. 3-6 обозначены подошва AF уступа; боковые откосы AD (фиг. 3) и EF (фиг. 4 - 6) со стороны уступа и, наоборот, боковые откосы EF (фиг.З и AD (фиг. 4-6) со стороны выработанного пространства; реальная поверхность откоса со стороны выработанного пространства; углы р, в„р боковых откосов уступа соответственно с левой и правой сторон забоя; величины В, С задания правой и левой частей заходки (на фиг. 3 В;.- ширина внешней частей заходки, С - ширина внутренней части заходки, на фиг. 4 - 6, наоборот, В - ширина внутренней части, а С - внешней части заходки); горизонтальная плоскость PQ на уровне шарнира роторной стрелы.
Устройство программного управления поворотным механизмом роторной стрелы экскаватора содержит задатчик 1 конструктивного параметра, сельсин- ные датчики угла наклона -роторной стрелы с косинусным 2 и синусным 3 преобразованием, задатчики параметров забоя: левого 4 и правого 5 углов боковых откосов уступа, ширины левой 6 и правой 7 частей заходки, коммутатор 8, датчик 9 угла поворота роторной стрелы, фазочувствительный детектор 10, датчик 11 нагрузки роторного колеса, блок 12 управления.
исполнительный элемент 13, механизм 14 поворота роторной стрелы.
Блок управления включает переключатель 15, два элемента НЕ 16 и 17 (инверторы), шесть элементов И 18 - 23 и два элемента ИЛИ 24 и 25.
Устройство работает следующим образом.
На выходе фазочувствительного де- .тектора to появляется сигнйл в момен
,i.. алгебраической суммы. напряжений, поданных на его вход
U,+U,+Ue,7 0,
где и - напряжение на выходе датчика 9 угла поворота, роторной стрелы;
U.J - напряжение на выходе датчика 3 угла наклона роторной стрелы;
- напряжение на выходе коммутатора 8.
На вход датчика 9 угЛа поворота роторной стрелы подается сумма напряжений с выхода задатчика 1 конструктивного параметра и датчика 2 угла наклона роторной стрелы с косинусным преобразованием. Напряжение U, с выхода задатчика 1 пропорционально сумме двух величины
и,,
где 1 - эксцентриситет шарнира роторной стрелы, равный расстоянию по горизонтали между осями наклона и поворота роторной стрелы;
г - радиус роторного колеса. Напряжение U2 е выхода датчика 2 cos If.
Следовательно, напряжение на выхо Ле датчика 9 U, (L costf+K) .
На вход датчика 3 подается через коммутатор 8 напряжение, пропорциональное ctg(c выхода задатчика 4) при повороте роторной стрелы влево и пропорциональное ctg /inp (с выхода задатчика 5) при повороте стрелы . ; вправо.
Следовательно, напряжение на выходе датчика 3 U,sin( д или U : L sinq ctgj3np.
Напряжение U пропорционально С (ширине левой части заходки, снимается с выхода задатчика 6) при поворо- те стрелы влево или В (ширине правой части заходки, снимается с выхода : задатчика 7) при повороте стрелы вправо.
Следовательно, при повороте роторной стрелы влево на вход фазочувстви- тельного детектора подается алгебраическая сумма напряжений
U,+Uj+Ug (Lcoscf+K) +Lsin(pctgfin+C, а при повороте роторной стрелы вправо
,+и (Lcosqн-K)sinc +Lsinq ctgp,пp+B.
В момент равенства нулю напряжения на входе фазочувствительного детектора 10 на его выходе формируется сигнал, который поступает в блок 12 управления. В этот блок также вводится сигнал с датчика 11 нагрузки роторного колеса. Кроме того, машинист с помощью переключателя 15 вводит в блок 12 управления сигнал о том, слева или справа от экскаватора находится боковой уступ. В .результате блок 12 управления формирует один из двух сигналов, поступающих на исполнительный элемент 13, который подает управляющие сигналы на коммутатор 8 . .и привод механизма 14 поворота ротор- :Ной стрелы. При этом, коммутатор переключает две пары напряжений. Одна пара напряжений - это напряжения, пропорциональные величине задания ctg д и ctgpqp. Эти напряжения с выхода за- ,датчиков 4 и 5 поступают на вход датчика 3 угла наклона с синусным преобразованием. Вторая пара напряжений, пропорциональных величине задания С и В, с выхода задатчиков 6 и 7 поступают ,в последовательную цепь на входе фазочувствительного детектора 10. При повороте роторной стрелы влево на вход датчика 3 угла наклона подается напряжение, пропорциональное ctgp, а последовательно с выходом датчика 3 включается напряжение, пропорциональное С. При повороте стрелы вправо подключаются соответственно напряжения, пропорциональные ctg|Ь„ и В.
