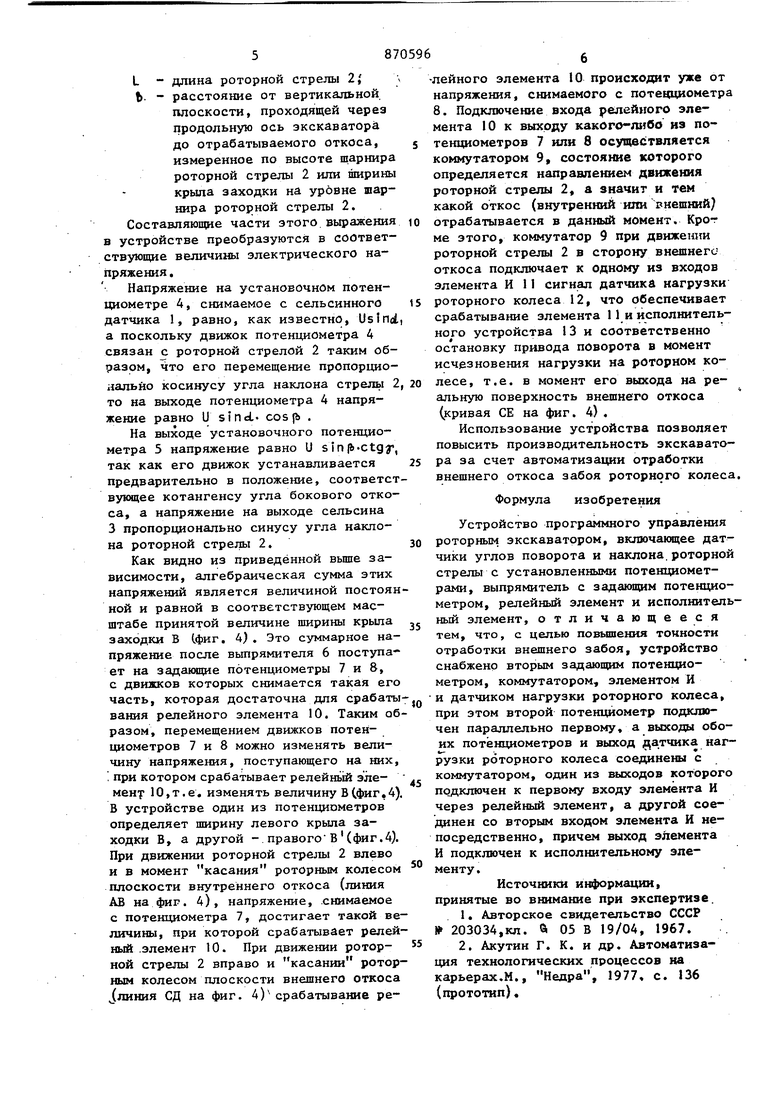
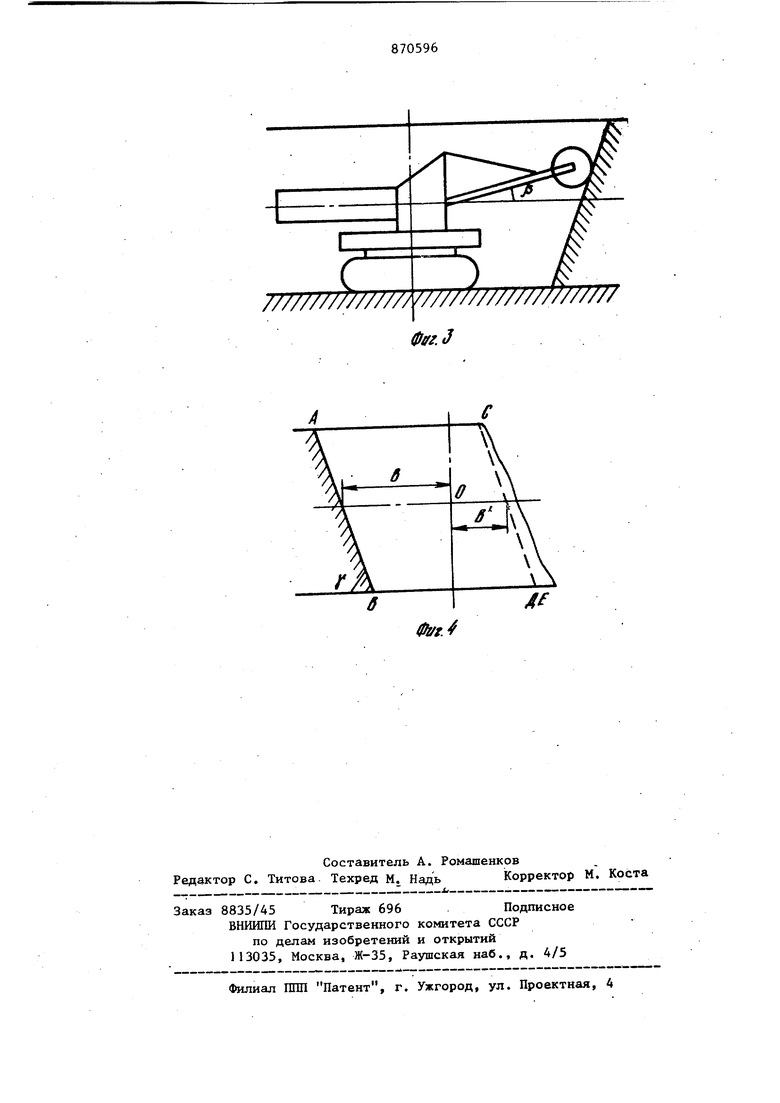
t54) УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ РОТОРНШ Изобретение относится к устройствам программного управления роторнь1м экскаватором и может быть использовано на роторных экскаваторах с невьщвижной стрелой. В забое роторного кскаватора раз личают боковой откос уступа в виде, .внутреннего и внешнего откоса, необходимость образования которых определяется безопасностью ведения горных работ в карьере. Угол внутреннего отк9са зависит от физико-механических свойств экскавируемого материала и может быть определен заранее, а внешний откос уступа, подве женный как самопроизвольному разрушению, так и разрушению вследствие самого процесса экскавации или бурбвзрывных работ в забое, может иметь различные углы наклона и всевозможные нарушения поверхности. Известно устройство для программного управления поворотным механизм мом роторного экскаватора, содерЭКСКАВАТОРОМжащее датчик наклона стрелы экскаватора, датчик угла откоса и датчик ширины заходки, которые вводят в программный блох текущие значения измеряемой информации и служат одновременно конечными выключателями, причем программный блок подключен к магнитному делителю,нагруженному на привод поворота стрелы роторного экскаватора D3. Это устройство позволяет автоматизировать отработку внутреннего откоса уступа, однако не обеспечивает эффективной отработки внешнего откоса, поскольку в нем задается только ширина внутреннего крыла заходки« а наличие в нем большого количества счетно-решающих элементов делает его . сложным и ненадежным. Известно устройство программного управления роторным экскаватором, включающее датчики углов поворота и наклона роторной стрелы с установочojtm потенциометрами, выпрямитель с .ведающим потенциометром, релейный эле мент и исполнительиый элемент. Один установочный потенциометр включен на выходе датчика угла наклона роторной стрелы, а второй - угла поворота роторной стрелы. Задающий потенциометр включён на входе релейного элемента 21. Действие этого устройства основано на решении им аналитической зависимости между углом поворота роторной стрелы от оси забоя, углом наклона к горизонту, углом бокового откоса и величиной, равной отношению ширины крыла заходки на уровне шарнира ротор ной. сугрелы к длине роторной стрелы. У,стйновочным потенциометром, включенным на выходе датчика угла наклона роторной стрелы, устанавливается необходимая величина угла отрабатываемого бокового откоса, задающим потенциометром, включенным на входе релейного элемента, задается величина ширины крыла заходки. Недостатком этого известного устройства является то, что оно позволяет точно отработать только внутренний откос забоя, так как в устройстве имеется только один задающий по тенциометр, определяющий ширину заходки. Внешний откос из-за разрушений не может иметь форму плоскости и поэтому не может быть точно отрабо тан с помощью сигнала, задающего тол ко ширину заходки. Отработка его может быть выполнена под контролем машиниста визуально, что усложняет про цесс управления экскаватором. Ручная отработка машинистом внешнего от коса уступа приводит также к снижению скорости поворота экскаватора, . а следовахельно, к уменьшению его пр изводительности. Целью изобретения является повышение точности отработки внешнего от коса забоя. Поставленная цель достигается тем что устройство программного управления роторным экскаватором снабжено BTOIHJM задаюш;им потенциометром, коммутатором, элементом И и на- 50 шени грузки роторного колеса, при этом вто-- виси рой потенциометр подключен параллельно первому, а выходы обоих потенцио- где метров и выход датчика нагрузки ротор кого колеса соединены с коммутатором, 55 один из выходов которого подключен к первому входу элемента И через редейный элемент, а другр соединен с вторым входом элемента И непосредственно, причем выход элемента И подключен к исполнительному устройству. Установку дополнительного задающего потенциометра обеспечивает независимую настройку ширины лрыла. как для внутреннего, так и для внешнего откоса, а установка датчика нагрузки роторного колеса дает возможность автоматически отрабатывать внешний откос любой реальной формы. На фиг, I представлена блок схема программного управления роторным экс- каватором; на фиг. 2 - положение экскаваторав забое, вид в плане; на фиг. 3 - положение экскаватора в за- бое, вид сбоку$ на фиг. 4 - вид забоя вдоль линии перемещения экскаватора. Устройство программного управления роторным экскаватором включает сельсинный датчик 1 угла поворота роторной стрелы 2 (фиг. 2)j сельсинный датчик 3 угла наклона роторной стрелы 2, роторные обмотки которых соединены с установочными потенциометрами 4 и 5, выпрямитель 6, задающие потенциометры 7 и 8, коммутатор 9, релейный элемент 10, элемент И II .(схема совпадения) , датчик 12 нагрузки роторного колеса, исполнительное устройство 13. Движок установочного потенциометра 4 авязан механически с осью роторной стрелы 2 и перемещается при изменении ее угла наклона, а вьпсоды установочных потенциометров 4 и 5.