Блок 12 управления анализирует различные варианты работы роторного экскаватора в забое и производит сле- .дующие операции.
Во время работы экскаватора в забое, в котором уступ расположен слева при повороте роторной стрелы вле- во с выхода блока 12 управления по- ступает сигнал на исполнительный элемент 13 непосредственно После поступления сигнала с выхода фазочувствительного детектора 10, а при .повороте роторной стрелы вправо с выхода бло10
5
0
5
0
5
0
5
0
5
ка 12 управления поступает сигнал на исполнительный элемент 13 не сразу после поступления сигнала с выхода фазочувствительного детектора 10, а только после того, как с выхода датчика 11 нагрузки роторного колеса поступит сигнал об исчезновении полезной нагрузки..
Во время работы экскаватора в забое, в котором уступ расположен справа, сигнал на исполнительный элемент 13 поступает при повороте роторной стрелы вправо (после поступления сигнала с выхода детектора 10) и при повороте роторной стрелы влево и поступлении сигнала с выхода детектора (после исчезновения полезной нагрузки на датчике 11).
Работу блока 12 управления можно пояснить на примере, когда роторный экскаватор работает в забое, в котором боковой уступ расположен слева. При этом с выхода переключателя 15 подается единичный сигнал на первые входы элементов И 18 и 19. Принимаем также, что при повороте роторной стрелы вправо с выхода фазочувстви- тельного детектора 10 снимается единичный сигнал, а при повороте влево- нулевой. Тогда при повороте стрелы влево с выхода инвертора 16 снимает- ,ся единичный сигнал, который поступает на элемент И 18. С выхода этого элемента через элемент ИЛИ 25 сигнал подается на исполнительный элемент 13, который формирует сигнал на реверс стрелы вправо. При повороте стрелы вправо единичный сигнал с выхода детектора 10 подается на элемент И 19, а с его выхода - на элемент И 22. На второй вход элемента И 22 поступает сигнал с выхода датчика 11 нагрузки роторного колеса через элемент НЕ 17. Этот сигнал равен единице, когда привод роторного колеса не нагружен. Тогда с выхода элемента И 22 снимется единичный сигнал, который через элемент ИЛИ 24 поступает на вход исполнительного элемен- . та 13. По этому сигналу роторная стрела реверсируется влево.
При работе роторного экскаватора в забое, в котором боковой уступ рас- полбжен справа, машинист с помощью переключателя 15 подает единичный сигнал на элементы И 20 и 21, которые в этом варианте работают совместно с.элементом И 23 аналогично
описанной работе элементов И 18, 19. и 22.
Величины ctgp, ctgpnp. С, В за- даются с помощью 55адатчиков, выпрл- ненных на поворотных трансформаторах или сельсинах, в которых поворотом ротора можно изменять не только величину выходного напряжения, но и его фазу. Это позволяет задавать ширину Q заходки и котангенс угла бокового откоса уступа не только от нуля- до максимального значения, но и от величины меньше нуля (при этом фаза задающего напряжения изменяется на про- 15 дом коммутатора, третий выход кото- тивоположную простым поворотом рото- рого соединен с вторым входом фазо- ра трансформатора или сельсина), что соответствует работе экскаватора в забое, в котором боковой уступ расположен не только справа, но и слева, 20 а также при работе экскаватора узкими заходками,
Если, например, размер С (фиг.5 и 6) расположен по правую сторону от вертикальной оси, то его величина .25 задается напряжением, фаза которого изменена на противоположную по сравнению с нормальным расположением размера С (фиг. 4).
Аналог йчно при работе в забое.
входом датчика угла поворота роторной стрелы, первый выход которого соединен с первым входом фазочувстви тельного детектора, выход которого соединен с первым входом блока управ ления, первый и второй выходы которо го подключены к входам исполнительно го элемента, выход которого соединен с первым входом коммутатора, первый и второй выходы которого соединены с первым и вторым входами первого датчика угла наклона роторной стрелы выход которого соединен с вторым вхо
чувствительного детектора, второй вы ход второго датчика угла.наклона со динен с вторым входом датчика угла поворота роторной стрелы, второй вы ход которого соединен с третьим вхо дом первого датчика угла наклона ро торной стрелы, все выходы задатчико четырех параметров забоя соединены с остальными входами коммутатора, вы ход датчика нагрузки роторного коле са соединен с вторым входом блока управления.
30
2. Устройство по п. 1, отличающееся тем, что блок упра ления содержит шесть элементов И, два элемента НЕ, два -элемента ИЛИ и переключатель, первый выход которог 2g соединен с первыми входами первого э.п.емгнта И и второго элемента И, вы
в котором боковой уступ расположен справа (фиг, 4), фаза напряжений, с помощью которых задают ctg (3 и ctg((,p
должна ,быть сдвинута на 180° по сравнению с фазами напряжений, с помощью которых задают те же углы при работе экскаватора в забое (фиг. 3).
Формула изобретения
1. Устройство программного управления поворотным механизмом роторной стрелы экскаватора, содержащее датчи угла, поворота роторной стрелы, первый датчик угла наклона роторной стрелы, задатчики трех параметров забоя, датчик нагрузки роторного колеса, коммутатор, исполнительный элемент, отличающееся- тем, что, с целью повышения точности отработки внешнего забоя роторной стрелой экскаватора, в него в ведены фазочувствительный детектор, блок управления, задатчик четвертого параметра забоя, задатчик конструктивного параметра и второй датчик угла наклона роторной стрелы, первьш выход которого через задатчик конструктивного параметра соединен с первым
дом коммутатора, третий выход кото- рого соединен с вторым входом фазо-