сое- динены последовательно и их суммарный сигнал поступает на выпрямитель 6, выход которого соединен с задающими потенциометрами 7 и 8, выходы последних соединены через коммутатор 9 со входом релейного элемента 10, выход которого соединен с одним из входов элемента И П. Второй вход элемента И 11 также через коммутатор 9 соединен с выходом датчика 12, а выход элемента И 11 соединен с исполнительным устройством 13, действующим на привод поворотного механизма экскаватора. Работа устройства основана на реи им известной аналитичес кой замости , Lsind-cosjb- Lsln(ictgy б, at угол поворота роторной стрелы 2,отс читываемый от продольной оси экскаватора; {Ь угол наклона роторной стрелы 2 к горизонту; угол бокового откоса; Т длина роторной стрелы 2f расстояние от вертикальной плоскости, проходящей через продольную ось экскаватора до отрабатываемого откоса, измеренное по высоте шарнира роторной стрелы 2 или ширины крыла заходки на уровне шарнира роторной стрелы 2. Составляющие части этого выражения в устройстве преобразуются в соответствующие величины электрического напряжения . Напряжение на установочном потенциометре 4, снимаемое с сельсинного датчика 1, равно, как известно, Ustnci а поскольку движок потенциометра 4 связан с роторной стрелой 2 таким образом, что его перемещение пропорциолально косинусу угла наклона стрель 2 то на выходе потенциометра 4 напряжение равно и sind cos|b . На выходе установочного потенциометра 5 напряжение равно U sinib-ctgy, так как его движок устанавливается предварительно в положение, соответст вующее котангенсу угла бокового откоса, а напряжение на выходе сельсина 3 пропорционально синусу угла наклона роторной стрелы 2. Как видно из приведённой выше зависимости, алгебраическая сумма этих напряжений является величиной постоян ной и равной в соответствующем масштабе принятой величине ширины крыла заходки В Сфиг. 4). Это суммарное напряжение после вьтрямителя 6 поступает на задающие потенциометры 7 и 8, с движков которых снимается такая его часть, которая достаточна для срабаты вания релейного элемента 10. Таким об разом, перемещением движков потенциометров 7 и 8 можно изменять величину напряже1шя, поступающего на них, при котором срабатывает релейньй элемент 10,т.е. изменять величину В (фиг,4). В устройстве один из потенциометров определяет ширину левого крыла заходки В, а другой - правогоВ (фиг.4). При движении роторной стрелы 2 влево и в момент касания роторным колесом плоскости внутреннего откоса (линия АВ на фиг. 4), напряжение, .снимаемое с потенциометра 7, достигает такой величины, при которой срабатывает релейный .