входом датчика угла поворота роторной стрелы, первый выход которого соединен с первым входом фазочувстви- тельного детектора, выход которого соединен с первым входом блока управления, первый и второй выходы которого подключены к входам исполнительного элемента, выход которого соединен с первым входом коммутатора, первый и второй выходы которого соединены с первым и вторым входами первого датчика угла наклона роторной стрелы, выход которого соединен с вторым вхо-
дом коммутатора, третий выход кото- рого соединен с вторым входом фазо-
чувствительного детектора, второй выход второго датчика угла.наклона соединен с вторым входом датчика угла поворота роторной стрелы, второй выход которого соединен с третьим входом первого датчика угла наклона роторной стрелы, все выходы задатчиков четырех параметров забоя соединены с остальными входами коммутатора, выход датчика нагрузки роторного колеса соединен с вторым входом блока управления.
2. Устройство по п. 1, отлиающееся тем, что блок управения содержит шесть элементов И, ва элемента НЕ, два -элемента ИЛИ и переключатель, первый выход которого соединен с первыми входами первого э.п.емгнта И и второго элемента И, вы-
xOi), которого соединен с первым входом третьего элемента И, выход которого соединен с первым входом первого
элемента ИЛИ, выход которого является первым выходом блока управления, второй вход которого подключен к входу переключателя, второй выход коч торого соединен с первыми входами
четвертого элемента И и пятого элемента И, выход которого соединен с первым входом шестого элемента И, выход которого соединен с первым входом второго элемента ИЛИ, выход ко-
торого является вторым выходом блока управления,, вход первого элемента НЕ соединен с вторыми входами второго и четвертого элементов И и является первым входом блока управления, выход
первого элемента НЕ соединен с вторыми входами пятого элемента И и первого элемента И, выход которого соединен с вторым входом второго элемента ИЛИ, выход второго элемента НЕ t
соединен 9 вторыми входами третьего входом первого элемента ИЛИ, вход и шестого элементов И, выход четвер- второго элемента НЕ является вторым того элемента И соединен с вторым входом блока управления.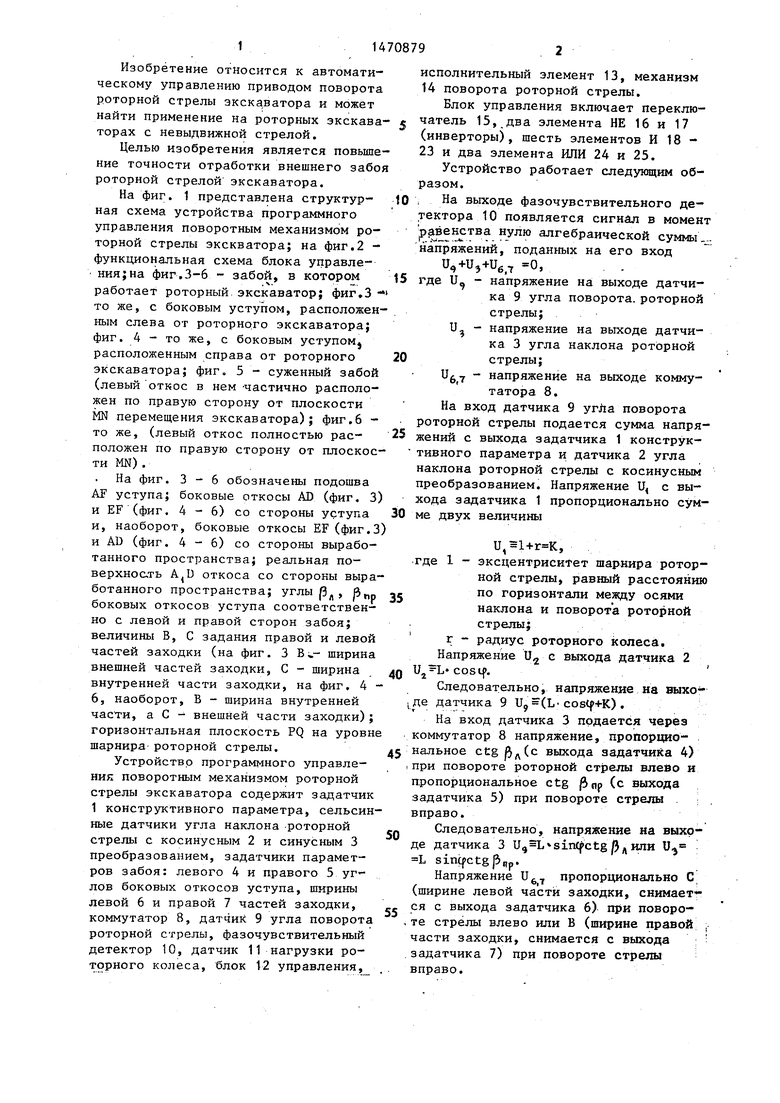
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
| Устройство для автоматического управления поворотом роторной стрелы экскаватора | 1980 |
|
SU899761A1 |
| Устройство автоматического управления приводом поворота роторной стрелы экскаватора с невыдвижной стрелой | 1973 |
|
SU570676A1 |
| Способ автоматического управления приводом поворота роторной стрелы экскаватора с невыдвижной стрелой | 1978 |
|
SU713947A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Способ отработки уступа | 1987 |
|
SU1606660A1 |
| Устройство программного управления роторной погрузочной машиной | 1984 |
|
SU1177419A1 |
Изобретение относится к области автоматического управления приводом поворота роторной стрелы (РС) экскаватора и может найти применение на роторных экскаваторах с невыдвижной стрелой. Целью изобретения является повышение точности отработки внешнего забоя РС экскаватора. При работе экскаватора сигналы с задатчиков параметров забоя: левого 4 и правого 5 углов боковых откосов уступа и ширины левой 6 и правой 7 частей заходки поступают в коммутатор 8. Сигналы с задатчика 1 конструктивного параметра и сельсинного датчика 2 угла наклона РС с косинусным преобразованием поступают на вход датчика 9 угла поворота РС. НА ВХОДЫ ДАТЧИКА 3 УГЛА НАКЛОНА РС с синусным преобразованием поступают напряжения с коммутатора 8 и с датчика 9 угла поворота РС. С ПОСЛЕДНЕГО ВЫХОДНОЙ СИГНАЛ ПОСТУПАЕТ НА ОДИН ИЗ ВХОДОВ ФАЗОЧУВСТВИТЕЛЬНОГО ДЕТЕКТОРА 10, ДРУГОЙ ВХОД КОТОРОГО ПОДКЛЮЧЕН К КОММУТАТОРУ 8. СИГНАЛЫ С ВЫХОДА ФАЗОЧУВСТВИТЕЛЬНОГО ДЕТЕКТОРА 10 И ДАТЧИКА 11 НАГРУЗКИ РОТОРНОГО КОЛЕСА ПОСТУПАЮТ В БЛОК 12 УПРАВЛЕНИЯ, КОТОРЫЙ ЧЕРЕЗ ИСПОЛНИТЕЛЬНЫЙ ОРГАН 13 УПРАВЛЯЕТ МЕХАНИЗМОМ 14 ПОВОРОТА РС и коммутатором 8. Блок 12 управления содержит шесть элементов И, два элемента НЕ, два элемента ИЛИ и переключатель. Устройство обеспечивает работу экскаватора в забое, в котором боковой уступ расположен не только справа, но и слева, а также при работе экскаватора узкими заходками. 1 з.п.ф-лы, 6 ил.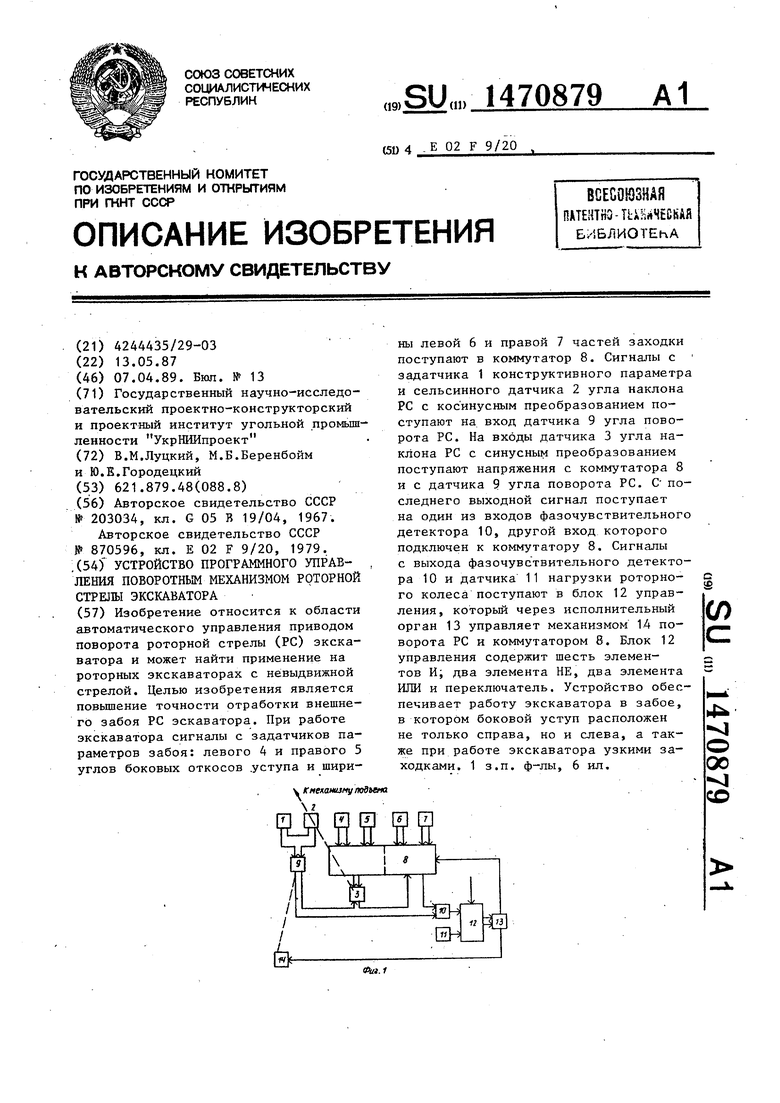
fleibiu. забей.
Щ 19
tTf fffff
Правый safeu
®
:
25
«
Vi ГУч
/ Х Х//Х/Х// ///ХУ/
г f г f
A A,
ФигЛ
А,
Y
N
//////////////i/x// ///////х//////// //
Фиг.5
в
Фиг.6
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ | 0 |
|
SU203034A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