элемент 10. При движении роторной стрелы 2 вправо и касании роторным колесом плоскости внешнего откоса линия СД на фиг. 4) срабатывание релейного элемента 10 происходит уже от напряжения, снимаемого с поте1щиометра 8. Подключение входа релЁЙ юго элемента 10 к выходу какого-штбо из потенциометров 7 или 8 осуществляется коммутатором 9, состояние которого определяется направлением движения роторной стрелы 2, а значит и тем какой откос (внутренний или внешний} отрабатывается в данный момент. Крог ме этого, коммутатор 9 при движении роторной стрелы 2 в сторону внешнего откоса подключает к одному из входов элемента И 11 сигнал датчики нагрузки роторного колеса 12, что обеспечивает срабатывание элемента 11 и исполнительного устройства 13 и соответственно остановку привода поворота в момент исчезновения нагрузки на роторном колесе, т.е. в момент его выхода на реальную поверхность внешнего откоса (кривая СЕ на фиг. 4) . Использование устройства позволяет повысить производительность экскаватора за счет автоматизации отработки внешнего откоса забоя роторного колеса. Формула изобретения Устройство программного управления роторным экскаватором, включающее датчики углов поворота и наклона.роторной стрелы с установленными потенциометрами, выпрямитель с задающим потенциометром, релейный элемент и исполнительный элемент, отличающееся тем, что, с целью повышения точности отработки внешнего забоя, устройство снабжено вторым задающим потенциометром, коммутатором, элементом И и датчиком нагрузки роторного колеса, при этом второй потенциометр подключен параллельно первому, а выходы обоих потенциометров и выход ; атчика нагрузки роторного колеса соединены с коммутатором, один из ш 1ходов которого подключен к первому входу элемента И через релейный элемент, а другой соединен со вторым входом элемента И непосредственно, причем выход элемента подключен к исполнительному элеенту. Источники информации, ринятые во внимание при экспертизе. 1.Авторское свидетельство СССР 203034,кл. а 05 В 19/04, 1967. 2.Акутин Г. К. и др. Автоматизаия технологических процессов на арьерах.М., Недра, 1977, с. 136 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления поворотным механизмом роторной стрелы экскаватора | 1987 |
|
SU1470879A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Устройство программного управления роторной погрузочной машиной | 1984 |
|
SU1177419A1 |
| Способ отработки уступа | 1987 |
|
SU1606660A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ С НЕВЫДВИЖНОЙ СТРЕЛОЙ | 1966 |
|
SU214641A1 |
| Устройство для автоматического управления поворотом роторной стрелы экскаватора | 1980 |
|
SU899761A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММИРОВАНИЯ и АВТОМАТИЧЕСКОЙ | 1964 |
|
SU164844A1 |
| Устройство формирования бокового откоса карьера для роторного экскаватора | 1972 |
|
SU546682A1 |

//////////////// /7////////////////////
0ff/.J
